四旋翼无人机抗饱和及干扰的位置和姿态跟踪控制方法
本发明涉及一种四旋翼无人机抗饱和及干扰的位置和姿态跟踪控制方法,属于四旋翼无人机的飞行控制。
背景技术:
1、近十年以来,四旋翼无人机由于其成本低廉、高机动性、扩展性强等优点在飞行航拍、物流搬运、火灾救援、地震搜救等各行各业得到了越来越广泛的应用。然而,四旋翼无人机是典型的欠驱动、非线性系统,且在空中飞行时容易受到输入饱和问题和未知时变干扰的影响。因此,设计一种抗饱和抗干扰高性能四旋翼无人机飞行控制器是一项具有挑战性的课题。
2、目前已经有许多控制方法在四旋翼无人机上得到了应用,比如pid控制、模型预测控制、滑模控制等等。此外,目前的抗饱和控制主要分为辅助系统法、双曲正弦函数逼近法、基于齐次性理论的有界控制器设计法,但前两种方法只能保证控制系统有界,最后一种方法很难获得光滑的期望欧拉角。
3、文(tang p,zhang f,ye j,et al.an integral tsmc-based adaptive fault-tolerant control for quadrotor with external disturbances and parametricuncertainties[j].aerospace science and technology,2021,109:106415.)针对四旋翼系统的外部干扰、参数不确定性和执行器故障,提出了一种基于有限时间精确观测器和多变量积分终端滑模控制不需要故障诊断机制的有限时间容错轨迹跟踪控制方法。文(huangd,huang t,qin n,et al.finite-time control for a uav system based on finite-time disturbance observer[j].aerospace science and technology,2022,129:107825.)研究了受输入饱和与外界干扰影响的无人机系统的有限时间控制问题,设计了一种辅助系统来补偿输入饱和效应,开发了一种快速终端滑模控制器来实现无人机的轨迹跟踪控制/稳定。但以上结果均没有综合考虑四旋翼无人机外环和内环的抗干扰设计,且只能得到闭环系统有界的结论。
技术实现思路
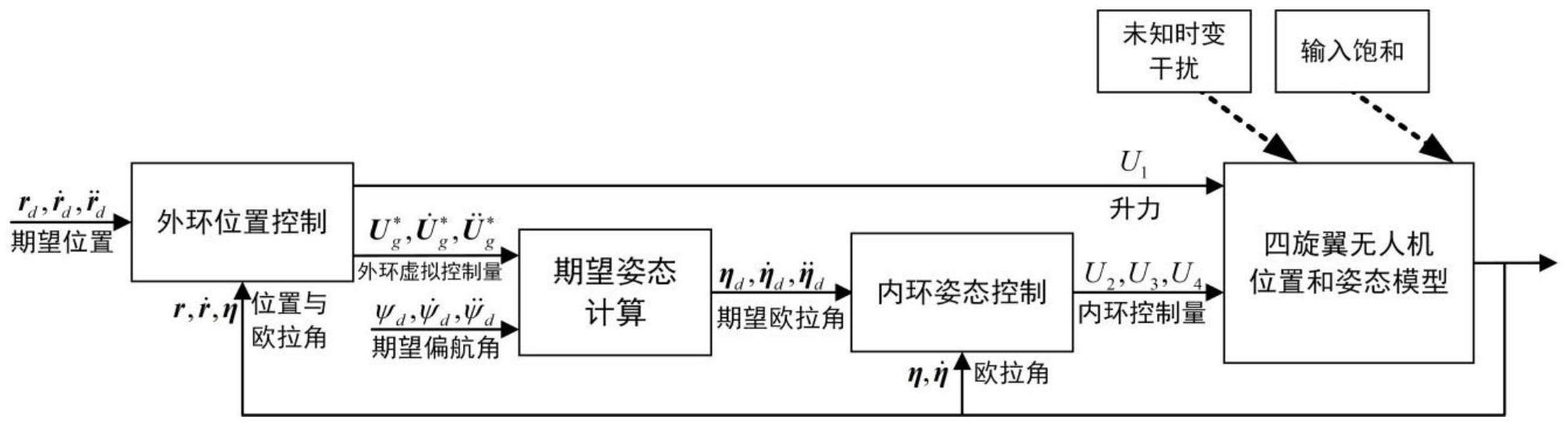
1、考虑到四旋翼无人机系统的欠驱动、非线性以及易受未知时变干扰、输入饱和问题影响的特征,本发明提供一种四旋翼无人机抗饱和及干扰的位置和姿态跟踪控制方法,是一种将有限时间干扰观测器和反步控制方法相结合的复合抗饱和抗干扰位置和姿态跟踪控制方法,使四旋翼无人机系统具有渐近跟踪性能和强抗饱和抗干扰性能。
2、本发明为解决上述技术问题采用以下技术方案:
3、本发明提供一种四旋翼无人机抗饱和及干扰的位置和姿态跟踪控制方法,包括以下步骤:
4、步骤一:考虑输入饱和与未知时变干扰,基于牛顿-欧拉方法建立四旋翼无人机外环位置和内环姿态综合模型;
5、所述四旋翼无人机外环位置和内环姿态综合模型为:
6、
7、
8、
9、
10、其中:r=[x y z]t表示四旋翼无人机在惯性坐标系下的位置,x、y、z分别为x、y、z轴位置;rd=[xd yd zd]t表示四旋翼无人机在惯性坐标系下的期望位置,xd、yd、zd分别为x、y、z轴期望位置;re=[xe ye ze]t=r-rd表示四旋翼无人机位置误差;v=[vx vy vz]t表示四旋翼无人机在惯性坐标系下的速度,vx、vy、vz分别为x、y、z轴速度;m1=-ctv/m,m表示四旋翼无人机的质量,ct=diag{ctx cty ctz}表示四旋翼无人机阻力系数矩阵,ctx,cty,ctz>0;表示四旋翼无人机在惯性坐标系下的外环虚拟控制量,分别为x、y、z轴虚拟控制量,考虑输入饱和问题,对及i=1,2,3,需满足其中分别为给定的下界和上界;d1=[d11 d12 d13]t表示四旋翼无人机在惯性坐标系下外环所受到的未知时变干扰,d11、d12、d13分别作用在x、y、z轴;ug=[ug1 ug2 ug3]t表示四旋翼无人机在惯性坐标系下的外环实际控制量,ug1、ug2、ug3分别为x、y、z轴实际控制量;η=[φ θ ψ]t表示四旋翼无人机在惯性坐标系下的欧拉角,其中φ、θ、ψ分别为滚转角、俯仰角及偏航角;ηd=[φd θd ψd]t表示四旋翼无人机在惯性坐标系下的期望欧拉角,其中φd、θd、ψd分别为期望滚转角、期望俯仰角及期望偏航角,φd与θd通过与ψd计算得到:g表示当地重力加速度;ηe=η-ηd表示四旋翼无人机姿态误差;ω=[ωx ωy ωz]t表示四旋翼无人机在机体坐标系下的角速度,其中ωx、ωy、ωz分别为绕x、y、z轴角速度;其中j=diag{jxx jyy jzz}表示四旋翼无人机惯性矩阵,jxx,jyy,jzz>0;表示ω的反对称矩阵;ua=[ua1 ua2 ua3]t表示四旋翼无人机在机体坐标系下的内环控制量,ua1、ua2、ua3分别为x、y、z轴控制量,考虑输入饱和问题,对及i=1,2,3,uai需满足其中分别为给定的uai下界和上界;d2=[d21 d22d23]t表示四旋翼无人机在机体坐标系下内环所受到的未知时变干扰,d21、d22、d23分别作用在x、y、z轴;
11、步骤二:构建两个有限时间干扰观测器分别估计外环和内环未知时变干扰;
12、采用如下有限时间干扰观测器对外环干扰d1进行估计
13、
14、
15、
16、
17、其中,λi=diag{λi1 λi2 λi3},i=1,2,3,4,λij>0,j=1,2,3为观测器增益,l1=diag{l11 l12 l13},l1i>0,i=1,2,3为已知的lipschitz常数。z1,z2,z3,z4分别为v,d1,的估计值,令
18、采用如下有限时间干扰观测器对内环干扰d2进行估计
19、
20、
21、
22、
23、其中λi=diag{λi1 λi2 λi3},i=5,6,7,8,λij>0,j=1,2,3为观测器增益,l2=diag{l21 l22 l23},l2i>0,i=1,2,3为已知的lipschitz常数。z5,z6,z7,z8分别为ω,d2,的估计值,令
24、步骤三:基于观测到的内外环干扰估计值,结合反步控制方法,设计内外环复合抗饱和抗干扰跟踪控制器,所述内外环复合抗饱和抗干扰跟踪控制器包括外环抗饱和抗干扰跟踪控制器和内环抗饱和抗干扰跟踪控制器;
25、所述外环抗饱和抗干扰跟踪控制器为:
26、
27、其中由以下超螺旋微分器获得:
28、
29、
30、其中为的lipschitz常数,在应用中选取足够大即可。分别为的估计值。
31、所述内环抗饱和抗干扰跟踪控制器如下:
32、
33、其中
34、
35、
36、
37、由以下超螺旋微分器获得:
38、
39、
40、其中为的lipschitz常数,在应用中选取足够大即可。分别为的估计值。
41、技术效果
42、本发明提出的技术方案相比于已有的技术,产生下述技术效果:
43、(一)综合考虑四旋翼无人机内外环输入饱和与未知时变干扰,能够在内外环控制器抗饱和以及抗干扰设计前提下生成光滑的期望欧拉角,具有通用性。
44、(二)将有限时间干扰观测器和反步控制方法相结合,设计的复合抗饱和抗干扰控制器可以有效处理未知时变干扰与输入饱和问题对控制系统造成的负面影响,使位置误差与姿态误差能够渐近收敛到0。
45、(三)本发明所提出的复合抗饱和抗干扰控制技术思想可同样用于其他需要抗饱和抗干扰处理的控制系统设计中,具有广阔的应用前景。
- 还没有人留言评论。精彩留言会获得点赞!