基于多源感知信号的智能无人车配送方法
本发明涉及无人配送车,具体地说,涉及一种基于多源感知信号的智能无人车配送方法。
背景技术:
1、目前,基于多源感知信号的智能无人车配送方案目前正处于快速发展的阶段,一些物流公司和零售商始尝试利用智能无人车实现配送。例如,amazon和星巴克已经开始测试无人车送货和咖啡等物品的配送服务;顺丰速运、京东物流、菜鸟网络等物流企业也在积极探索无人车配送的应用。
2、现有也有很多关于无人配送车的技术,例如,公开号为cn113570309b的专利公开了一种基于物联网技术的无人驾驶配送车智慧管理系统及其实现方法,通过设置多个无人配送车对应的物联网采集器获取无人配送车的行驶信息和配送信息,将获取的信息发送给各区域的区域管理节点;通过区域信息整合和无人配送车辆驾驶作业强度数据统计,实现无人配送车辆行驶配额管理。车辆在无人配送车智能系统管理层实现,在无人配送车智能管理系统平台端进行系统综合管理和相关操作指令的下发。通过四层架构的无人配送车智能管理,实现无人配送车网络切片管理,为每个区域设置差异化管理指令,基于无人配送的指令池管理模式车辆智能管理系统平台端,提升系统综合管控能力,提高管理效率。并达到更好的无人配送车辆管理系统性能水平。
3、例如,公开号为cn106897855b的专利公开了一种智能无人配送车和无人配送系统,包括通信模块、行走模块、定位模块、监控模块、控制模块和存储模块。储存装置用于储存被投递物件,并设有称重模块。称重模块获取投递物品的重量,与投递建立对应关系地址,如果送达的物品与送达地址不符,则给出警告信息。该无人送货车具有提高送货地址匹配准确度的技术效果。
4、基于多源感知信号的智能无人车配送方案可以从多个方面进行设计和实现,下面列举一些常见的方案以及它们的缺陷:
5、感知技术:无人车需要通过各种感知技术获取周围环境信息,包括雷达、摄像头、激光雷达等,以便进行路径规划和障碍物避让等操作。缺陷包括:感知技术的准确度和可靠性需要进一步提高,同时感知设备的成本较高,对商业化运营造成一定的压力。
6、路径规划和决策:无人车需要通过算法进行路径规划和决策,以便实现最优路径和安全的行驶。这需要考虑到交通流量、道路状况、障碍物等因素。缺陷包括:算法的准确度和效率需要进一步提高,同时在复杂的交通环境中,无人车的决策可能会受到不确定性的影响。
7、通信技术:无人车需要与其他车辆、交通信号灯、路边设施等进行通信,以便获取实时交通信息并调整行驶策略。缺陷包括:通信技术的可靠性需要进一步提高,同时通信设备的成本也较高。
技术实现思路
1、本发明的内容是提供一种基于多源感知信号的智能无人车配送方法,其能够更高效地完成配送任务。
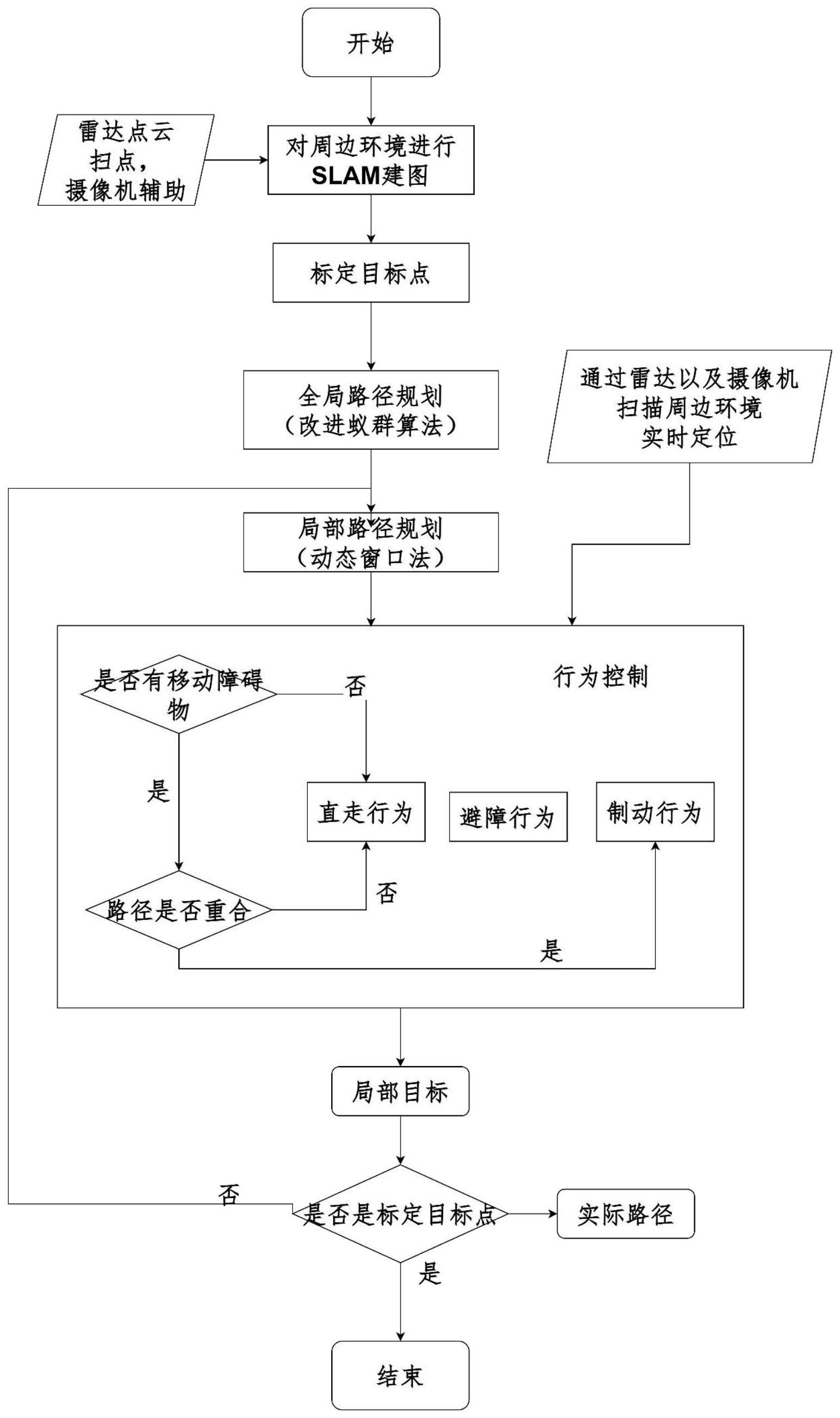
2、根据本发明的一种基于多源感知信号的智能无人车配送方法,其包括以下步骤:
3、1)根据车载传感器获取车辆周围环境信息,完成车辆的自身定位,并构建点云地图;
4、2)采用改进的蚁群算法规划出全局最优路径;
5、3)利用车载传感器实时更新障碍物信息,并将信息融进栅格地图中,利用动态窗口法完成局部避障;
6、4)基于全局规划路径,实时设置局部目标点,采用预瞄追踪法根据路径规划过程中的控制参数追踪目标点,实现车辆的实时避障,获取局部最优路径;
7、5)判断当前追踪到的目标点是否是最终目标点,若不是,则跳转到之前的外部环境信息获取继续前进,若是,则智能车到达了最终目标点。
8、作为优选,步骤1)中,构建点云地图的具体步骤如下:
9、1.1)使用ros进行映射,启动lcshadow_driver和fslidar_front节点;
10、1.2)在实际场景中手动移动lcshadow车辆,让lcshadow_driver和fslidar_front节点与car-tographer_node通信,传输获取到的车辆运行状态信息;
11、1.3)lcshadow_driver、robot_state_publisher、cartographer_node发布tf主题来传递车辆的位姿信息;
12、1.4)tf主题向cartographer_node提供实时姿态信息,并将该信息传递给n_rviz,在rviz界面显示车辆的实时位置;
13、1.5)cartographer_node根据车辆的状态和位姿信息构建地图,并发布submap_list、landmark_poses_list、scan_matched_points2和trajectory_node_list主题作为建图的关键信息;
14、1.6)submap_list主题的信息传递给cartogra-pher_occupancy_grid_node,建立slam地图。
15、作为优选,在建图过程中,在rviz中可视化lcshadow车辆和激光雷达扫描图像;lcshadow车辆应在实际环境中行走3次,以确保所有障碍物都准确反映在slam地图中;随着车辆的移动,slam地图会不断更新;完成环境映射后,在ros中运行停止映射命令,将构建好的slam地图保存到指定路径。
16、作为优选,步骤2)中,改进的蚁群算法具体如下特点:
17、2.1)采用改进的启发式函数nij(t)给定蚁群一个初步的指导方向:
18、nij(t)=1/(σ·lij+(1-σ)·lje)2
19、其中,σ∈[0,1],是用来表示lij与lie对nij的影响程度的常数,由实时环境确定,lij表示节点i到节点j之间距离,lie表示节点i到目标点e之间的距离;
20、2.2)采用混合策略来更新信息素
21、对最大值tmax和最小值tmin进行确认:
22、
23、其中ds为某次迭代之后蚁群走过的最优路径长度,n为循环次数;
24、每结束一次循环,路径上信息素会发生变化,因此采用如下方式对信息素进行调整:
25、tig(t+1)=(1-λ)·tij(t)+δtij(t)
26、
27、
28、tij(t)表示t时刻的信息素含量;λ表示信息素的挥发系数,λ∈[0,1],δtij(t)表示节点i到节点j之间的信息素增量,表示蚂蚁c在节点i到j之间的信息素增量,m∈[1,50],为蚂蚁数量;rs表示目前找到的最优解;
29、2.3)采用三次b样条曲线平滑路径。
30、作为优选,步骤3)中,动态窗口法的实现过程如下:
31、3.1)确定机器人的当前状态,包括位置、朝向、速度;
32、3.2)根据机器人的状态和环境信息,计算机器人可采取的速度和转角的范围,即确定速度-转角空间中的动态窗口;
33、3.3)在动态窗口内进行采样,得到一组速度-转角的组合;对于每个组合,都可计算出机器人在下一个时间步中的位置和姿态;根据机器人的运动学模型和环境信息,筛选出可行的速度-转角组合;
34、3.4)对于所有可行的速度-转角组合,计算出每个组合对应的代价函数;
35、3.5)选择代价函数最小的速度-转角组合作为机器人的下一步移动方案;
36、3.6)重复以上步骤,直到机器人到达目标点或者无法找到可行解为止。
37、作为优选,步骤4)中,预瞄追踪法的具体步骤如下:
38、4.1)确定车辆的运动模型;
39、4.2)设定目标轨迹;
40、4.3)预测车辆未来的轨迹:根据车辆的运动模型和当前状态,预测车辆未来的轨迹;
41、4.4)计算控制指令:根据车辆的当前状态和预测的轨迹,计算出需要施加到车辆上的控制指令;
42、4.5)执行控制指令:将计算出的控制指令实施到车辆上,控制车辆沿着目标轨迹行驶;
43、4.6)实时调整:根据车辆的实际运动和环境变化,实时调整预测模型和控制指令。
44、本发明设计了一种基于多源感知信号的智能无人车配送方法,并对其路径优化算法进行了改进,使其能够更高效地完成配送任务。该智能无人车配送方法可在无人监控的情况下完成配送任务,特别适用于医疗酒店等需要防止传染或保护隐私的场景。
- 还没有人留言评论。精彩留言会获得点赞!