一种基于BP神经网络的磁浮列车悬浮系统自抗扰控制方法
本发明涉及磁浮列车悬浮控制,具体涉及一种基于bp神经网络的磁浮列车悬浮系统自抗扰控制方法。
背景技术:
1、磁浮列车是采用电磁悬浮技术实现车辆与导轨之间的无接触悬浮运行的新型的轨道交通工具,具有速度快、噪音小、维护成本低等优势。磁浮列车的核心子系统是悬浮系统,该系统对车体悬浮间隙进行实时控制,以保持车体与轨道之间的稳定悬浮状态。其关键是通过悬浮控制器对列车的悬浮力进行调节,使其与重力平衡(该状态称为平衡点)。
2、其中,悬浮系统是具备强耦合的非最小相位系统,系统本身具备强非线性。其次在实际运行中,磁浮列车易受到多源扰动的影响。扰动可能来自天气环境、轨道不平整、车辆载荷变化等因素,这些扰动会对悬浮系统造成不利的影响,导致悬浮间隙的变化和不稳定性。基于平衡点设计的控制器仅在该点附近具有较好的控制效果,在系统远离平衡点的工作状态,其控制性能会下降。其固定参数的特性导致该控制器无法在扰动多变的环境中展现良好的控制品质。
3、因此,如何设计一种用于磁浮列车悬浮系统具有强抗扰和对扰动实时精准估计的控制方法成为亟需解决的问题。
技术实现思路
1、本发明的目的在于旨在克服现有技术在磁浮列车悬浮控制方面存在的缺陷,提供一种基于bp神经网络的磁浮列车悬浮系统自抗扰控制方法,相较于传统自抗扰控制方法,该方法将bp神经网络嵌入到扩张状态观测器中,从而提高对扰动的估计精度,进一步增强控制器的抗扰能力。
2、为实现上述目的,本发明的技术方案是:一种基于bp神经网络的磁浮列车悬浮系统自抗扰控制方法,该方法以自抗扰控制器为框架,采用bp神经网络实时在线调整扩张状态观测器的参数,实现对磁浮列车悬浮系统的稳定控制;该方法包括如下步骤:
3、步骤1、利用线性化处理技术将磁浮列车悬浮系统在平衡点处近似为二阶系统,采用扩张状态观测器估计系统输出的间隙信号和速度信号并实现对扰动的补偿;
4、步骤2、通过跟踪微分器得到目标信号的跟踪信号和微分信号,与步骤1获得的信号形成对应的误差信号;
5、步骤3、将步骤2中获得的误差信号输入到pd控制器中,扩张状态观测器对控制器的输出进行反馈补偿,得到系统的输入信号;
6、步骤4、将系统输入信号作用于磁浮列车悬浮系统,车体悬浮于轨道并得到系统输出信号;
7、步骤5、将步骤2的误差信号和步骤4系统输出信号传递给bp神经网络,通过bp神经网络的学习能力优化扩张状态观测器参数,提高对总扰动的估计精度;
8、步骤6、重复步骤1~5。
9、在本发明一实施例中,所述步骤1具体内容为:
10、本发明研究内容为磁浮列车的悬浮系统,列车每节车厢都包含多个悬浮点,每个悬浮点位于车体的边缘下方,且都装有间隙传感器、加速度传感器和悬浮电磁铁。每个悬浮点具有相同的结构,彼此之间不存在耦合,因此本发明将单点悬浮系统作为被控对象进行研究分析。结合电力学和动力学原理,单点悬浮系统模型可以表示为:
11、
12、其中,s为悬浮电磁铁与轨道之间的间隙;g为重力加速度;m表示列车车体在单点处的质量;i为电磁铁线圈中的电流;f为作用在系统上的总扰动;r为电磁铁线圈的等效电阻;参数k可以表示为:
13、
14、其中,μ0为真空磁导率;n为线圈的匝数;am为电磁线圈的有效极面积。
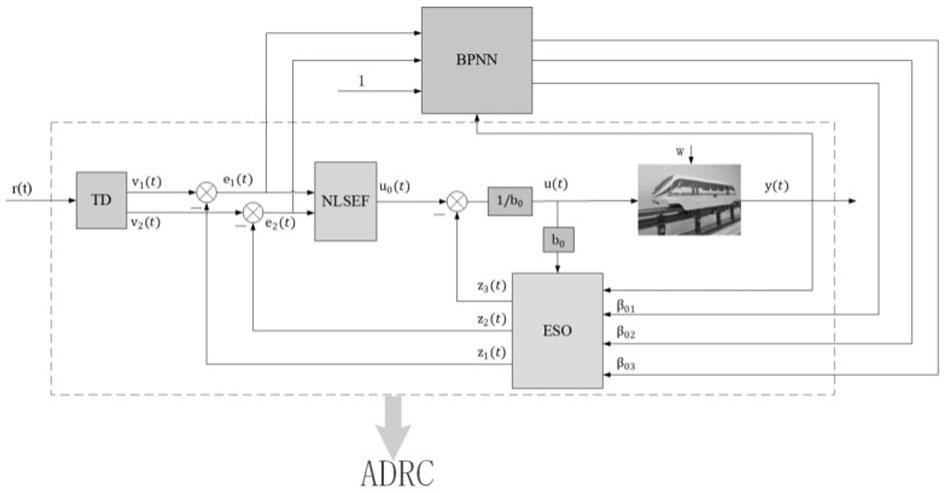
15、本发明将自抗扰控制器(adrc)作为悬浮控制器,该控制器具有不依赖于数学模型、抗扰性强、超调小等优势。adrc主要由跟踪微分器(td)、扩张状态观测器(eso)、pd控制器组成。此外,本发明还引入bp神经网络作为adrc的一部分。bp神经网络在adrc中的作用是参数优化,神经网络通过学习实时的系统响应和误差信息,自适应地调整eso的参数,以使其能够更好地适应系统的动态特性和工况的变化。
16、对于单点悬浮系统,由于电流环具有较高的频率特性,可以将其分为电流环和间隙环两个部分,其中电流环通过回路校正可以视作一个比例环节。通过线性化处理,对间隙环的非线性动力学方程进行泰勒展开,得到一个二阶系统:
17、
18、其中y1,y2分别为系统的间隙信号和速度信号;上式中的s0可以表示为:
19、
20、其中i0,u0分别为平衡点处的电流和电压;u为系统的输入信号;rk为电压与电流的比例系数。
21、对于该二阶系统,可构建扩张状态观测器:
22、
23、其中,h为步长;y为系统的输出信号;z1为y的估计值;z2为的估计值;z3为总扰动作用量的估计值;u为系统的输入信号;β01,β02,β03为扩张状态观测的设计参数;b为外部输入变量;fal函数表达式为:
24、
25、其中,x为期望值与估计值的误差;a和δ为自定义参数;sign(x)为符号函数,当x=0时,函数返回0;当x>0时,函数返回1;当x<0时,函数返回-1。
26、在本发明一实施例中,所述步骤2具体内容为:
27、跟踪微分器的形式可以表示为:
28、
29、其中,v为输入信号;x1为v的跟踪信号,x2为x1的微分,r为速度因子,h为积分时间,c0为滤波因子,fhan为最速综合函数,具体表达式如下:
30、
31、因此,可得到如下误差信号:
32、
33、在本发明一实施例中,所述步骤3具体内容为:
34、对于单点悬浮系统,采用pd控制器即可实现控制:
35、u0=kpe1+kde2(10)
36、其中,kp和kd为比例增益和微分增益。引入控制器带宽wc,通过极点配置得出kd=2wc。通过对控制器的输出信号u0进行反馈补偿得到系统的输入信号:
37、
38、其中b为磁浮列车悬浮系统的控制增益;
39、在本发明一实施例中,所述步骤4具体内容为:
40、将步骤3中的信号u输入到单点悬浮系统中,车体悬浮于轨道并得到系统输出信号。
41、在本发明一实施例中,所述步骤5具体内容为:
42、构建bp网络实现扩张状态观测器的参数调整,该bp神经网络包含4个输入层节点、5个隐藏层节点和3个输出层节点。
43、输入层由步骤2中的误差信号e1和e2,步骤4中的系统输出信号yout以及一个偏置项组成:
44、ii=[e1,e2,yout,1](12)
45、隐藏层的输入sk和输出zk表示为:
46、
47、zk=f(sk)(14)
48、其中,i为第i个输入层节点;k为第k个隐藏层节点;vki为输入层和隐藏层之间的权值;隐藏层的激活函数f(·)为:
49、输出层的输入sj和输出yj表示为:
50、
51、yj=g(sj)(16)
52、其中,j为第j个输出层节点;q为隐藏层节点数量;ωjk为隐藏层和输出层之间的权值;输出层的激活函数为:
53、扩张状态观测器的三个参数β01,β02,β03可以表示为:
54、
55、其中,gain1,2,3为增益项。
56、构造损失函数e:
57、
58、其中,m为输出层节点数量;tj为目标值;
59、采用梯度下降法对bp神经网络进行反向传播,用于更新网络的权重和偏置,以逐步减小网络的误差,表示为:
60、
61、其中,η为学习率;f'(sj)为隐藏层激活函数的导数;g'(sj)为输出层激活函数的导数;权值更新公式为:
62、
63、其中,n为时刻;δω(n)可以表示为任一权值;α为动量因子。
64、在本发明一实施例中,所述步骤6具体内容为:
65、重复上述步骤1至步骤5,利用bp神经网络优化扩张状态观测器,实时调整参数提高估计精度,从而提高自抗扰控制器性能。
66、相较于现有技术,本发明具有以下有益效果:本发明一种基于bp神经网络的磁浮列车悬浮系统自抗扰控制方法,相较于传统自抗扰控制方法,该方法将bp神经网络嵌入到扩张状态观测器中,从而提高对扰动的估计精度,进一步增强控制器的抗扰能力。本发明实现了具有强抗扰和对扰动实时精准估计的磁浮列车悬浮系统控制。
- 还没有人留言评论。精彩留言会获得点赞!