多飞行器协同智能决策与轨迹在线规划方法、系统及介质
本发明涉及飞行器任务规划和作战运用领域,具体涉及一种多飞行器协同智能决策与轨迹在线规划方法、系统及介质。
背景技术:
1、现有技术中,飞行器集群作战系统的任务规划与决策是一个具有复杂约束的多目标优化问题,是一类np难题,主要研究在满足各项战术技术指标的前提下,如何为各飞行器指定所需执行的任务及具体的执行时间,在满足各类约束的同时,使得多飞行器协同系统实现尽可能高的作战效能。传统的任务规划与决策技术通常是为各飞行器指派具体的目标,而随着飞行器任务复杂性的不断增强和协同性的不断提高,任务规划与决策技术不仅包括对飞行器任务目标的指派,还要根据具体的任务协同性需求,确定各飞行器执行任务的关系。
2、在任务规划与决策模型优化求解算法方面,当前国内外对于单个飞行器规划比较多,而针对多个飞行器协同作战任务规划研究则比较少,且多采用启发式算法或者使用一些通用模型来解决,算法稳定性差。当前的多飞行器任务规划多使用的是集中式静态规划,考虑对突发紧急任务处理的还较少,规划结果确定后,对新加入的任务,需全部打乱结果进行重规划,造成非必要的资源浪费。
3、随着当前信息化作战技术的发展以及越来越多战场任务需求,当前国内外军事强国越来越开始集中关注于多飞行器协同任务规划与决策的研究,并且开始将新的其他领域的知识应用于弹群协同任务规划中。如何解决飞行器集群作战系统中协同轨迹规划与决策问题,以推动飞行器武器作战方式的精准及有效,是目前急需解决的技术问题。
技术实现思路
1、为解决多飞行器任务规划中集中式静态规划存在的问题,本发明提供一种多飞行器协同智能决策与轨迹在线规划方法、系统及介质,以牵引先进平台、武器、传感器、通信等技术的全面发展,还将对其他飞行器武器集群协同问题起到支撑作用,有效推动飞行器武器作战方式的发展。
2、本发明第一方面公开了一种多飞行器协同智能决策与轨迹在线规划方法,基于多目标动态分配实现,所述方法包括:
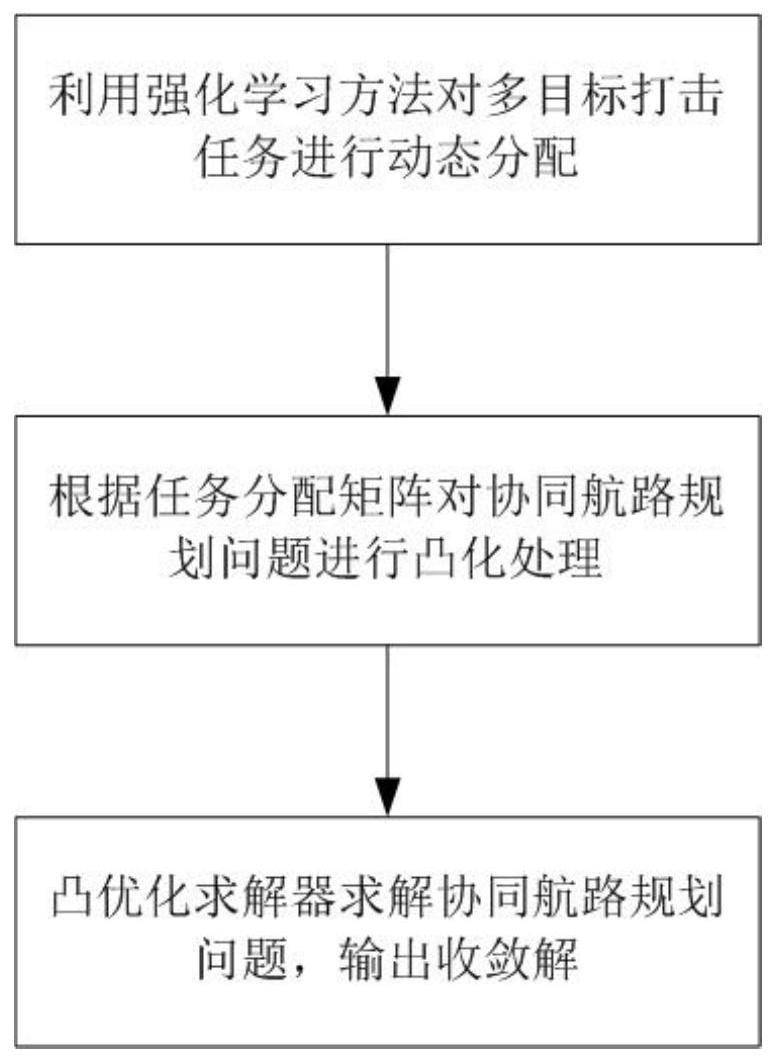
3、s1:综合战场环境、目标态势以及飞行器自身多种信息,构建多维度目标优势度模型和分层规划策略,结合强化学习方法动态获得最优打击目标,输出最优目标分配矩阵;
4、s2:根据步骤s1获得的最优目标分配矩阵对多飞行器协同编队轨迹规划问题进行建模,对所述建模中的非线性约束进行凸化处理,通过网格离散化将所述多飞行器协同轨迹规划问题转化为凸规划问题;
5、s3:利用凸优化求解器计算步骤s2中凸规划问题的多飞行器协同编队轨迹规划问题,通过迭代更新输出收敛解,即为所述多飞行器协同编队的轨迹。
6、根据本发明第一方面的方法,所述步骤s1具体包括:
7、s1.1利用层次分析法对多目标进行重要度评估,构建火力运用策略;
8、
9、使得其中:n为目标数量,m飞行器数量,wj为目标重要性的量化值,floor(·)和ceil(·)分别为向下取整函数和向上取整函数,hj表示分配打击目标j的飞行器数量,所有打击目标的分配结果构成了火力运用策略;
10、s1.2根据相对运动信息进行攻击优势度评估,计算综合攻击优势度,进一步构建攻防综合效费比指标;
11、
12、其中,为攻击性能指标,sij为飞行器i打击目标j的攻击优势度,xij为攻击分配矩阵x中的元素,飞行器i攻击目标j时xij标记为1,否则xij标记为0;为目标的毁伤性能指标,stj为第j个目标的价值,pij为飞行器i对目标j的突防概率;为飞行器成本指标,ci为飞行器i的成本;表示攻击效费比指标,表示毁伤效费比指标,最后j2表示获得攻防综合效费比指标,即攻击效费比与毁伤效费比之和。
13、s1.3综合考虑目标的重要程度和目标的打击性能,利用强化学习方法实现多目标的智能分配,输出满足约束条件下攻防综合效费比指标最优的目标分配矩阵;所涉及的约束条件为:每发飞行器最多只能攻击一个目标,每个目标至少分配的飞行器数量为步骤s1.1中所确定的火力运用策略。
14、根据本发明第一方面的方法,所述步骤s2中根据最优目标分配矩阵对多飞行器协同编队轨迹规划问题进行建模,对非线性约束进行凸化处理,进一步网格离散化后将协同编队轨迹规划问题转化为凸规划问题;所涉及的多飞行器协同轨迹规划问题建模为:
15、p1:find ui
16、min j0=c1(|λi(tf)-λi*|+|φi(tf)-φi*|)
17、
18、其中,ui为倾侧角变化率,λi*和φi*分别为飞行器i分配打击目标的经度和纬度,λi(tf)和φi(tf)为飞行器i终端时刻的经度和纬度;νi为飞行器i的倾侧角;qi和ni分别为飞行器i的热流率、动压和总过载;cr,cλ和cφ为常数;ri(t)、λi(t)、φi(t)分别为飞行器i在时刻t的高度、经度和纬度;t0表示初始时间,tf表示终端时间;eq.(3.31)为:
19、
20、其中,λi是飞行器经度,φi是飞行器纬度,ri是飞行器高度,vi是飞行器速度,θi是弹道倾角,σi是航迹偏航角,ωe为地球自转角速度,υi为飞行器倾侧角,li是升力加速度,di是阻力加速度,gi为重力加速度。离散化后的多飞行器协同轨迹规划问题可描述为:
21、p3:find xi,l,ui,l,κi,ξi
22、
23、
24、其中,xi,l=[ri,l λi,l φi,l vi,l θi,l σi,l νi,l]t,表示飞行器i在时刻l的高度、经度、纬度、速度、倾角、偏航角和倾侧角,ui为倾侧角变化率,κi为松弛系数,ξi为时间膨胀因子;j0为终端位置偏差最小的目标函数,c2和c3为常数,a、g、c、d为系数矩阵,νmin和νmax表示倾侧角的最小最大值,umin和umax为倾侧角变化率的最小最大值,fj,max分别表示热流、动压和总过载的允许最大值,cr,cλ和cφ为常数,cd,min为协同飞行安全距离,δi为信赖域半径,fj(ri(k),vi(k)),j=1,2,3分别表示线性化后的热流、动压和总过载约束;f'j(ri(k),vi(k)),j=1,2,3分别表示线性化后的热流、动压和总过载约束的偏导数。
25、根据本发明第一方面的方法,所述步骤s3中利用凸优化求解器计算凸化后的多飞行器协同编队轨迹规划问题,迭代更新输出收敛解,即多飞行器协同编队的轨迹,其迭代收敛条件为:
26、
27、其中,为相邻两次迭代解的全局误差变化量。表示来自迭代解的终端状态矢量,k为当前迭代次数,i为第几枚弹,n为离散节点数,ε是一个充分小的常值矢量。
28、根据本发明第一方面的方法,所述综合攻击优势度为
29、
30、其中:kχ,kd,kθ,kσ,kv为加权系数,不同参数设置对应不同的重要程度;相对方位角攻击优势度sχ、相对距离攻击优势度sd、速度倾角攻击优势度sθ、航迹偏航角攻击优势度sσ、相对速度攻击优势度sv。
31、根据本发明第一方面的方法,所述综合攻击优势度包括相对运动信息的攻击优势度,所述相对运动信息的攻击优势度包括相对方位角攻击优势度sχ、相对距离攻击优势度sd、速度倾角攻击优势度sθ、航迹偏航角攻击优势度sσ、相对速度攻击优势度sv:
32、
33、
34、
35、
36、
37、其中,χhyp为当前飞行器相对于编队中心的方位角,χt为当前目标的相对方位角;dhyp为当前飞行器相对于编队中心的距离,dt为相对距离,dmax为根据任务选择的距离常数;θ为实时速度倾角,θf为终端最优速度倾角;δσ为航迹偏航角误差,fσ(δσ,σ0)表示航迹偏航角误差δσ偏离最佳攻击角度区域的最小角度;v为高超声速飞行器到目标的相对速度,vo为综合考虑毁伤能力和控制代价的最优相对速度。
38、根据本发明第一方面的方法,离散化后的多飞行器协同轨迹规划问题可描述为:
39、p3:find xi,l,ui,l,κi,ξi
40、
41、
42、其中,xi,l=[ri,l λi,l φi,l vi,l θi,l σi,l νi,l]t,表示飞行器i在时刻l的高度、经度、纬度、速度、倾角、偏航角和倾侧角,ui为倾侧角变化率,κi为松弛系数,ξi为时间膨胀因子;j0为终端位置偏差最小的目标函数,c2和c3为常数,a、g、c、d为系数矩阵,νmin和νmax表示倾侧角的最小最大值,umin和umax为倾侧角变化率的最小最大值,fj,max分别表示热流、动压和总过载的允许最大值,cr,cλ和cφ为常数,cd,min为协同飞行安全距离,δi为信赖域半径,fj(ri(k),vi(k)),j=1,2,3分别表示线性化后的热流、动压和总过载约束;f'j(ri(k),vi(k)),j=1,2,3分别表示线性化后的热流、动压和总过载约束的偏导数。
43、本发明第二方面公开了一种多飞行器协同智能决策与轨迹在线规划系统,包括计算机设备,该计算机设备用以执行第一方面所述的多飞行器协同智能决策与轨迹在线规划方法的步骤,
44、本发明第三方面公开了一种计算机设备,包括存储器及处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序以实现第一方面所述的多飞行器协同智能决策与轨迹在线规划方法。
45、本发明第四方面公开了一种计算机可读存储介质,该计算机可读存储介质上存储计算机程序,以实现第一方面所述的多飞行器协同智能决策与轨迹在线规划方法。
46、综上,本发明提出的方案具备如下技术效果:本发明提供了一种多飞行器协同智能决策与轨迹在线规划方法、系统及介质,首次针对多约束复杂任务条件下高超声速飞行器协同打击多目标问题,提出了一种综合考虑多维环境感知信息和任务需求的基于智能决策的多飞行器协同编队轨迹在线规划计算方法。通过构建综合考虑战场环境、目标态势以及飞行器自身等多种信息的多维度目标优势度模型和分层规划策略,基于强化学习方法动态获得最优打击目标;然后根据确定的攻击目标和攻击方向,利用凸优化方法在线重规划了满足任务需求的多飞行器协同轨迹。
- 还没有人留言评论。精彩留言会获得点赞!