一种支持PLC及PLC下位电气元器件的测试方法与流程
本发明涉及新能源换电,尤其涉及一种支持plc及plc下位电气元器件的测试方法。
背景技术:
1、plc是指可编程逻辑控制器,它是一种常用于工业自动化控制领域的数字电子设备。在电动汽车换电站中,plc通常被用来控制电池更换机器人等设备,以实现自动化的电池更换过程。plc可以通过编程来实现各种不同功能的控制,比如电池状态监测、电池更换、充电控制等等。使用plc控制的自动化系统可以提高效率和安全性,并且避免了人工操作错误带来的风险。电动汽车换电站是一个快速兴起的行业产品,目前在换电站领域存在较多的技术挑战,在电动汽车换电站测试技术领域,在换电站全部结构件组装完成后,plc工程师需要对换电流程进行调试,待调试结束后测试工作才能介入,并且整个测试调试过程中,面临着时间周期的成本控制,并不能很好的对换电站每个细节进行全覆盖测试,因此投入运营后,主要面临以下几个问题。
2、1、电动汽车换电站整站的测试偏向于静态,在其结构、布线等设计的检验检测均以静态测试为主,虽然也存在执行结构上的动态验证调试,但由于其时间段、次数低、覆盖范围狭窄,导致在换电站实际处于运营阶段后,爆发出大量的结构可靠性异常;
3、2、由于在生产阶段并未进行长时间稳定性测试,在实际投入运营后,面临着结构连接件的松动等异常;
4、3、目前很多换电站加入了电池视觉定位,便于精准定位出车辆的电池位置,方便后续的拆卸安装动作,虽然电池的视觉定位系统有过独立的稳定性以及识别准确度上的测试,但大部分的测试脱离了实际的运行场景,电池视觉定位系统并未结合plc换电硬件的联动,那么在实际运营过程中也会面临着精准度、稳定性等方面的风险
5、4、在plc完成程序编码后,plc的研发需介入调试,调试完成后,plc的上位侧也需要进行联调,整个过程被拉长,耗时耗力。
技术实现思路
1、本发明旨在提供一种支持plc及plc下位电气元器件的测试方法克服上述问题或者至少部分地解决上述问题。
2、为达到上述目的,本发明的技术方案具体是这样实现的:
3、本发明的提供了一种支持plc及plc下位电气元器件的测试方法,包括以下步骤:
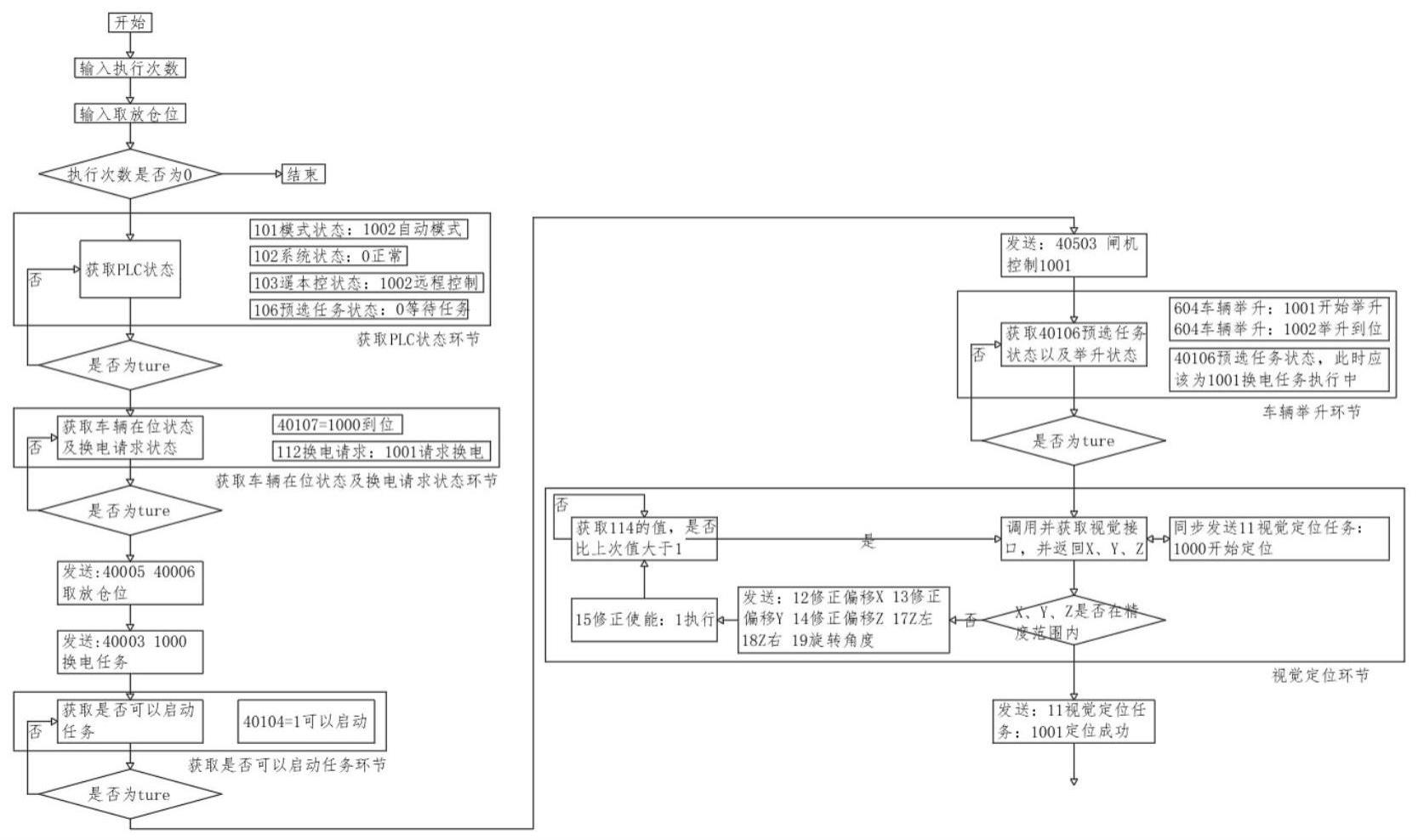
4、步骤一,输入执行次数和输入电池包的取放仓位号,在plc程序开始执行后,将执行次数和电池包的取放仓位号下发给plc控制器,控制电池更换机器人将拆卸的电池放置指定的仓位号和从指定的仓位号取出新电池,在后面的循环中,电池包的取放仓位在前一个循环的基础上累加1,在达到最大仓位后从1开始继续累加。
5、步骤二,判断步骤一的执行次数是否为0,如果为0,则方法终止;如果不为0,则进入获取plc状态环节,并通过读取对外协议定义的plc状态,来对plc状态条件进行判断,如果条件有一个不满足,则等待n秒后检查,如果还不满足,则方法终止;如果满足,此时将测试车辆行驶至换电站换电指定区域。
6、步骤三,在车辆行驶至换电站换电指定区域后,获取车辆在位状态及换电请求状态分别是否为到位和请求换电,如果不满足,则等待n秒后检查,如果还不满足,则方法终止;如果满足,则将输入的取放仓位号基于plc对外定义协议中的取放仓指令下发至plc,并基于协议定义的启动任务指令下发任务类型为换电任务类型至plc。
7、步骤四,在下发成功后,基于plc对外定义的是否可以启动任务指令,检查plc是否可以启动,如果条件不满足,则等待n秒后检查,如果还不满足,则方法终止;如果满足,则此时再根据plc对外定义的协议指令获取预选任务状态以及举升状态。
8、步骤五,在任务指令满足plc启动的条件,举升状态会先输出开始举升,等待一会为举升到位,此时可以观察电池更换机器人的举升结构是否正在做对应的动作;如果条件有一个不满足,则等待n秒后检查,如果还不满足,则方法终止。
9、步骤六,待举升到位后,预选任务状态开始任务执行,通过调用电池包视觉定位系统对外的接口,触发电池包视觉定位系统对外定义的启动定位接口,开始让视觉定位系统开始对电池包进行定位,待电池包定位精度满足要求后,基于plc对外定义的协议下发给plc,此时电池更换机器人将开始执行拆卸安装电池等操作,整个过程可以观察电池更换机器人的换电结构是否正在做对应的动作,并检查动作执行过程中是否会受到其它结构件的空间影响。
10、步骤七,待换电过程状态变成换电完成后,获取plc对外定义的协议指令获取举升状态,检查举升状态是否由举升完成状态变成开始回落状态到最终的回落到位状态,在举升状态变成回落到位状态后,获取基于plc对外协议定义的换电结束请求状态指令是否变成换电结束,如果没有则等待n秒后检查,如果还不满足,则方法终止,如果换点结束请求状态变成换电结束,则表示电池更换机器人已经完成了一次换电操作,此时检查取放仓位是否为最大仓位号,如果不是则自加1,如果是则变成1,继续从步骤2开始循环执行。
11、作为本发明进一步的方案,所述测试方法包括输入、控制逻辑以及输出,且测试方法的输入包括执行次数和电池包的取放仓位号,所述执行次数为本次执行方法中需要电池更换机器人执行电池更换动作的总次数,所述电池包的取放仓位号为起始仓位号。
12、作为本发明进一步的方案,所述执行次数控制着整个电池更换逻辑的执行次数,在执行次数归零时,测试方法结束,所述电池包的取放仓位号设置,目的是让首次电池更换逻辑触发时,给plc控制逻辑下发电池包的取放仓位置,在后续的电池更换逻辑中进行自加一,在达到仓位最大位置后,自动从一开始累加。
13、作为本发明进一步的方案,所述测试方法的输出是通过控制plc电池更换机器人来实现电池状态监测、电池更换和充电控制自动化。
14、作为本发明更进一步的方案,所述在测试方法以及每个结构的自动化执行过程中,通过观察每个结构在运动机构运动过程中是否存在干扰,检查布线是否合理,是否被运动结构磨损,检查仓位设计的是否合理以及检查连接件是否存在松动情况,在执行过程中,检查对外协议是否一致,输出换电成功和失败次数,对于电池视觉定位系统,则输出电池视觉定位准确率、每次识别的耗时。
15、作为本发明更进一步的方案,所述测试方法中的控制逻辑主要为基于对外协议,向plc控制器下发电池更换机器人的控制指令以及监听电池更换机器人每个动作的执行结果。
16、作为本发明更进一步的方案,所述plc状态包括plc当前是否是自动模式、系统状态是否正常、是否为远程控制、当前预选任务状态是否处于等待状态。
17、作为本发明更进一步的方案,在步骤六中,所述视觉定位系统定位成功后,会获取到电池包在x、y、z三个方向的偏移量,并根据定位的结果判断x、y、z三个方向的偏移量是否在允许的精度范围内,如果不在范围内,则根据plc对外协议定义的修正偏移指令下发视觉定位系统返回的x、y、z三个偏移量,再向plc下发定义好的修正使能指令,使plc控制器控制电池更换机器人在x、y、z三个方向进行移动,此时可以通过修正前后的偏移值计算出plc实际修正距离,再和视觉定位系统的值进行对比,判断出视觉的识别精度或plc在x、y、z三个方向的修正精度;
18、修正完成后再触发电池包视觉定位系统对外定义的启动定位接口,并重复以上步骤六的内容,如果连续调用视觉定位接口超过指定次数还不满足精度要求,则终止方法,并做记录;
19、若视觉定位系统在x、y、z三个方向的偏移量满足精度要求后,则基于plc对外协议定义的定位成功指令下发至plc,此时电池更换机器人将开始执行拆卸安装电池等操作,并获取根据协议定义的换电过程状态,整个过程可以观察电池更换机器人的换电结构是否正在做对应的动作,并检查动作执行过程中是否会受到其它结构件的空间影响。
20、作为本发明更进一步的方案,所述换电过程状态包括电池拆卸中、电池入库搬运中、电池出库搬运中、电池安装中以及换电完成。
21、本发明提供了一种支持plc及plc下位电气元器件的测试方法,有益效果在于:能够实现在换电站结构件全部组装完成后,协助plc工程师进行功能上的调试,并且在调试结束后,可以对整个结构件在功能、结构特性、稳定性、视觉定位系统上进行测试,通过以上测试方法,可以有效降低测试时间成本,将测试活动前置到plc调试阶段,并验证协议一致性,提高测试覆盖度并提高整个plc模块的测试效率,而且省时省力,测试成本低。
- 还没有人留言评论。精彩留言会获得点赞!