无人机控制方法、装置、设备及存储介质与流程
本技术涉及无人机,尤其涉及一种无人机控制方法、装置、设备及存储介质。
背景技术:
1、无人机(unmanned aerial vehicle,uav)是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
2、目前,随着无人机技术的快速发展,电力线路、管道的巡检任务渐渐由无人机取代。现有技术中公开了一种无人机模拟蛙跳的工作方式,通过在待巡检区域开阔地带选择可靠位置安装固定式机库,使得无人机在执行巡检任务的过程中,若检测到动力电池的电量不足,可自主降落在沿线的机库进行充电,或返回到原出发机库进行充电。在无人机充电完成后,再自动起飞,执行原巡检任务,实现远距离无人干预的全自主巡检线路。
3、但是,现有技术中无人机自主巡检的技术方案多为针对单个无人机的控制方法,缺少对多个无人机协同控制,提高无人机群巡检效率的技术方案。
技术实现思路
1、本技术提出一种无人机控制方法、装置、设备及存储介质,用于实现对多个无人机的协同控制,提高无人机群的巡检效率。
2、为了达到上述目的,本技术采用如下技术方案:
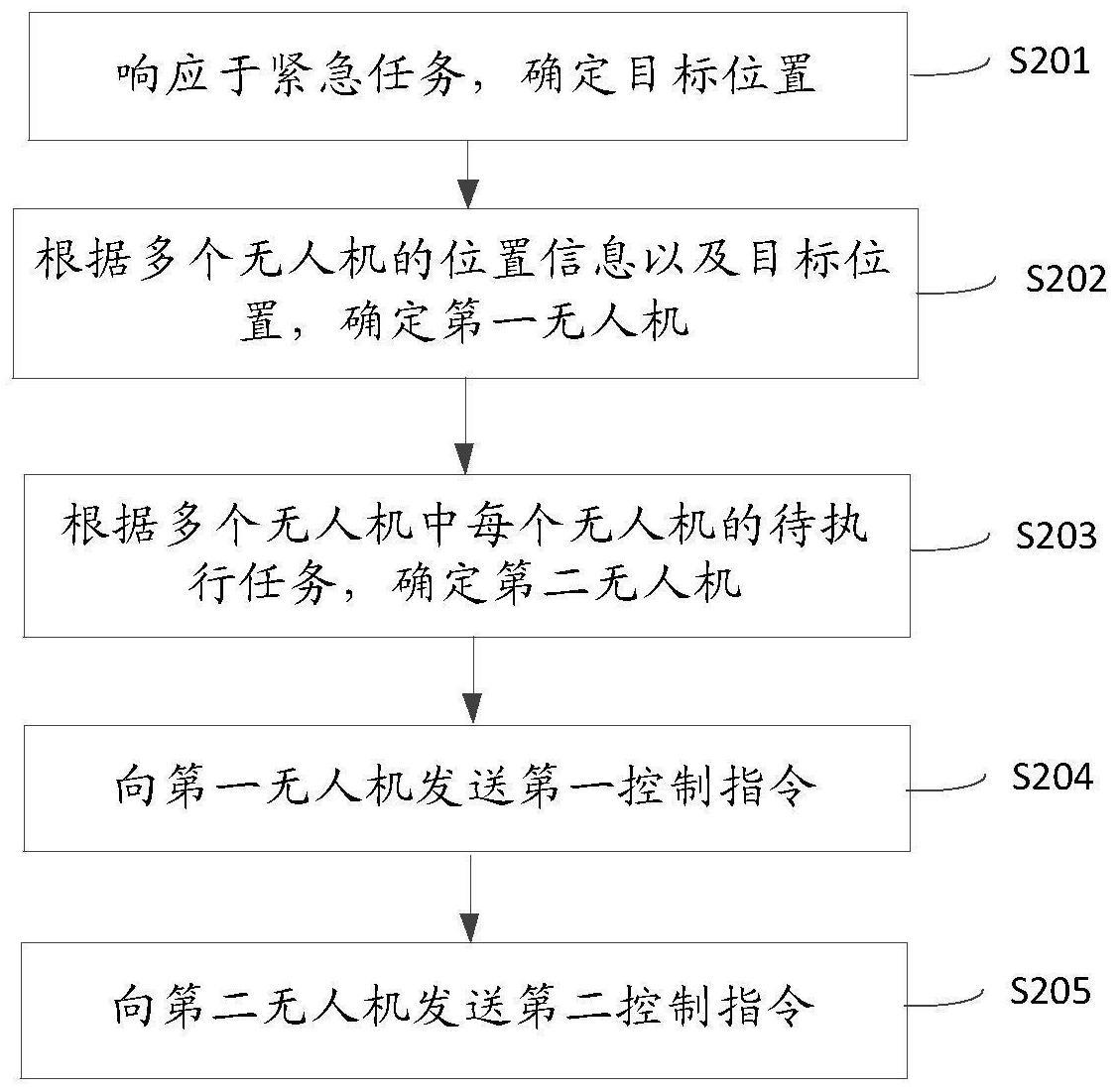
3、第一方面,提供无人机控制方法,应用于无人机控制系统的无人机控制装置,无人机控制系统还包括无人机群,无人机群包括用于执行巡检任务的多个无人机。该无人机控制方法包括:无人机控制装置响应于紧急任务,确定目标位置,目标位置为紧急任务对应的任务位置;并根据多个无人机的位置信息以及目标位置,确定第一无人机,第一无人机为多个无人机中与目标位置距离最近的无人机。进一步的,无人机控制装置根据多个无人机中每个无人机的待执行任务,确定第二无人机,第一任务位置与目标位置之间的距离小于预设距离,第一任务位置为第二无人机的待执行任务对应的任务位置。进一步的,无人机控制装置向第一无人机发送第一控制指令,并向第二无人机发送第二控制指令;第一控制指令用于指示第一无人机前往目标位置执行紧急任务,并在紧急任务完成后,前往第一任务位置执行第二无人机的待执行任务,第二控制指令用于指示第二无人机返航。
4、一种可能的设计中,上述无人机控制系统还包括多个机库,多个机库中的每个机库用于为无人机群中的无人机充电。上述无人机控制装置根据多个无人机的位置信息以及目标位置,确定第一无人机,还包括:无人机控制装置根据多个机库的位置信息以及目标位置,确定目标机库,目标机库为多个机库中与目标位置距离最近的机库;并确定多个无人机中每个无人机对应的待飞行时长;待飞行时长为第一时长与第二时长的和,第一时长为无人机执行紧急任务所需的时长,第二时长为无人机执行紧急任务后前往目标机库所需的时长。进一步的,无人机控制装置根据多个无人机中每个无人机的剩余电量,确定每个无人机的可运行时长;并根据多个无人机中每个无人机对应的待飞行时长,以及每个无人机的可运行时长,确定至少一个第三无人机,第三无人机的可运行时长大于第三无人机对应的待飞行时长。进一步的,无人机控制装置根据至少一个第三无人机的位置信息以及目标位置,确定第一无人机,第一无人机为至少一个第三无人机中与目标位置距离最近的无人机。
5、一种可能的设计中,上述无人机控制方法还包括:无人机控制装置向第一无人机发送第三控制指令,第三控制指令用于指示第一无人机完成执行紧急任务以及第二无人机的待执行任务后,前往目标机库充电。进一步的,无人机控制装置在第一无人机的剩余电量大于预设电量的情况下,向第一无人机发送第四控制指令,第四控制指令用于指示第一无人机恢复原有飞行策略。
6、一种可能的设计中,在第一无人机存在待执行任务的情况下,上述无人机控制方法还包括:无人机控制装置确定第二任务位置,第二任务位置为第一无人机的待执行任务对应的任务位置;并向第二无人机发送第五控制指令,第五控制指令用于指示第二无人机前往第二任务位置执行第一无人机的待执行任务。
7、第二方面,提供一种无人机控制装置,部署于无人机控制系统,无人机控制系统还包括无人机群,无人机群包括用于执行巡检任务的多个无人机;无人机控制装置包括确定单元以及发送单元。确定单元用于响应于紧急任务,确定目标位置,目标位置为紧急任务对应的任务位置。确定单元还用于根据多个无人机的位置信息以及目标位置,确定第一无人机,第一无人机为多个无人机中与目标位置距离最近的无人机。确定单元还用于根据多个无人机中每个无人机的待执行任务,确定第二无人机,第一任务位置与目标位置之间的距离小于预设距离,第一任务位置为第二无人机的待执行任务对应的任务位置。发送单元用于向第一无人机发送第一控制指令,第一控制指令用于指示第一无人机前往目标位置执行紧急任务,并在紧急任务完成后,前往第一任务位置执行第二无人机的待执行任务。发送单元还用于向第二无人机发送第二控制指令,第二控制指令用于指示第二无人机返航。
8、一种可能的设计中,无人机控制系统还包括多个机库,多个机库中的每个机库用于为无人机群中的无人机充电。确定单元还用于根据多个机库的位置信息以及目标位置,确定目标机库,目标机库为多个机库中与目标位置距离最近的机库。确定单元还用于确定多个无人机中每个无人机对应的待飞行时长;待飞行时长为第一时长与第二时长的和,第一时长为无人机执行紧急任务所需的时长,第二时长为无人机执行紧急任务后前往目标机库所需的时长。确定单元还用于根据多个无人机中每个无人机的剩余电量,确定每个无人机的可运行时长。确定单元还用于根据多个无人机中每个无人机对应的待飞行时长,以及每个无人机的可运行时长,确定至少一个第三无人机,第三无人机的可运行时长大于第三无人机对应的待飞行时长。确定单元还用于根据至少一个第三无人机的位置信息以及目标位置,确定第一无人机,第一无人机为至少一个第三无人机中与目标位置距离最近的无人机。
9、一种可能的设计中,发送单元还用于向第一无人机发送第三控制指令,第三控制指令用于指示第一无人机完成执行紧急任务以及第二无人机的待执行任务后,前往目标机库充电。发送单元还用于在第一无人机的剩余电量大于预设电量的情况下,向第一无人机发送第四控制指令,第四控制指令用于指示第一无人机恢复原有飞行策略。
10、一种可能的设计中,在第一无人机存在待执行任务的情况下,确定单元还用于确定第二任务位置,第二任务位置为第一无人机的待执行任务对应的任务位置。发送单元还用于向第二无人机发送第五控制指令,第五控制指令用于指示第二无人机前往第二任务位置执行第一无人机的待执行任务。
11、第三方面,提供了一种无人机控制设备,该无人机控制设备包括存储器和处理器;存储器和处理器耦合,该存储器用于存储计算机程序代码,该计算机程序代码包括计算机指令,当处理器执行该计算机指令时,该无人机控制设备执行如第一方面或其任一种可能的设计提供的无人机控制方法。
12、第四方面,提供了一种计算机可读存储介质,计算机可读存储介质中存储有指令,当指令在无人机控制设备上运行时,使得该无人机控制设备执行如第一方面或其任一种可能的实现方式提供的无人机控制方法。
13、第五方面,提供一种计算机程序产品,计算机程序产品包括计算机指令,当计算机指令在无人机控制设备上运行时,无人机控制设备能够执行如第一方面或其任一种可能的实现方式提供的无人机控制方法。
14、在本技术提供的无人机控制方法中,无人机控制装置接收到紧急任务后,首先确认紧急任务的任务位置,并进一步基于任务位置确定距离最近的第一无人机,以及原有任务的任务位置最接近的第二无人机,指示第一无人机前往紧急任务的任务位置执行紧急任务,以及第二无人机的原有任务,指示第二无人机返航,提高了紧急任务的处理效率,基于对多个无人机的协同控制,减少了资源的浪费。
- 还没有人留言评论。精彩留言会获得点赞!