基于神经网络跟踪微分器的磁浮列车悬浮反馈控制方法
本发明涉及磁浮列车悬浮控制领域,具体涉及一种基于神经网络跟踪微分器的磁浮列车悬浮反馈控制方法。
背景技术:
1、磁浮列车作为一种新型轨道交通工具,改变了传统轮轨铁路的轮轨接触支承和驱动的方式,而是通过电能产生磁力,使车辆悬浮并驱动列车前进。它与传统轮轨列车系统相比,具有噪声低、摩擦损耗小、维护成本低、爬坡能力强等优势,是一种具有非常良好发展前景的交通工具。悬浮控制技术是磁浮列车的关键和核心技术之一,悬浮控制系统性能的好坏直接影响磁浮列车的稳定性、安全性和舒适性。在磁悬浮列车系统中,列车电磁铁与轨道通过电磁力相互作用,悬浮间隙的变化由间隙传感器测量输入到控制系统,再由控制系统调整电磁铁线圈电流,使电磁力发生相应变化,实现悬浮间隙的调整。
2、悬浮系统工作环境恶劣,系统间隙通道常含有随机噪声,当干扰噪声强度过大,势必影响列车的悬浮性能,跟踪微分器作为磁浮列车稳定悬浮的关键技术,能够对含噪声间隙信号进行合理的跟踪滤波以及微分提取。目前跟踪微分器的参数调整方式主要为人工手动调参,而磁浮列车间隙通道中的随机噪声在实际情况中是不断变化的,单一固定的跟踪微分器参数设置将会使微分器的抗噪声能力受到一定程度的限制,无法达到实时的最佳效果。bp神经网络是由大量简单的基本神经元相互连接而成的自适应非线性动态系统,它能完全任意逼近任何复杂非线性系统,并能学习和自适应不确定系统的动态特性,常被用于与各种控制器相结合从而完成自适应参数调整以达到提升控制品质及动态性能的目的。本发明针对跟踪微分器参数难以实时调整问题,设计了基于bp神经网络在线调参的跟踪微分器,并将其作为悬浮反馈控制算法的关键技术之一,以提升磁浮列车的悬浮控制品质。
技术实现思路
1、本发明的目的在于针对跟踪微分器参数难以实时调整问题,提供一种基于神经网络跟踪微分器的磁浮列车悬浮反馈控制方法,能够实时调节参数的跟踪微分器及其磁浮列车悬浮反馈控制,其中设计一种具备线性特性的新型跟踪微分器算法,在此基础上,加入bp神经网络对控制参数进行自适应调节,进而设计悬浮反馈控制架构控制磁浮列车稳定运行,提高控制品质。
2、为解决磁浮列车悬浮系统间隙通道处存在随机噪声,影响列车稳定悬浮的难题,于间隙传感器加入跟踪微分器对含噪声间隙信号进行跟踪滤波;针对跟踪微分器参数难以实时调整问题,利用bp神经网络学习和自适应不确定系统的动态特性,设计了一种神经网络跟踪微分器,实现控制参数的自适应调节,以提高跟踪滤波性能。
3、为实现上述目的,本发明的技术方案是:一种基于神经网络跟踪微分器的磁浮列车悬浮反馈控制方法,见图1,包括如下步骤:
4、步骤1、以状态反步法构造一种具备线性特征的简易最速综合控制函数进而设计一种新型跟踪微分器算法;
5、步骤2、结合bp神经网络能够学习和自适应不确定系统的动态特性,设计一种基于bp神经网路参数自适应调节的跟踪微分器算法;
6、步骤3、在pid控制器的基础上,引入步骤2参数自适应调节后的跟踪微分器对悬浮通道输出悬浮间隙信号进行跟踪滤波,搭建基于跟踪微分器的悬浮反馈控制器框架;
7、步骤4、将经过跟踪微分器滤波后的间隙信号输入到pid控制器,得到控制电压信号;将控制电压信号输入到磁浮列车悬浮控制系统,控制磁浮列车悬浮并运行,得到稳定的悬浮间隙信号;
8、步骤5、重复步骤4。
9、在本发明一实施例中,所述步骤1具体内容为:
10、将本发明定义为磁浮列车悬浮控制系统、神经网络以及线性跟踪微分器算法构造。设计有效的跟踪微分器算法对间隙传感器输出信号进行合理滤波处理是构造磁浮列车悬浮反馈控制器结构的关键,而控制综合函数是跟踪微分器算法的核心。对于双积分连续串联最速系统:
11、
12、采用欧拉折线法将上式离散化后可表示为离散系统:
13、x(k+1)=ax(k)+bu(k),u(k)≤r
14、式(2)中h为采样时间,x(k)为系统实时状态,u(k)为系统的控制输入,r为系统控制输入的约束条件。离散系统到达原点的快速最优控制综合函数的开关曲线及两条边界曲线为:
15、
16、
17、
18、式中γ、γa、γb分别为最速系统的开关曲线以及相平面的边界层曲线方程,见图2。根据以上公式构造统一的边界层曲线表达式:
19、
20、其中λ为变换因子,根据上式可得:
21、
22、当λ=0时,即为曲线γa,当λ=1时,即为曲线γb,可根据初始点的区域灵活选取边界曲线,进而寻求最优控制量。根据相平面控制量策略选择,构造本发明所提变边界层控制综合函数:
23、u=fst(x1,x2,r,c0h)
24、
25、其中sat(a,b)函数为饱和函数,当|a|≤|b|时,函数返回a/b,当a>b时,函数返回sign(a);sign(x)函数为符号函数,当x=0时,函数返回0,当x>0时,函数返回1,当x<0时,函数返回-1;均为中间变量。式中没有用到非线性运算,在实际数字控制系统中能够缩短运行时间,最终该新型跟踪微分器的离散表达式为:
26、
27、其中k为系统采样时刻,r为速度因子,代表跟踪速度;c0为滤波因子,代表滤波程度。
28、在本发明一实施例中,所述步骤2具体内容为:
29、bp神经网络是一种根据误差反向传播算法训练的多层前馈神经网络,其拓扑结构包括输入层、隐藏层和输出层。输入信息经过隐藏层处理后,从输入层传递到输出层。下一层神经元的状态只受每一层神经元节点状态的影响。当输出层不能达到预期输出时,改用反向传播,将误差信号沿原路径返回。通过不断调整各层神经元的权重,使误差函数值沿梯度方向下降,最终使实际输出值与期望输出值之间的误差最小。
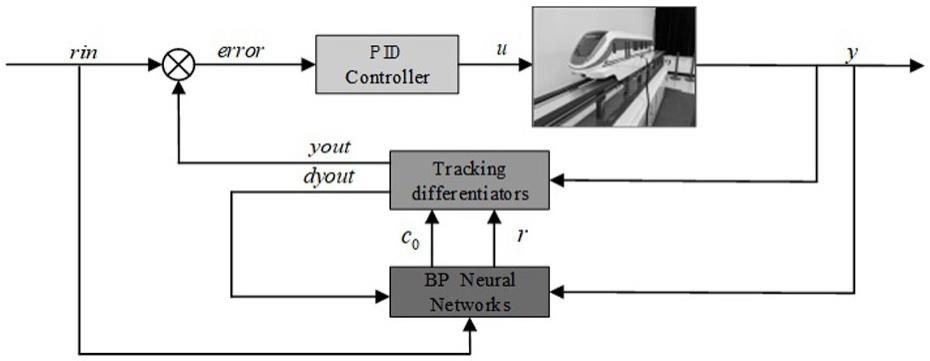
30、本发明采用三层bp神经网络,输入层选择跟踪微分器算法中最重要的三个变量:指定输入rin,实际输出yout,以及输出的微分dyout。另外,为了网络的稳定性,加入常数项1作为输入。经过多次尝试,确定隐藏层节点数为5个,输出层的两个输出对应于td的两个可调参数c0和r,其中bp神经网络跟踪微分器结构见图3,bp神经网络拓扑结构见图4。
31、bp神经网络输入层为:
32、
33、其中上标1、2、3分别表示输入层、隐藏层和输出层;
34、bp神经网络隐藏层的输入和输出为:
35、
36、其中为输入层到到隐含层的权重矩阵;
37、隐藏层神经元的变换函数取正负对称的tanh函数:
38、
39、bp神经网络输出层的输入和输出为:
40、
41、由于c0和r是应该是非负的,输出层神经元的转换函数取sigmoid函数:
42、
43、使用输出误差二次型作为性能指标,其性能指标函数为:
44、
45、根据梯度下降法调整bp神经网络的权系数,为了抑制网络训练中可能出现的振荡及惯性效应,还需要加入动量因子,于是bp神经网络输出层的权重系数修正公式写成:
46、
47、其中α是动量因子,η是学习速率;
48、因此bp神经网络输出层的权重更新公式为:
49、
50、其中
51、同样地,bp神经网络隐藏层权重更新公式为:
52、
53、其中
54、bp神经网络根据跟踪微分器算法提供的三个变量(即跟踪微分器的输入、输出及微分)通过上述参数整定算法,不断调整隐藏层与输出层的权重系数,直至获得最优输出值,即跟踪微分器算法的两个参数c0和r,进而将其传递到跟踪微分器算法中进行控制,实现跟踪微分器参数的在线调整。
55、在本发明一实施例中,所述步骤3具体内容为:
56、本发明采取当前相对成熟且工程界广泛应用的pid算法用作悬浮系统控制器,其设计简单,鲁棒性强。pid中的微分环节若使用数值差分法只能近似得到间隙信号的微分信号且极易造成噪声放大问题。经过真车实际运行工况得知输出间隙通道噪声强度在65db到75db之间,受到噪声影响会使相关的悬浮点上下抖动甚至吸附在轨道上,而在间隙输出端加入跟踪微分器能够对带噪声信号进行有效的跟踪滤波,进而反馈回悬浮系统控制器,控制磁浮车稳定悬浮。
57、在本发明一实施例中,所述步骤4具体内容为:
58、在间隙传感器处加入的跟踪微分器采取间隙输出通道的含噪声间隙信号,对其进行跟踪滤波,得到去噪之后的信号与输入额定信号相减,将误差信号传入pid控制器进行控制,pid控制器输出控制电压信号对悬浮系统进行控制,控制效果将表现为悬浮间隙信号的输出。
59、在本发明一实施例中,所述步骤5具体内容为:
60、重复上述步骤4,对磁浮列车悬浮控制系统的输出间隙信号进行滤波,并实时输出控制曲线及参数学习曲线,而后将滤波后的间隙信号反馈到pid控制器进行实时控制和调节。
61、相较于现有技术,本发明具有以下有益效果:本发明方法解决磁浮列车悬浮系统间隙通道处存在随机噪声,影响列车稳定悬浮的难题,于间隙传感器加入跟踪微分器对含噪声间隙信号进行跟踪滤波;针对跟踪微分器参数难以实时调整问题,利用bp神经网络学习和自适应不确定系统的动态特性,设计了一种神经网络跟踪微分器,实现控制参数的自适应调节,以提高跟踪滤波性能。本发明能够控制磁浮列车稳定运行,提高控制品质。
- 还没有人留言评论。精彩留言会获得点赞!