本发明涉及室内机器人局部路径规划,尤其是涉及一种针对室内复杂环境的局部路径规划方法、电子设备及介质。
背景技术:
1、路径规划和导航避障是实现机器人其他智能任务的基础,是其自主性能的核心;一般来说,主要依靠路径长度、运动时间、避障性能和路径光滑度等评价准则来判定一条路径是否最优,因此路径规划在减少机器人工作时间、降低能源损耗和减轻机器人磨损等方面具有决定性的作用。
2、通过对人工势场法基本原理和改进策略的分析研究,我们发现apf算法很难满足机器人局部规划的要求,需要寻求新的规划算法,而apf算法更适合作为一种优化方式对现有算法进行改进,动态窗口法是发展较为成熟的局部路径规划算法之一,由于其充分考虑机器人运动学限制,在移动机器人平台得到了广泛应用。
3、现如今,移动机器人行业高速发展,机器人自主导航面对的场景日趋复杂,简单的基础算法已无法满足局部路径规划实时性、灵活性的要求,近年来逐渐出现结合多种算法的融合算法实例,极大提升了算法性能,但仍存在以下问题:
4、(1)前瞻性不足、实时避障效果不佳,机器人运行过程中的安全性难以得到足够保障。
5、(2)运行效率有待提高,机器人在复杂环境中难以保持比较好的运行姿态。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种针对室内复杂环境的局部路径规划方法、电子设备及介质,该发明能够保障机器人运行过程中的安全性,运行效率高,机器人在复杂环境中也可以保持比较好的运行姿态。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明提供的第一个方面,本发明提供一种针对室内复杂环境的局部路径规划方法,包括如下步骤:
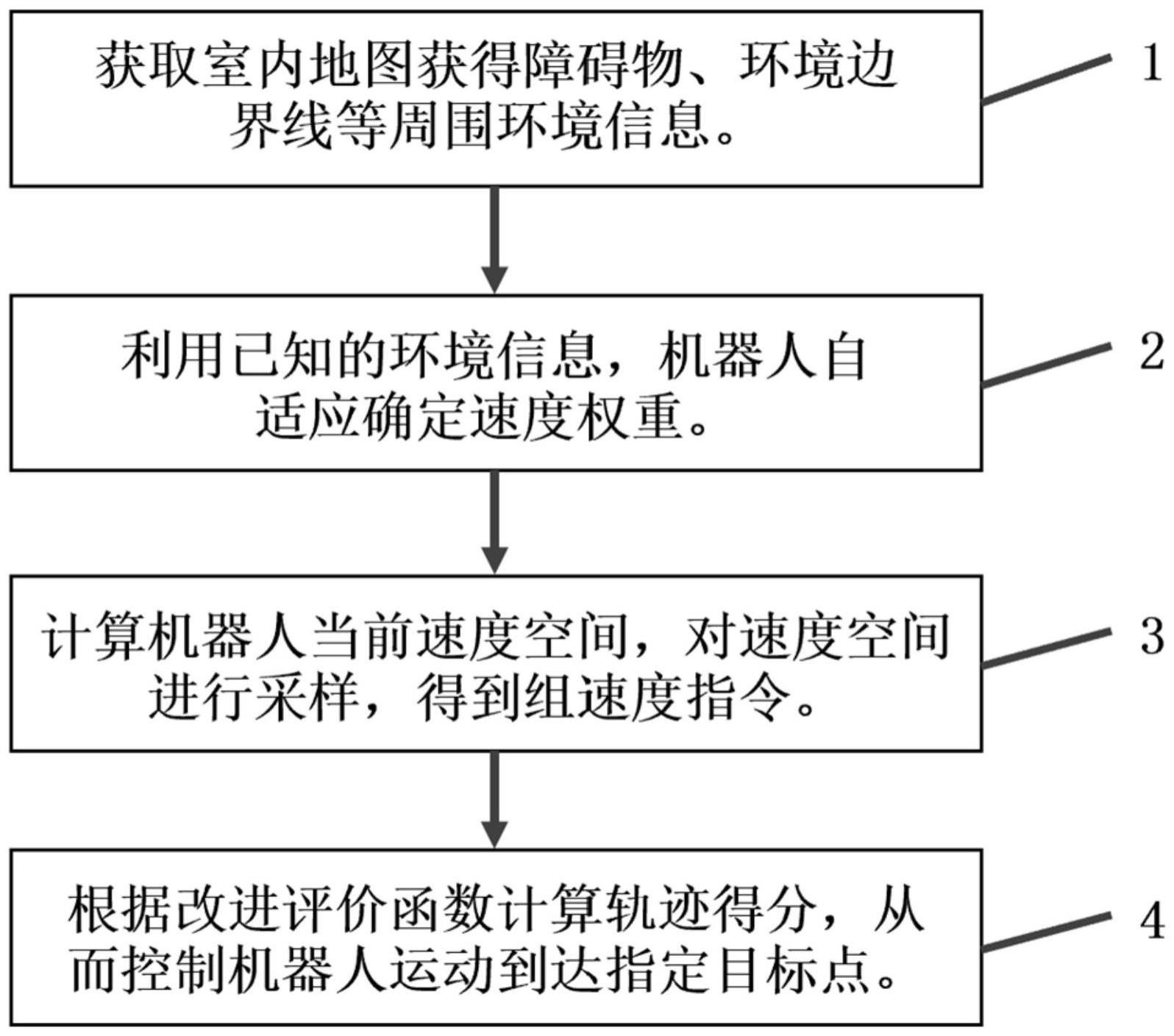
4、根据预先构建的包含障碍物信息和环境边界线的室内地图,获取障碍物的动态速度权重参数,自适应调整机器人的速度权重;
5、计算机器人的当前速度空间,对速度空间进行采样,得到组速度指令;
6、根据每一组速度指令,采用动态窗口法进行运动轨迹预测,得到n组预测轨迹,根据每组预测轨迹的速度指令和机器人的速度权重,构建评价函数,根据评价函数计算各组预测轨迹的得分,筛选得分最高的预测轨迹作为最终轨迹;评价函数由方向角评价函数,障碍物距离评价函数、速度评价函数和势场评价函数组成。
7、优选地,描述评价函数的公式为:
8、gmod(vi,ωi)=α·heading(vi,ωi)+β·dist(vi,ωi)+γadapt·velocity(vi,wi)+λ·potential(vi,ωi)
9、式中,gmod(vi,ωi)为评价函数,γadapt为自适应速度评价权重,λ为势场评价权重,potential(vi,ωi)为势场评价函数,(vi,ωi)表示该组轨迹的速度指令信息,heading(vi,ωi)表示方向角评价函数,α表示方向角评价权重,dist(vi,ωi)表示障碍物评价函数,β表示障碍物评价权重;velocity(vi,ωi)表示速度评价函数。
10、优选地,得到势场评价函数的过程具体为:对机器人预测轨迹的最后一个位姿进行评价,根据障碍物与目标点位置计算合力方向角,将合力方向角与预测方向角做差值得到偏差值;
11、势场评价函数表示为:
12、potential(vi,wi)=180°-|θforce-θfore|
13、式中,θforce表示合力方向角,θfore为机器人最终位姿的指向角度。
14、优选地,描述机器人的速度权重的计算公式为:
15、
16、式中,γmin和γmax分别表示速度权重的最小值与最大值,k表示比例值设置,α为指数值,设置为有理数;dmin表示当前状态下机器人形心与附近障碍物的最短距离,ds为阈值,ds的计算公式如下所示:
17、
18、其中,f为比例系数。
19、优选地,预测轨迹的数量的计算公式为:
20、
21、式中,ωmax为机器人转动时的最大角速度,δt为采样周期间隔,[δf-ωmaxδt,δf+ωmaxδt]为δt采样周期间隔后的动力学极限位置,[max(δf,δf-ωmaxδt),min(δf,δf+ωmaxδt)]为动态窗口可选的转动角度命令集范围,δδ为转角变化的分辨率。
22、优选地,速度空间表示为:
23、v=vs∩vd∩va
24、vs={(v,ω)|vmin≤v≤vmax,ωmin≤ω≤ωmax}
25、vd={(v,ω)|v0-vaδt≤v≤v0+vaδt,ω0-ωaδt≤ω≤ω0+ωaδt}
26、
27、式中,vs为由机器人最大速度限制所得的速度空间,vd为由加速度限制所得的速度空间,va为在最大减速条件下,机器人的速度空间,va、ωa表示机器人最大加速度,(v0,ω0)为当前点速度,(va,ωa)为最大加速度。
28、优选地,方向角评价函数表示为:
29、heading(vi,ωi)=180°-|θtarget-θfore|
30、式中,θtarget为机器人预测位置与目标点的连线和世界坐标系x轴方向所得夹角,θfore为机器人最终位姿的指向角度,(vi,ωi)表示该组轨迹的速度指令信息。
31、优选地,障碍物评价函数表示为:
32、
33、其中,d0为障碍物评分最大值,即若预测轨迹与障碍物之间的距离超过d0,则认为该轨迹是安全的;dmin表示预测轨迹与障碍物的最近距离,rrobot与rinf表示机器人半径和障碍物膨胀半径。
34、根据本发明提供的第二个方面,本发明提供一种电子设备,包括:
35、一个或多个处理器;存储器;和被存储在存储器中的一个或多个程序,所述一个或多个程序包括用于执行如上任一所述针对室内复杂环境的局部路径规划方法的指令。
36、根据本发明提供的第三个方面,本发明提供一种计算机可读存储介质,其特征在于,包括供电子设备的一个或多个处理器执行的一个或多个程序,所述一个或多个程序包括用于执行如上任一所述针对室内复杂环境的局部路径规划方法的指令。
37、与现有技术相比,本发明具有以如下有益效果:
38、(1)本发明通过人工势场对机器人前进方向进行引导,可以有效改善传统dwa算法前瞻性不足、实时避障效果不佳等问题;由于势场评价函数同样考虑了障碍物信息,且考虑范围大于避障评价函数,一定程度上提高了算法的避障能力,提高了机器人运行过程中的安全性。
39、(3)本发明提出了一种根据障碍物信息的动态速度权重参数调整方式,可以根据障碍密集程度自适应的改善速度评价权重,其基本方式为在距障碍物较近时,降低速度权重以保证安全性;而在较空旷区域,提高速度权重以提高运行效率。该方法旨在根据环境信息有针对性的调整机器人运行指令,在安全性和快速性间寻求平衡,使机器人在复杂环境中依然可以保持比较好的运行姿态。