一种未知外部干扰下四旋翼无人机扰动抑制容错控制方法
本发明属于无人系统控制,具体涉及一种未知外部干扰下四旋翼无人机扰动抑制容错控制方法。
背景技术:
1、自1917年设计出第一架无人机以来,无人机已广泛应用于载荷运输、精准农业、环境监测、城市监控等领域。近年来,由于四旋翼无人机具有超低空飞行、悬停和巡航的能力,有助于人类完成危险任务,从而保护人类安全,因此,越来越多的研究人员对这个方向感兴趣。
2、如何精确地控制四旋翼无人机是成功利用四旋翼无人机的主要障碍之一。然而,四旋翼无人机的控制面临着许多困难。例如,四旋翼无人机机动系统是欠驱动系;其数学模型具有非线性、参数不确定性和耦合性;四旋翼无人机在飞行过程中可能会遇到未知的风干扰和压力变化。这些都降低了控制性能,给四旋翼无人机的控制带来了挑战。因此,找到解决上述问题的有效方法,对实现四旋翼无人机的高精度控制具有重要意义。
3、除了非线性、耦合和扰动的影响外,执行器故障也会降低四旋翼无人机群的控制性能,对于小规模的四旋翼无人机群,使用额外的仪器来解决执行器故障是十分困难的。因此,最好在控制中解决这类问题。从这个角度出发,在控制系统中设计了容错机制。一个容错控制律通常包括被动和主动。四旋翼无人机系统中最常见的执行器故障之一是部分失去控制效。这类执行器故障被认为是控制输入中系统参数不确定性的匹配。针对执行器故障采用滑模控制等鲁棒控制方法。但是,滑模控制可能会引起抖振问题,且自适应规律复杂。
4、针对于以上现存技术问题,本发明提出了一种基于等价输入干扰的控制方法来抑制四旋翼无人机的执行器故障和外界扰动。
技术实现思路
1、本发明通过首次将eid方法应用于驱动器故障和外界干扰的处理,旨在解决现有技术未考虑四旋翼无人机的驱动器故障影响的技术问题。
2、为实现上述目的,本发明提供一种未知外部干扰下四旋翼无人机扰动抑制容错控制方法,包括以下步骤:
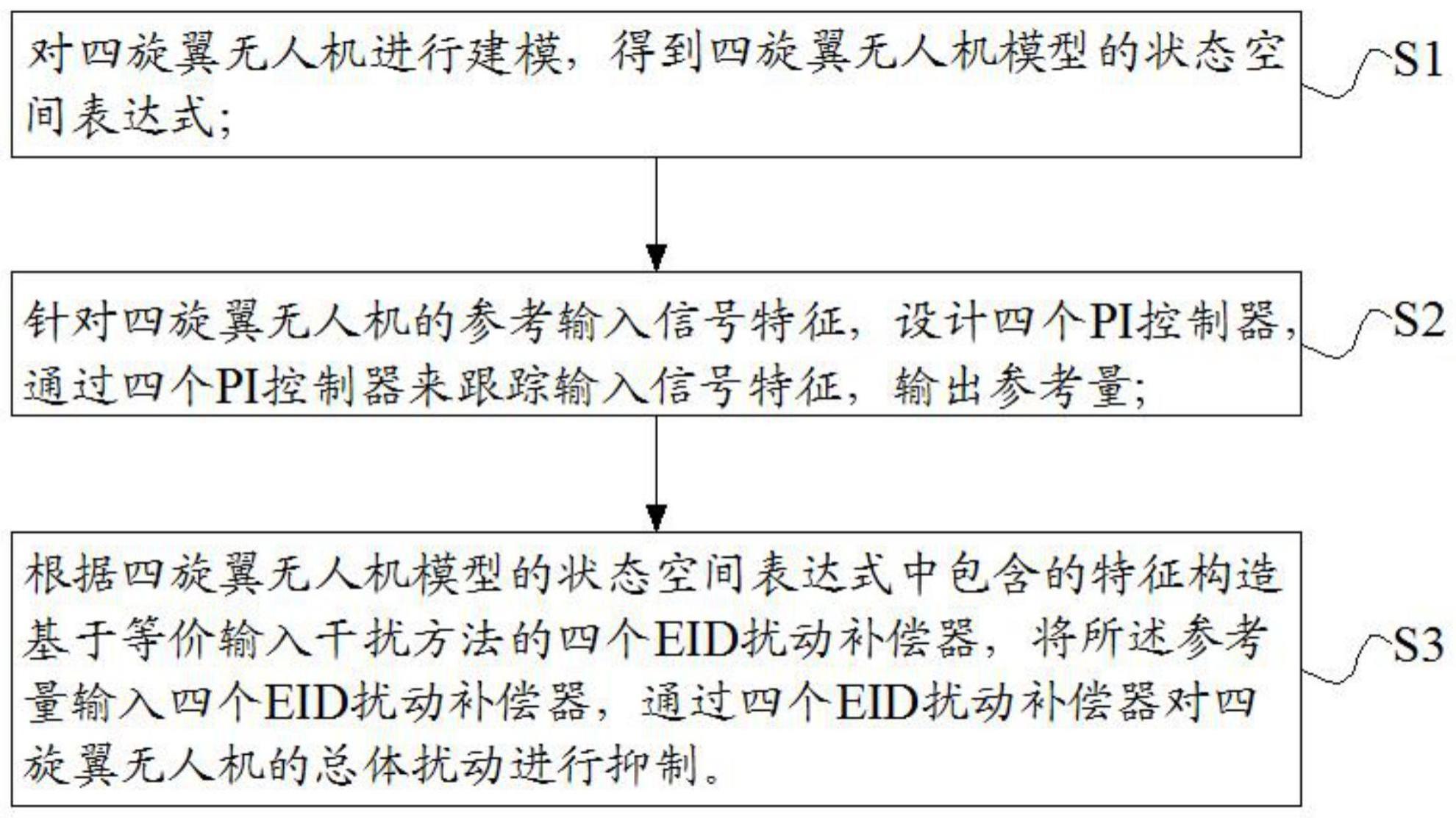
3、对四旋翼无人机进行建模,得到四旋翼无人机模型的状态空间表达式;
4、针对四旋翼无人机的参考输入信号特征,设计四个pi控制器,通过四个pi控制器来跟输入信号特征,输出参考量;
5、根据四旋翼无人机模型的状态空间表达式中包含的特征构造基于等价输入干扰方法的四个eid扰动补偿器,将所述参考量输入四个eid扰动补偿器,通过四个eid扰动补偿器对四旋翼无人机的总体扰动进行抑制。
6、优选地,所述状态空间表达式中包含的特征有四旋翼非线性特性、不确定性、未知外扰、执行器故障。
7、优选地,所述状态空间表达式为:
8、
9、式中,(x,y,z,θ,φ,ψ)表示四旋翼无人机的六个输出信号,(x,y,z)表示无人机的位置向量,(θ,φ,ψ)表示无人机的角度向量,其中θ表示俯仰角,φ表示航向角,ψ表示航向角,参数上面加点表示求导;g是重力加速度,jx,jy,jz是机身转矩,jr是转子转矩;d=[dx,dy,dz,dθ,dφ,dψ]t,||d||∞≤dm,式中的代表系统受到的未知的外界干扰,dm是正常数,(dx,dy,dz)的单位是m/s2,(dθ,dφ,dψ)的单位是rad/s2;ki为空气动力学阻尼系数,i=1-6;ui为惯性坐标系中的升力,i=1-4;
10、式中-1≤δi≤0,i=1,2,3,4表示执行器的控制能力水平;δi=0表示第i个执行器无故障能够正常工作;1<δi<0表示第i个执行器发生一定程度的故障;δi=-1,表示第i个执行器不工作;
11、且:
12、
13、其中,u1用于控制z,u2用于控制θ,u3用于控制φ,u4用于控制ψ,ωi表示旋翼转速,i=1-4;(u,τθ,τφ,τψ)表示四旋翼无人机的四个输入,u为惯性坐标系中的总升力,τθ,τφ,τψ是ε中的扭矩,ε表示惯性坐标系;m为四旋翼飞行器的质量;l是旋翼和质心之间的长度旋翼和质心之间的长度。
14、优选地,所述通过四个pi控制器来跟输入信号特征,输出参考量,具体包括:
15、将无人机的四个控制输出信号(z,θ,φ,ψ)引入四个pi控制器,通过所述pi控制器来跟踪四个参考信号(zd,ψdθd,φd),并得到四个参考量(uzr,uψr,θr,φr)。
16、优选地,所述将所述参考量输入四个eid扰动补偿器,通过四个eid扰动补偿器对四旋翼无人机的总体扰动进行抑制,具体包括:
17、将四个参考量分别输入到四个eid扰动补偿器,输出四个虚拟控制输入信号(μz,μθ,μφ,μψ),抑制外部扰动(dz,dθ,dφ,dψ);
18、所述四个虚拟控制输入信号通过严密线性化方法得到四个实际的控制输入信号(u1,u2,u3,u4);
19、将四个所述实际的控制输入信号(u1,u2,u3,u4)输入所述状态空间表达式,得到四个控制输出信号(z,θ,φ,ψ);
20、将四个控制输出信号(z,θ,φ,ψ)又反馈到系统输入端,跟四个参考输入信号(zd,ψdθd,φd)进行相减求差,将差值输入到四个pi控制器里面去进行跟踪控制。
21、优选地,所述四个虚拟控制输入信号(μz,μθ,μφ,μψ)分别是竖直方向、横滚角方向、俯仰角方向、航向角方向上的虚拟输入,所述四个实际的控制输入信号(u1,u2,u3,u4)如下所示:
22、
23、将δiui,i=1,2,3,4作为附加扰动,令总的扰动如下所示:
24、
25、式中,[dx,dy,dz,dθ,dφ,dψ]t表示(x,y,z,θ,φ,ψ)六个通道上的存在的外界未知扰动;
26、综上可得,得到四旋翼无人机模型进行线性化后的模型如下所示,根据所述pi控制器跟踪参考输入;
27、
28、优选地,所述pi控制器如下所示:
29、
30、其中,zr=-kmzz1-kizz3,ez代表z通道控制器的输出量;
31、结合pi控制器参数,而得出所述模型以z通道为例的eid扰动补偿器结构如下所示:
32、
33、其中,afz、bfz、cfz为低通滤波器f(s)的状态空间系数,b+=(btb)-1bt,为状态反馈参数,和是pi控制器的参数,是观测器增益,eid控制输入的通道中存在一个扰动dz,dz的影响与实际扰动的影响相同。
34、优选地,所述低通滤波器f(s)的形式如下所示:
35、
36、其中,ω'是角频率,wr是最高角频率,i是单位矩阵;
37、通过所述低通滤波器过滤系统噪声,其状态表示模型如下所示:
38、
39、其中,afz、bfz、cfz表示低通滤波器状态空间系数;zf表示z通道的噪音,代表z通道上的扰动滤波值,代表z通道上的扰动观测值。
40、本发明具有以下有益效果:
41、本发明提供一种未知外部干扰下四旋翼无人机扰动抑制容错控制方法,设计了四个eid估计器来抑制总的扰动,提高了控制性能,并设计了四个前置pi控制器来跟踪规定的周期参考信号。相比于其他抑制方法,本发明提出的未知外部干扰下四旋翼无人机容错控制方法首次将eid方法用于对执行器故障和外界未知干扰的处理,进一步提高了控制性能。
- 还没有人留言评论。精彩留言会获得点赞!