自动导引运输车的控制方法、装置、设备及存储介质与流程
本技术涉及自动导引运输车的控制领域,具体涉及自动导引运输车的控制方法、装置、设备及存储介质。
背景技术:
1、随着工业自动化的发展,自动导引运输车(automated guided vehicle,agv)依靠以规定速度在导引路径上运动的优势在工业应用中脱颖而出。实际应用中多采用磁导航的方式控制agv的行驶。大致工作流程为agv控制系统通过agv上的磁导航传感器感知地面磁条的磁场信号,然后根据磁场信号的强度和方向来确定agv的位置和方向,进而控制agv的行驶。但在实际应用中,会因为磁场信号的延迟、变化以及干扰等因素,会出现agv姿态不稳以及偏离导引路径的情况,这就需要对agv的行驶进行纠偏,以使agv稳定运行。
2、对agv的行驶进行纠偏的传统方法是agv控制系统通过agv上的磁导航传感器实时采集agv的偏距值(偏距值为agv的行驶路径偏离导引路径中磁条中心线的距离),将该采集的偏距值用于后续的导航纠偏计算,进而依据导航纠偏计算的结果控制agv的行驶以提高磁导航的精度。但传统方法中由于通信延迟以及agv中电机响应延迟,会导致agv控制系统对agv的控制效果具有滞后性,从而会导致agv在运行过程中产生晃动,导致agv脱轨等问题降低磁导航的精度。
3、因此,如何提高agv运行的稳定性以及磁导航的精度,已成为急需解决的问题。
技术实现思路
1、有鉴于此,本技术提供了一种自动导引运输车的控制方法、装置、设备及存储介质,以解决如何提高agv运行的稳定性以及磁导航的精度的问题。
2、第一方面,本技术提供了一种自动导引运输车的控制方法,应用于自动导引运输车控制系统,该方法包括:
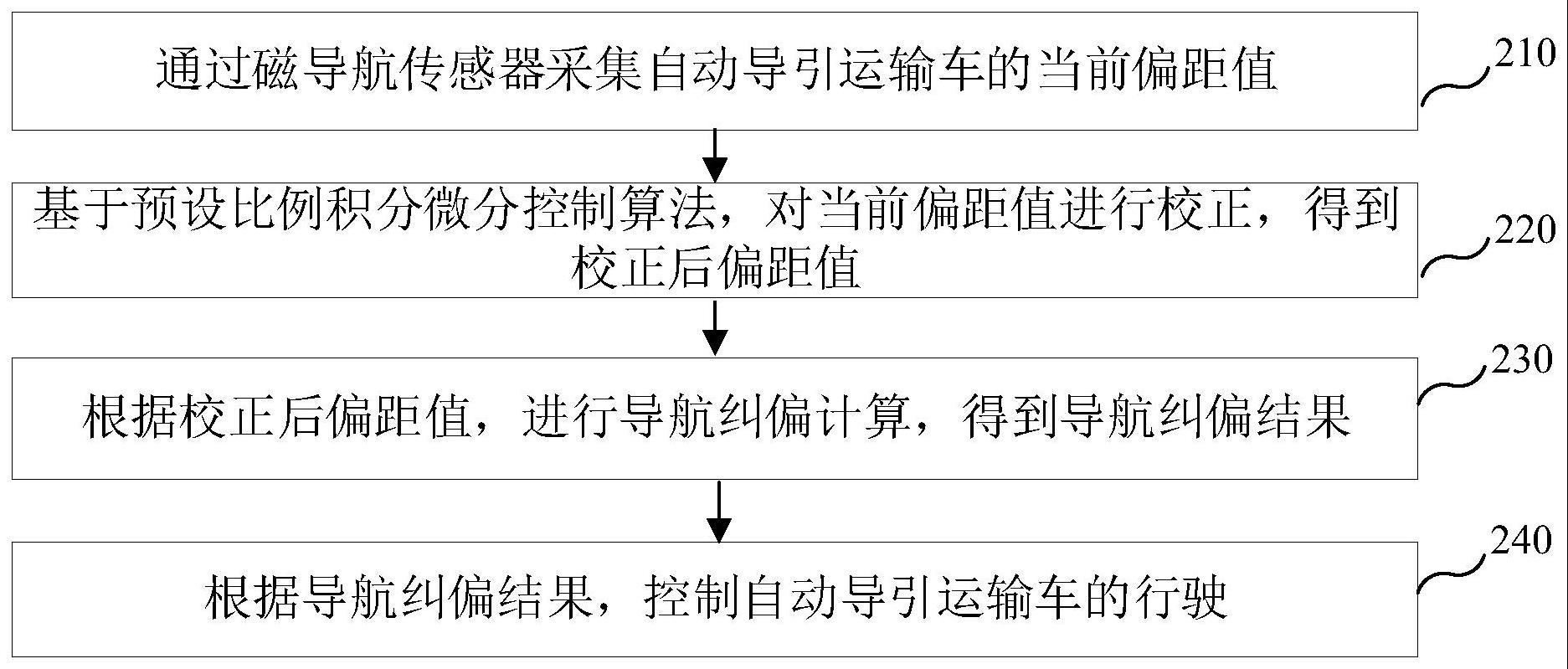
3、通过磁导航传感器采集自动导引运输车的当前偏距值;当前偏距值用于指示当前自动导引运输车偏离导引路径中磁条中心线的距离与方向;磁导航传感器安装在自动导引运输车上;
4、基于预设比例积分微分控制算法,对当前偏距值进行校正,得到校正后偏距值;预设比例积分微分控制算法用于控制自动导引运输车稳定运行;
5、基于校正后的偏距值通过运动控制算法,控制自动导引运输车的行驶。
6、在上述技术方案中,在通过自动导引运输车上的磁导航传感器采集自动导引运输车的当前偏距值后,通过可以控制自动导引运输车稳定运行的预设比例积分微分控制算法对当前偏距值进行校正,使得校正后偏距值具有稳定性,以抵消通信延迟以及agv中电机响应延迟对通过磁导航传感器采集的当前偏距值的影响。进而基于校正后的偏距值通过运动控制算法,控制自动导引运输车的行驶时就可以抵消通信延迟以及agv中电机响应延迟造成的不良影响,提高磁导航的精度从而使agv的运行姿态更稳定。
7、在一种可选的实施方式中,预设比例积分微分控制算法包括比例参数、积分参数以及微分参数;基于预设比例积分微分控制算法,对当前偏距值进行校正,得到校正后偏距值,包括:
8、获取磁导航传感器采集的各个历次周期偏距值;
9、根据当前偏距值、比例参数、积分参数、微分参数以及历次周期偏距值,校正当前偏距值,得到校正后偏距值。
10、在上述技术方案中,通过利用各个历次周期偏距值以及可以用于控制agv稳定运行的预设比例积分微分控制算法中的比例参数、积分参数以及微分参数对当前偏距值进行校正,考虑到agv的偏距值在当前时刻之前的变化,进一步提高校正后偏距值的可靠性,进而后续基于该校正后偏距值对agv的行驶进行纠偏时,可以进一步减少agv运行过程中的晃动与超调,避免因为响应问题造成的脱轨与对接精度不够的问题,从而提高生产效率。
11、在一种可选的实施方式中,根据当前偏距值、比例参数、积分参数、微分参数以及历次周期偏距值,校正当前偏距值,得到校正后偏距值,包括:
12、根据比例参数,处理当前偏距值,得到放大后偏距值;
13、根据积分参数、历次周期偏距值以及当前偏距值,计算自动导引运输车的积分表现;
14、根据微分参数以及当前偏距值与上一时刻的历次周期偏距值之间的差值,计算自动导引运输车的微分表现;
15、根据预设参数,整合放大后偏距值、积分表现以及微分表现,以得到校正后偏距值。
16、在上述技术方案中,分别根据预设比例积分微分算法中的比例参数对当前偏距值进行处理,以对当前偏距值进行适当的缩放;基于积分参数、历次周期偏距值对当前偏距值进行处理,计算agv的在一段时间内的积分表现以提高后续校正后偏距值的可靠性;基于微分参数以及当前偏距值与上一个历次周期偏距值的差值,计算agv的微分表现,可以在后续的校正后偏距值的计算中,抵消基于积分参数计算的积分表现的不当变化,快速实现在导引路径中弯道恢复直线以及分叉口处路径选择。进而依据预设参数整合计算得到的校正后偏距值就具有使agv稳定运行的特性。
17、在一种可选的实施方式中,在基于预设比例积分微分控制算法,对当前偏距值进行校正,得到校正后偏距值之前,方法还包括:
18、根据磁导航传感器的分辨率、预设分叉运行表现、预设直线运行表现以及预设弯道运行表现,确定比例参数、积分参数以及微分参数,以使预设比例积分微分控制算法控制自动导引运输车稳定运行;
19、预设分叉表现用于指示自动导引运输车在导引路径中的分叉路口处的期望运行表现。
20、在上述技术方案中,考虑自动导引运输车中磁导航传感器的分辨率以及期望的预设分叉运行表现、预设直线运行表现以及预设弯道运行表现,来确定预设比例积分微分控制算法中的比例参数、积分参数以及微分参数,可以使比例参数、积分参数以及微分参数符合预设的各个运行表现进而使预设比例积分微分控制算法控制自动导引运输车稳定运行。
21、在一种可选的实施方式中,根据磁导航传感器的分辨率、预设分叉运行表现、预设直线运行表现以及预设弯道运行表现,确定比例参数、积分参数以及微分参数,包括:
22、根据磁导航传感器的分辨率以及预设系数,调整待更新比例参数;
23、根据自动导引运输车在导引路径中直线路径以及弯道路径的运行表现是否分别满足预设直线运行表现以及预设弯道运行表现,确定是否调整待更新积分参数以及待更新比例参数;
24、根据自动导引运输车在导引路径中分叉路口处的运行表现是否满足预设分叉运行表现,确定是否调整待更新微分参数;
25、将更新后的待更新比例参数、待更新积分参数以及待更新微分参数,分别确定为比例参数、积分参数以及微分参数。
26、在上述技术方案中,根据磁导航传感器的分辨率以及预设系数,调整待更新比例参数,进而依据自动导引运输车在导引路径中直线路径以及弯道路径的运行表现是否分别满足预设直线运行表现以及预设弯道运行表现,和导引路径中分叉路口处的运行表现是否满足预设分叉运行表现来确定比例参数、积分参数以及微分参数,可以保证确定后的比例参数、积分参数以及微分参数使agv更稳定的运行。
27、在一种可选的实施方式中,根据积分参数、历次周期偏距值以及当前偏距值,计算自动导引运输车的积分表现,包括:
28、计算各个历次周期偏距值的和,得到第一和值;
29、计算当前偏距值与第一和值的和,得到第二和值;
30、计算第二和值与积分参数的乘积,得到第一乘积值;
31、将第一乘积值确定为自动导引运输车的积分表现。
32、上述技术方案中,通过计算各个历次周期偏距值的和得到第一和值,进而计算当前偏距值与第一和值的和,将各个历次周期偏距值与当前偏距值累计在一起。从而就散第二和值与积分参数的乘积以得到的积分表现,就可以反映agv启动后到当前时刻的偏距值变化,提高了积分表现的可靠性。
33、在一种可选的实施方式中,根据预设参数,整合放大后偏距值、积分表现以及微分表现,以得到校正后偏距值,包括:
34、计算放大后偏距值、积分表现以及微分表现的和,得到第三和值;
35、计算第三和值以及预设参数的乘积,得到第二乘积值;
36、将第二乘积值确定为校正后偏距值。
37、在上述技术方案中,对放大后偏距值、积分表现以及微分表现进行求和运算,并将求和运算后得到的第三和值与预设参数之间的乘积确定为校正后偏距值,通过简单的运算以确定校正后偏距值节约了控制器的算力资源。
38、第二方面,本技术提供了一种自动导引运输车的控制装置,应用于自动导引运输车控制系统,该装置包括:
39、采集模块,用于通过磁导航传感器采集自动导引运输车的当前偏距值;当前偏距值用于指示当前自动导引运输车偏离导引路径中磁条中心线的距离与方向;磁导航传感器安装在自动导引运输车上;
40、校正模块,用于基于预设比例积分微分控制算法,对当前偏距值进行校正,得到校正后偏距值;
41、计算模块,用于根据校正后偏距值,进行导航纠偏计算,得到导航纠偏结果;
42、控制模块,用于根据导航纠偏结果,控制自动导引运输车的行驶。
43、第三方面,本技术提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述自动导引运输车的控制方法。
44、第四方面,本技术提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述自动导引运输车的控制方法。
45、第五方面,本技术提供了一种计算机程序产品或计算机程序,所述计算机程序产品或计算机程序包括计算机指令,所述计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质中读取所述计算机指令,处理器执行所述计算机指令,使得所述计算机设备执行上述自动导引运输车的控制方法。
- 还没有人留言评论。精彩留言会获得点赞!