基于数字图像处理的AGV机器人行走路径智能控制系统的制作方法
本发明涉及agv机器人行走路径控制领域,涉及到基于数字图像处理的agv机器人行走路径智能控制系统。
背景技术:
1、agv机器人行走路径的控制对于实现高效、安全的物流操作以及提升生产效率具有重要意义。通过合理规划路径和对agv机器人行驶状态的调控,可以确保物料的快速、准确传送,实现物流操作的安全性和高效性。
2、现有的agv机器人行走路径的控制方法存在一些不足:第一是路径规划方面,有些路径虽未直接经过障碍物区域,但与障碍物区域距离很近,由于agv机器人自身存在体积,为了agv机器人运行时的安全性,该类路径应被定义为不可行路径,然而现有的路径规划中并没有将该类不可行路径排除,甚至可能被选为agv机器人的最佳行驶路径,进而使得agv机器人的行走路径存在安全隐患。
3、第二是路径筛选方面,现有方法分析路径的指标不够全面,如仅从路线长度、通行所需时长和路面信息角度去评估路径的推荐系数,没有深入分析路径的拐弯次数和拐弯半径以及路径的坡度、平整度和照明亮度等,进而使得现有方法的路径评估体系不够完善,不能很好筛选出agv机器人的最佳路径,从而无法保障agv机器人的高效运行。
4、第三是行驶控制方面,特别是agv机器人经过多个agv机器人通行的拥堵路口时,为防止agv机器人运输货物时与其他agv机器人发生碰撞或者摩擦,需要对agv机器人行驶速度进行控制,如为避让其他agv机器人,选择加速通过或减速通过以及调控加减速力度,同时需要考虑agv机器人搬运货物的状态,确保货物安全和agv机器人行驶安全。
技术实现思路
1、针对上述问题,本发明提出了基于数字图像处理的agv机器人行走路径智能控制系统,实现对agv机器人行走路径控制的功能。
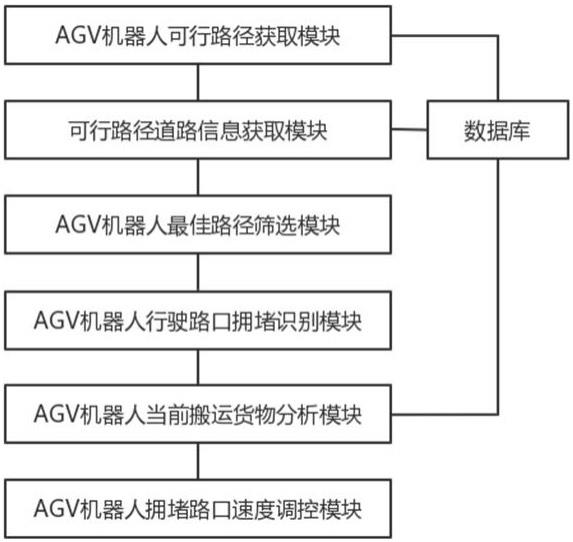
2、本发明解决其技术问题采用的技术方案是:本发明提供基于数字图像处理的agv机器人行走路径智能控制系统,包括:agv机器人可行路径获取模块:用于获取物料仓库的环境信息,根据目标agv机器人的起点位置和终点位置,对目标agv机器人的行走路径进行规划,得到目标agv机器人的各条可行路径。
3、可行路径道路信息获取模块:用于获取目标agv机器人各条可行路径的道路信息,其中道路信息包括路线长度、行驶时长、路况隐患系数和通行技术难度系数。
4、agv机器人最佳路径筛选模块:用于根据目标agv机器人各条可行路径的道路信息,分析目标agv机器人各条可行路径的推荐系数,得到目标agv机器人的最佳可行路径。
5、agv机器人行驶路口拥堵识别模块:用于获取目标agv机器人行走路径前方路口等待通行的各agv机器人的位置和行驶速度,判断目标agv机器人行走路径前方路口是否拥堵,若拥堵,则获取目标agv机器人行走路径前方路口的各竞争agv机器人的到达路口所需时长。
6、agv机器人当前搬运货物分析模块:用于获取目标agv机器人当前搬运货物的基本信息,其中基本信息包括类型、体积、重量、高度和有效托举面积比例系数,分析得到目标agv机器人当前搬运货物的运输安全性系数。
7、agv机器人拥堵路口速度调控模块:用于根据目标agv机器人当前搬运货物的运输安全性系数,获取目标agv机器人在拥堵路口的速度调控方向和速度调节量。
8、数据库:用于存储agv机器人的尺寸信息与物料仓库俯视图中障碍物区域的比例放大倍数之间的关系函数,并存储各类别路段对应的参考行驶速度和各类型货物对应的易损坏系数。
9、在上述实施例的基础上,所述agv机器人可行路径获取模块的具体分析过程为:通过高清摄像头获取物料仓库的全景图像,构建物料仓库的三维模型,获取物料仓库的俯视图,在物料仓库的俯视图中标出各障碍物区域。
10、获取目标agv机器人的尺寸信息,分析物料仓库俯视图中障碍物区域的参考比例放大倍数,对物料仓库俯视图中各障碍物区域进行比例放大,得到物料仓库俯视图中各障碍物区域的膨胀图。
11、在物料仓库俯视图中标出目标agv机器人的起点位置和终点位置,并根据物料仓库俯视图中各障碍物区域的膨胀图,对目标agv机器人的行走路径进行规划,得到目标agv机器人的各条可行路径。
12、在上述实施例的基础上,所述可行路径道路信息获取模块的具体分析过程包括:获取目标agv机器人各条可行路径的路线长度,将其记为,表示第条可行路径的编号,。
13、获取目标agv机器人各条可行路径的行驶时长,将其记为。
14、在上述实施例的基础上,所述可行路径道路信息获取模块的具体分析过程还包括:获取目标agv机器人各条可行路径中各路段的最大坡度,分析目标agv机器人各条可行路径的坡度系数,将其记为。
15、获取目标agv机器人各条可行路径中各路段的平均平整度,分析目标agv机器人各条可行路径的平整度系数,将其记为。
16、获取目标agv机器人各条可行路径中各路段的路面积水面积,分析目标agv机器人各条可行路径的路面积水系数,将其记为。
17、获取目标agv机器人各条可行路径中各路段的照明亮度,分析目标agv机器人各条可行路径的照明亮度系数,将其记为。
18、通过分析公式得到目标agv机器人各条可行路径的路况隐患系数,其中表示自然常数,、、、分别表示预设的坡度系数、平整度系数、路面积水系数和照明亮度系数的权重因子。
19、在上述实施例的基础上,所述可行路径道路信息获取模块的具体分析过程还包括:获取目标agv机器人各条可行路径中各次拐弯的角度,将其记为,表示第次拐弯的编号,。
20、通过分析公式得到目标agv机器人各条可行路径的通行技术难度系数,其中表示预设的单位拐弯角度对应的影响因子。
21、在上述实施例的基础上,所述agv机器人最佳路径筛选模块的具体分析过程为:通过分析公式得到目标agv机器人各条可行路径的推荐系数,其中表示可行路径的数量,、、、分别表示预设的路线长度、行驶时长、路况隐患系数和通行技术难度系数的权值,+++=1。
22、将目标agv机器人各条可行路径的推荐系数进行相互比较,将最大推荐系数对应的可行路径作为目标agv机器人的最佳可行路径。
23、在上述实施例的基础上,所述agv机器人行驶路口拥堵识别模块的具体过程为::以目标agv机器人行走路径前方路口为圆心,以设定距离为半径作圆,得到目标agv机器人行走路径前方路口的监测范围,将其记为前方路口监测范围。
24、获取前方路口监测范围内的各agv机器人和各agv机器人的行驶方向,分析得到前方路口等待通行的各agv机器人,进一步获取前方路口等待通行的各agv机器人的位置和行驶速度,分析得到前方路口等待通行的各agv机器人抵达路口的时间。
25、获取目标agv机器人抵达路口的时间。
26、将前方路口等待通行的各agv机器人抵达路口时间与目标agv机器人抵达路口时间进行比较,得到前方路口等待通行的各agv机器人抵达路口时间与目标agv机器人抵达路口时间之间的间隔时长,将其记为前方路口等待通行的各agv机器人的会车间隔时长。
27、:将前方路口等待通行的各agv机器人的会车间隔时长与预设的会车间隔时长阈值进行比较,若前方路口等待通行的各agv机器人的会车间隔时长均大于或等于预设的会车间隔时长阈值,则目标agv机器人行走路径前方路口不拥堵,反之,则目标agv机器人行走路径前方路口拥堵,并执行。
28、:将会车间隔时长小于预设的会车间隔时长阈值的agv机器人记为目标agv机器人行走路径前方路口的竞争agv机器人,统计得到目标agv机器人行走路径前方路口的各竞争agv机器人,进一步获取目标agv机器人行走路径前方路口的各竞争agv机器人的到达路口所需时长。
29、在上述实施例的基础上,所述agv机器人当前搬运货物分析模块的具体分析过程为:获取目标agv机器人当前搬运货物的类型,提取数据库中存储的各类型货物对应的易损坏系数,筛选得到目标agv机器人当前搬运货物的易损坏系数,将其记为。
30、获取目标agv机器人当前搬运货物的体积、重量和高度,将其分别记为、、。
31、获取目标agv机器人当前搬运货物的托举面的总面积,将其记为,并获取目标agv机器人当前搬运货物托举面中与目标agv机器人相接触的区域的面积,将其记为。
32、通过分析公式得到目标agv机器人当前搬运货物的有效托举面积比例系数。
33、通过分析公式得到目标agv机器人当前搬运货物的运输安全性系数,其中、、分别表示预设的货物体积、重量和高度的阈值。
34、在上述实施例的基础上,所述agv机器人拥堵路口速度调控模块的分析过程为::将目标agv机器人当前搬运货物的运输安全性系数与预设的运输安全性系数阈值进行比较,若目标agv机器人当前搬运货物的运输安全性系数大于或等于预设的运输安全性系数阈值,则目标agv机器人在拥堵路口的速度调控方向为加速,并执行,反之,则目标agv机器人在拥堵路口的速度调控方向为减速,并执行。
35、:获取目标agv机器人到达路口所需时长、当前速度和其与前方路口的距离,将其分别记为、和。
36、将目标agv机器人行走路径前方路口的各竞争agv机器人的到达路口所需时长进行相互比较,得到竞争agv机器人到达路口所需时长的最小值,将其记为。
37、通过分析公式得到
38、目标agv机器人在拥堵路口的速度调节量,其中表示预设的目标agv机器人加速时速度调节量的补偿量,。
39、:获取目标agv机器人到达路口所需时长、当前速度和其与前方路口的距离,将其分别记为、和。
40、将目标agv机器人行走路径前方路口的各竞争agv机器人的到达路口所需时长进行相互比较,得到竞争agv机器人到达路口所需时长的最大值,将其记为。
41、通过分析公式得到目标agv机器人在拥堵路口的速度调节量,其中表示预设的目标agv机器人减速时速度调节量的补偿量,。
42、相对于现有技术,本发明所述的基于数字图像处理的agv机器人行走路径智能控制系统以下有益效果:1.本发明通过获取目标agv机器人的尺寸信息,分析物料仓库俯视图中各障碍物区域的膨胀图,结合目标agv机器人的起点位置和终点位置,规划目标agv机器人的各条可行路径,能够缩小agv机器人的可行路径数量范围,有利于高效、精准地筛选agv机器人的最佳路径。
43、2.本发明通过获取目标agv机器人各条可行路径的路线长度、行驶时长、路况隐患系数和通行技术难度系数,分析目标agv机器人各条可行路径的推荐系数,得到目标agv机器人的最佳可行路径,丰富路径评估指标的多样化,能够完善路径评估体系,进而便于筛选出agv机器人的最佳路径,保障agv机器人的高效运行。
44、3.本发明通过获取目标agv机器人当前搬运货物的基本信息,分析目标agv机器人当前搬运货物的运输安全性系数,进一步得到目标agv机器人在拥堵路口的速度调控方向和速度调节量,实现在拥堵路口对agv机器人的行驶速度进行调控,确保货物安全和agv机器人行驶安全。
- 还没有人留言评论。精彩留言会获得点赞!