基于改进粒子群优化算法的光伏发电MPPT控制方法
本发明属于光伏发电,具体涉及一种最大功率点跟踪的控制方法。
背景技术:
1、近年来,电力需求的增加加快了化石燃料的消耗。由于化石燃料对环境的不良影响和资源的有限性,人们对太阳能这一清洁的可再生能源给予了高度关注。光伏发电系统在户外工作时,由于云层、灰尘、建筑物阴影的移动,光伏阵列处于局部阴影之下,此时光伏阵列的p-v特性曲线表现为多个峰值。复杂的p-v特性曲线使得传统的最大功率点跟踪(maximum power point tracking,mppt)方法如恒定电压法,电导增量法等会陷入局部峰值,导致mppt方法失效。
2、为了克服传统mppt方法的缺点,越来越多的智能算法被应用于解决mppt问题,包括粒子群算法、萤火虫算法、杜鹃搜索算法等。粒子群算法由于具有实现简单且快速收敛的特点,被广泛应用。传统粒子群mppt算法存在跟踪速度慢、功率振荡大、易陷入局部峰值点导致跟踪精度低等问题。目前的部分研究通过实时改变粒子群算法的参数来提高性能,但由于参数是单调变化的,可能存在初始迭代时扰动过大从而跳过潜在最大功率点的问题。另外,许多研究将两种类别的mppt算法进行融合以消除单个mppt算法的局限性,然而不当的融合会导致算法的过度复杂从而提高成本,进一步增加实现难度。因此,采用基于传统粒子群mppt算法实现的光伏发电mppt控制方法在跟踪光伏阵列最大功率点的过程中存在跟踪速度慢、跟踪精度低及功率振荡大等问题亟需解决。
技术实现思路
1、本发明目的是为了解决现有光伏发电mppt控制方法在跟踪光伏阵列最大功率点的过程中,存在的跟踪精度低、跟踪速度慢以及功率振荡大的问题,本发明提出基于改进粒子群优化算法的光伏发电mppt控制方法,在提高了跟踪效率和精度的同时,减小了功率振荡。
2、基于改进粒子群优化算法的光伏发电mppt控制方法,该方法包括
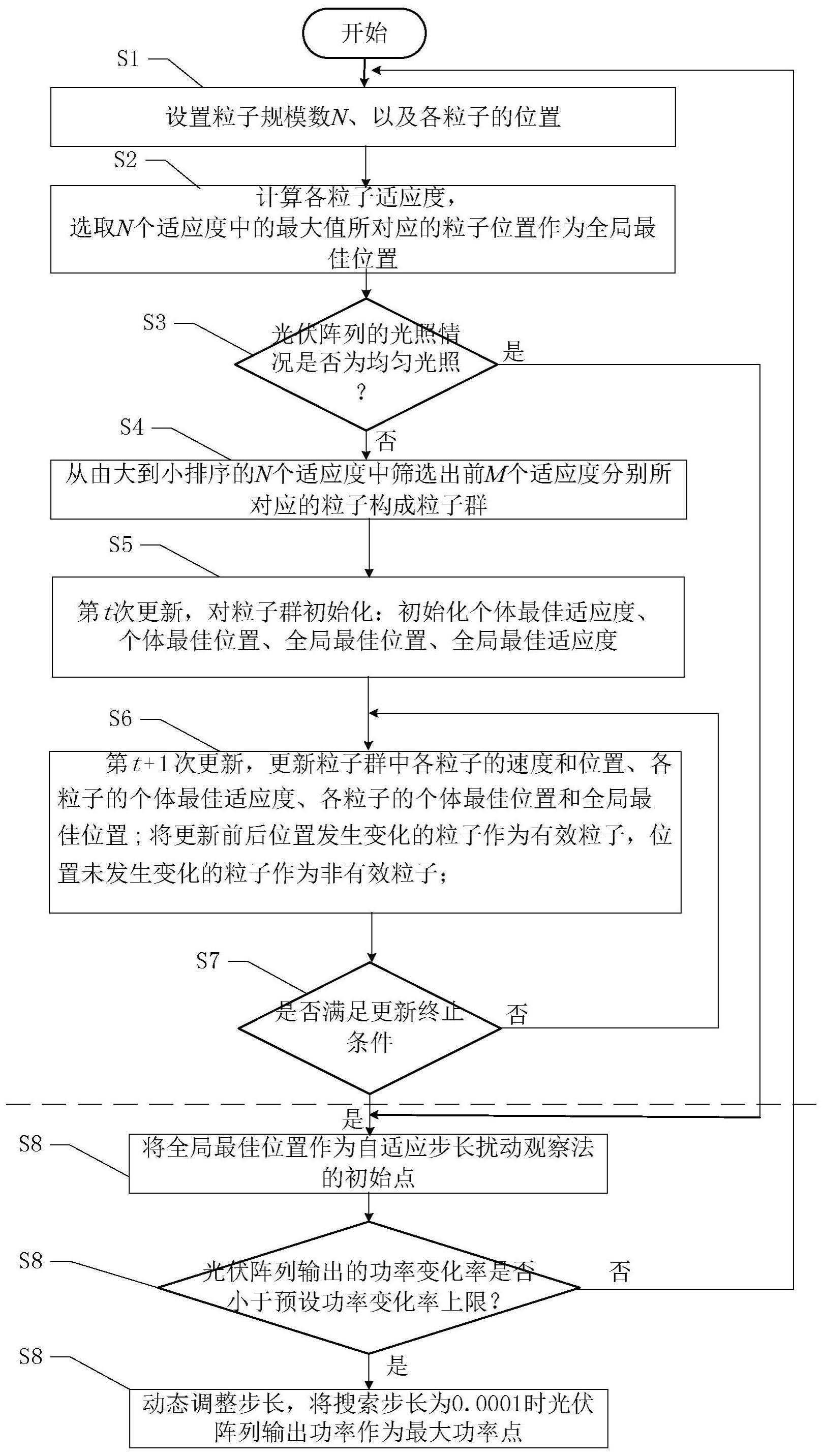
3、s1、将光伏发电系统中dc/dc变换器所接收的mppt控制器输出的开关信号的占空比作为粒子位置,设置粒子规模数为n,第一至第n个粒子位置依次变大;
4、s2、记录dc/dc变换器在接收各粒子位置时,光伏阵列输出的电压和电流,并计算光伏阵列输出的功率,将该光伏阵列输出的功率作为粒子的适应度;将n个适应度由大到小排序,选取n个适应度中的最大值所对应的粒子位置作为全局最佳位置;
5、s3、根据所有粒子位置所对应的电压和电流,判断光伏阵列的光照情况是否为均匀光照,结果为是,执行步骤s8,结果为否,执行步骤s4;
6、s4、构建粒子群:
7、从由大到小排序的n个适应度中筛选出前m个适应度分别所对应的m个粒子构成粒子群;
8、s5、第t次更新,对粒子群初始化:t的初始值1,将粒子群中各粒子的适应度和位置分别作为该粒子的个体最佳适应度和个体最佳位置,将粒子群中m个适应度中的最大值作为全局最佳适应度,并将适应度最大值所对应的粒子位置作为全局最佳位置,且将粒子群中m个粒子的速度初始值均设为0,m<n;
9、s6、第t+1次更新包括:
10、更新粒子群中各粒子的速度和位置、各粒子的个体最佳适应度、各粒子的个体最佳位置和全局最佳位置;
11、将更新前后位置发生变化的粒子作为有效粒子,位置未发生变化的粒子作为非有效粒子;
12、s7、根据有效粒子中位置最大值和最小值,判断是否满足更新终止条件,结果为是,则执行步骤s8,结果为否,t=t+1,执行步骤s6;
13、s8、将全局最佳位置作为自适应步长扰动观察法的初始点,将其通过mppt控制器发送至dc/dc变换器,当采样得到的光伏阵列输出的功率变化率小于预设功率变化率上限时,通过动态调整扰动观察法的搜索步长实现对最大功率点的动态跟踪,动态跟踪过程中将搜索步长由0.005按动态调整方式下调至0.0001,并将搜索步长为0.0001时光伏阵列输出功率作为最大功率点;当采样得到的光伏阵列输出的功率变化率大于或等于功率变化率上限时,则返回步骤s1。
14、作为优选,步骤s6中,更新粒子群中各粒子的速度和位置的实现方式为:
15、
16、其中,
17、表示第t+1次更新后第i个粒子的位置,i=1,2,……m,表示第t次更新后第i个粒子的位置,表示第t+1次更新后第i个粒子的速度,表示第t次更新后第i个粒子的速度,表示第t次更新后第i个粒子的权重因子,c1,i表示第t次更新后第i个粒子的认知学习因子,c2,i表示第t次更新后第i个粒子的社会学习因子,c2,i的取值为1.1,表示第t次更新后第i个粒子的个体最佳位置,为第t次更新后的全局最佳位置。
18、作为优选,c1,i<c2,i。
19、作为优选,步骤s6中,更新粒子群中各粒子的个体最佳适应度的实现方式包括:
20、使t+1次更新后的各有效粒子的位置发送至dc/dc变换器,采集光伏阵列输出的电压和电流,并计算每个有效粒子的适应度,将t+1次更新后的每个有效粒子的适应度与第t次更新后相应粒子的最佳适应度比较,若差值大于0,将该有效粒子的适应度作为t+1次更新后的相应有效粒子的个体最佳适应度;
21、同时,使第t+1次更新后的各非效粒子的适应度和个体最佳适应度与第t次更新后的相应粒子的适应度和个体最佳适应度保持不变。
22、作为优选,步骤s6中,更新粒子群中各粒子的个体最佳位置的实现方式包括:
23、
24、其中,为第t+1次更新后第i个粒子的位置,i=1,2,……m,为第t+1次更新后第i个粒子的个体最佳位置,为第t次更新后第i个粒子的个体最佳位置,为所对应的适应度,为所对应的适应度。
25、作为优选,步骤s6中,更新全局最佳位置的实现方式包括:
26、
27、其中,为第t+1次更新后的全局最佳位置,为第t次更新后的全局最佳位置,为第t次更新后第i个粒子的个体最佳位置,i=1,2,……m,为所对应的适应度,为所对应的适应度。
28、作为优选,步骤s3中,根据所有粒子位置所对应的电压和电流,判断光伏阵列的光照情况是否为均匀光照的实现方式包括:
29、将第一和第n个粒子位置所对应电压和电流作为参考点,各粒子位置所对应的电压和电流,均满足两条件中的任意一个条件时,判定光伏阵列处于均匀光照下,否则,判定光伏阵列处于局部阴影中;其中,
30、条件1、第j个粒子位置所对应的电压v(j)满足:
31、条件2、第j个粒子位置所对应的电流i(j)满足:
32、a为电压差值百分比的上限,b为电流差值百分比的上限,j=2,……n-1。
33、作为优选,a=0.2,b=0.1。
34、作为优选,步骤s7中,更新终止条件的条件为:
35、其中,dmax为有效粒子中位置最大值,dmin为有效粒子中位置最小值。
36、作为优选,步骤s8中,动态调整扰动观察法的搜索步长的实现方式为:
37、
38、λk为第k次采样至第k+1次采样这一时间段所对应的搜索步长,λk-1为第k-1次采样至第k次采样这一时间段所对应的搜索步长,δλ为搜索步长调整幅度,δpk为第k次采样光伏阵列输出的功率变化率。
39、本发明的有益效果是:
40、1.能够对光照类型(光照情况)进行识别,在不同的光照条件下采取不同的控制策略,有效提高了最大功率点跟踪的效率。
41、2.采用选拔机制得到高质量的初始粒子,有效减少了粒子的迭代次数。改进了传统粒子群算法的迭代公式并融入粒子剔除机制,不发送无法带来光伏阵列功率新信息的粒子,加快了算法的收敛速度并且减少了功率振荡。
42、3.在最大功率点跟踪的过程中,将改进的粒子群算法和自适应步长扰动观察法有机结合,在保证算法全局搜索能力的同时也做到了对功率的精确跟踪。
- 还没有人留言评论。精彩留言会获得点赞!