一种新式光伏支架跟踪方法及系统
本发明涉及光伏支架发电,更具体涉及一种光伏支架跟踪控制技术和发电优化方法。
背景技术:
1、近年来,伴随着全球人口的不断增长和经济社会的快速发展,能源消耗量急剧增加,不可再生资源日益枯竭,其所带来的温室效应与环境污染问题却日趋严重,此消彼长之下,能源与环境问题岌岌可危,成为了制约社会可持续发展的重要问题。因此目前世界各国都在致力于新能源的开发与利用。其中太阳能以其储量大,分布广,清洁安全等独特优势成为了替代传统化石能源的理想选择。
2、目前常见提高太阳能利用效率的方法主要有提高太阳能电池组件的光电转化效率和提高单位面积光伏组件的辐照接收效率两种方法。前一种方法由于受到材料、技术和成本的限制,不适用于商业大面积应用,目前已经达到了技术瓶颈。而针对第二种方法,众多学者已经研究并提出了多种太阳视日运动轨迹算法。
3、常规视日运行轨迹跟踪方法大多采用光电式的思路,该方法依靠光电感应电路,根据太阳光线的变化而驱动支架转动,虽然驱动原理简单易实现,但是对于多云,阴雨天气下太阳光线变化不易检测的环境,该方法就体现出了明显的不足。
4、因此如何设计一种能够抗外界环境干扰,跟踪精度高的光伏支架跟踪方法,提高光伏电站的发电量和发电效率,是有待本领域研究人员急需攻克的重要问题。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、基于光伏支架跟踪方法现存在的一些问题和技术难点,本发明的目的是提供一种新式光伏支架跟踪方法及系统,旨在增加光伏电站的发电总量,提高视日轨迹跟踪技术的跟踪效率以及节省土地的用地面积;
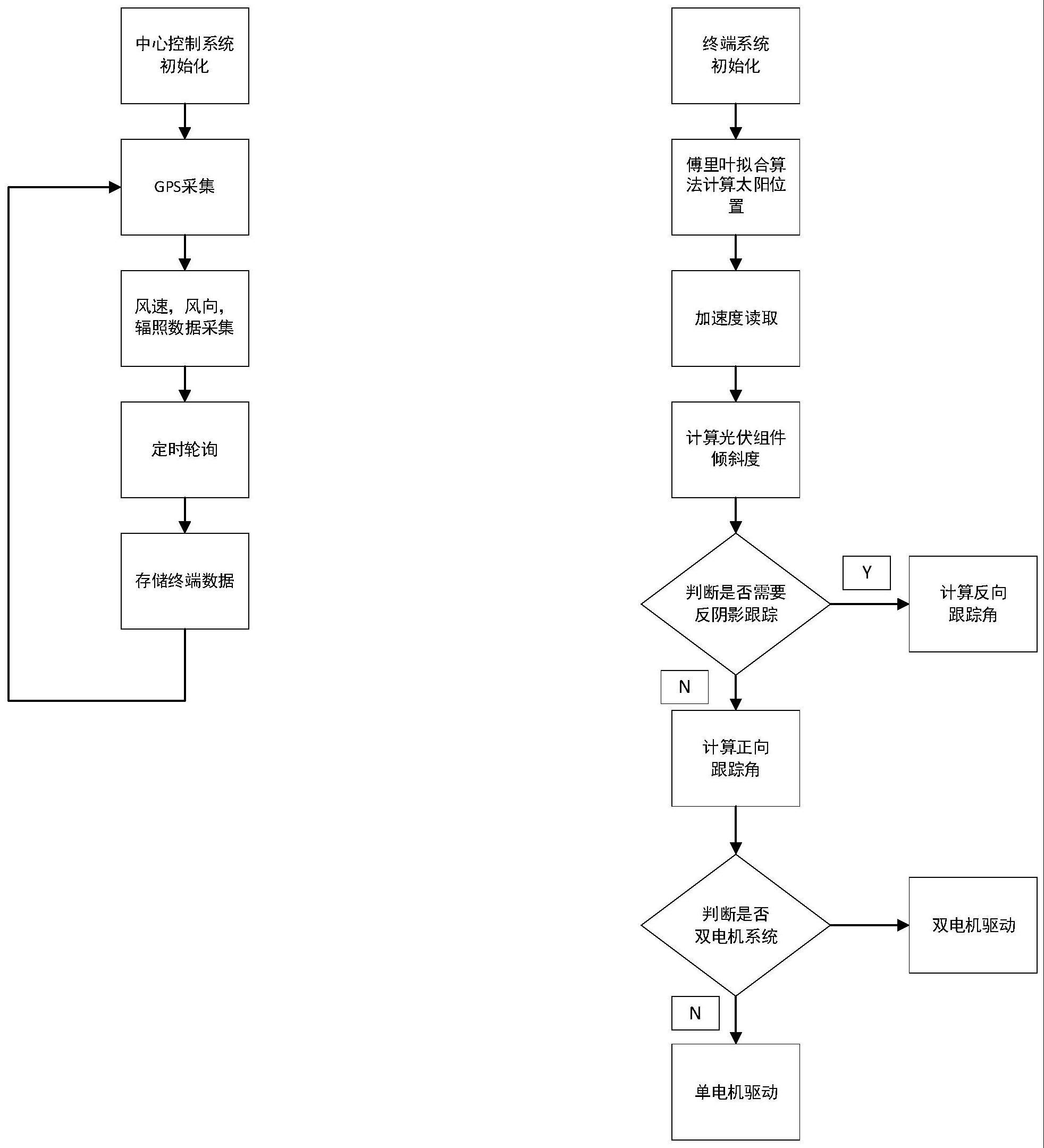
3、为实现上述技术方法,所述的一种新式光伏支架跟踪方法及系统包括如下步骤:
4、由中心向四周,采用星型扩散式排列方式,将该区域光伏支架确定为一个子区域;对处于中心节点位置的设备确立为中心控制系统,其余都为该中心控制系统附属终端系统;
5、中心控制系统根据无线定位模块确定跟踪系统安装地区的经纬度数据和rtc;
6、根据所述经纬度数据和rtc,通过lora(long range radio)433mhz线性调频通讯技术下发至终端系统;
7、终端系统根据该数据,内部采用傅里叶拟合天文算法计算出太阳实时运行轨迹,表达式如下:
8、
9、采用加速度传感器,根据重力矢量在轴上投影的原理,计算出光伏支架的实时倾斜度;
10、分析太阳光线的余弦效应在支架轴上的几何函数关系;建立三维几何光学模型计算得出轴上需要动作的跟踪角度,并控制电机驱动电路进入间歇式持续跟踪运行模式;
11、对所述间歇式持续跟踪运行还包括反阴影跟踪技术,根据设定光伏组件宽度与每排支架之间的间距参数,计算出反向跟踪临界角度,驱动运动单元根据反向跟踪角度驱动,即可实现光伏组件全年无阴影遮挡;
12、对所述电机驱动电路,还包括:在大功率负载的情况下,具有双减速电机采用主从双电机协调驱动算法驱动单根跟踪支架。
13、优选的,所述新式跟踪系统包括终端系统和中心控制系统,具体包括:
14、终端系统作为支架跟踪的驱动系统,用于驱动电机实现视日运动轨迹的持续跟踪运行;
15、中心控制系统作所有终端系统的监控单元,用于检测应对特殊外界环境变化和监控所有终端系统的运行状态。
16、优选的,中心控制器采用无线定位技术,获取经纬度与rtc,所述方法包括:
17、采用bc20 nb-iot模块,通过配置at指令,自动确定支架安装地区的格林尼治时间、日期,经纬度。
18、自动转化为当地真太阳时,用于计算太阳实时位置角度;
19、优选的,中心控制系统与光伏支架各阵列上终端系统采用lora 433mhz线性调频技术进行通讯。所述通讯技术包括以下步骤:
20、对不同节点位置的光伏跟踪支架,通过上位机为该节点终端系统分配系统id以及对该区域光伏支架阵列划分群号。
21、不同id的终端系统在运行过程中,会不断更新自身数据,并将自身运行的各项数据打包成协议帧的格式,存储在内部sram中,包括:光伏组件输出电压、电机驱动电流、锂电池输出电压电流、光伏支架实际运行倾斜度、限位角度、报警标志位等;
22、优选的,所述终端系统内部采用傅里叶拟合算法计算太阳实时运行轨迹,具体方法包括以下步骤:
23、终端系统向中心控制系统注册后,中心控制系统将封装好的经纬度和时间数据下发至终端系统。
24、终端系统在接收到该数据后,采用傅里叶拟合算法进行处理得出太阳赤纬角与时差数据,再以此计算太阳实时高度角和方位角,傅里叶拟合算法表达式如下:
25、
26、式中:a0为直流分量;k为拟合阶数;x为日期序数,如1月6日,x=6;
27、进一步优选的,每隔预设定时周期,更新傅里叶拟合算法结果,对所述太阳实时运行轨迹持续调整,并控制电机驱动电路进入间歇式持续跟踪运行模式;
28、优选的,采用加速度传感器,利用重力矢量在轴上投影的原理,计算出光伏支架的实时倾斜度,实现单/双轴跟踪,具体实现方法包括:
29、进一步地,选取光伏组件在水平状态下的参照点为典型取向,通过基本三角函数可分析得出光伏支架的三轴实时倾斜度,计算公式如下:
30、
31、
32、
33、式中θ为x轴倾斜度;ax,out为x轴加速度值;ay,out为y轴加速度值;az,out为z轴加速度值;η为y轴倾斜度;ψ为z轴倾斜度。
34、优选的,三维几何光学模型计算得出轴上需要动作的跟踪角度,具体实现步骤包括:
35、建立太阳光线与支架之间的三维几何光学模型;
36、对太阳光线的余弦效应做轴上的投影,分析投影与支架之间的几何函数关系;
37、结合支架实时倾斜度,即可通过三维几何函数关系计算出单/双轴的跟踪角度,表达式如下所示:
38、
39、
40、式中:θ1为东西方向上的跟踪角;α为太阳高度角;β为太阳方位角;θ2为南北方向上的跟踪角。
41、优选的,系统采用分布式组网监控的方式,配有人机交互界面(以下简称之为“上位机”),可动态监控支架跟踪运行状态,包括经纬度,时间,实时角度,电机驱动电流等。
42、上位机具有调试功能,可修改控制系统的参数,如设备id,反阴影参数,过流阈值,防风,辐照阈值等。上位机可接入单个终端进行调试,也可接入中心控制器对群体进行调试。
43、进一步地,中心控制系统可手动控制光伏阵列子区域内终端系统集体切换运行模式。
44、优选的,反阴影跟踪功能,具体方法实现包括步骤如下:
45、反阴影跟踪的启动算法以光伏组件的板宽和支架间距为输入对象,当θ+y=90时,为正常跟踪与反向追踪的临界角。
46、根据三角函数关系可得临界角
47、当则开反阴影跟踪,根据其几何关系可计算得到反向跟踪角度:
48、只需驱动电机驱动电路根据反向跟踪角度驱动,即可实现光伏组件全年无阴影遮挡;
49、式中:l为光伏组件的板宽;w为两排支架之间的间距;θ为太阳光线在轴上投影的跟踪角;y为反向跟踪角度。
50、优选的,双减速电机采用主从电机协调驱动算法控制驱动单根跟踪支架,具体包括以下步骤:
51、主从电机上电后通过手动驱动的方式转动二者至近似保持水平的状态,并通过modbus通信协议,将双电机此时加速度传感器测量数据重置为理论零值。
52、以太阳的跟踪角度为目标角度,主从电机通过程序内部角度控制环,将电机在实际转动过程中的转程差为调制基准,若电机运行出现转速不均匀,则通过pwm调节电流环,使电机转速保持一致。
53、设置3°的转程阈值,只有在两个电机同时完成一个转程之后,才可以进行下一次动作,在一定程度上可以降低转程产生的累积误差。
54、优选的,每隔预设定时周期,读取系统运行参数,优化调整系统工作结构,具体包括:
55、通过485接口读取外部风速仪、风向仪和辐照仪数据,根据解析数据,实现在大风天气,做到抗风保护支架;在多云有雨天气,停止支架运行追踪,减少自循环供电系统电力损耗;在有雪天气,做到除雪清理支架表面;
56、优选的,还包括:每隔预设定时周期,系统软复位lora模块,避免无线射频模块可能出现的死机情况;每隔预设定时周期,再次读取gps定位数据并更新数据群发,进一步确保太阳位置计算数据的精确性;
57、本发明的有益效果如下:
58、(1)根据本发明提供的一种新式光伏支架跟踪方法及系统,至少具有以下有益效果:通过采用星型扩散式光伏支架排列组网方式,将该区域光伏支架确定为一个子区域,处于中心位置的确立为中心控制系统,其余支架为该中心控制系统的附属终端系统,在一定的光伏阵列子区域内,能够实现更多的光伏支架安装数量。
59、(2)摒弃目前较多使用的光电式,机械式跟踪方式易受外部环境干扰、跟踪精度低的缺点,系统内部采用傅里叶拟合天文算法,计算太阳实时运行轨迹,通过加速度传感器计算各光伏支架实时运行角度,以此建立光学模型,计算出实时需要动作的跟踪角度,并控制电机使用间歇式跟踪方法转动支架至与太阳光线垂直的位置。
60、(3)在晨昏时刻,采用逆跟踪技术,驱动支架向相反方向转动,避免光伏支架上产生阴影遮挡,在保证了跟踪精度的同时,也提高了土地利用率,同时考虑到大功率机组的应用,提供了双电机支架驱动策略,实现了双电机驱动单轴上更多的光伏组件,有利于提高该光伏子区域的最大发电总量。
- 还没有人留言评论。精彩留言会获得点赞!