转角实时反馈调节的高精度压电二维指向机构
本发明涉及二维指向机构,具体涉及转角实时反馈调节的高精度压电二维指向机构。
背景技术:
1、随着航空航天技术的发展,为实现新一代的星间激光通讯,对高偏角分辨率、高可靠性的二维指向机构的设计提出了要求。传统的压电二维指向机构虽然具有高的偏转角分辨率,但其机械机构存在复杂耦合,难以获得的控制能力;受限于机构大小,内部接触力难以测量。
技术实现思路
1、为了克服上述现有技术存在的问题,本发明旨在提供转角实时反馈调节的高精度压电二维指向机构,通过在承载帽接触面布置半圆形电容环,使得指向机构工作时的偏转角度可以通过测量接触点形变引起的电容变化间接获得,使得指向机构能够实现实时反馈调节输出,此外,通过非对称柔性铰链进行设计,可以将柔性铰链的竖向位移转化为平台的无偏移转动。
2、为达到上述目的,本发明所采用的技术方案是:
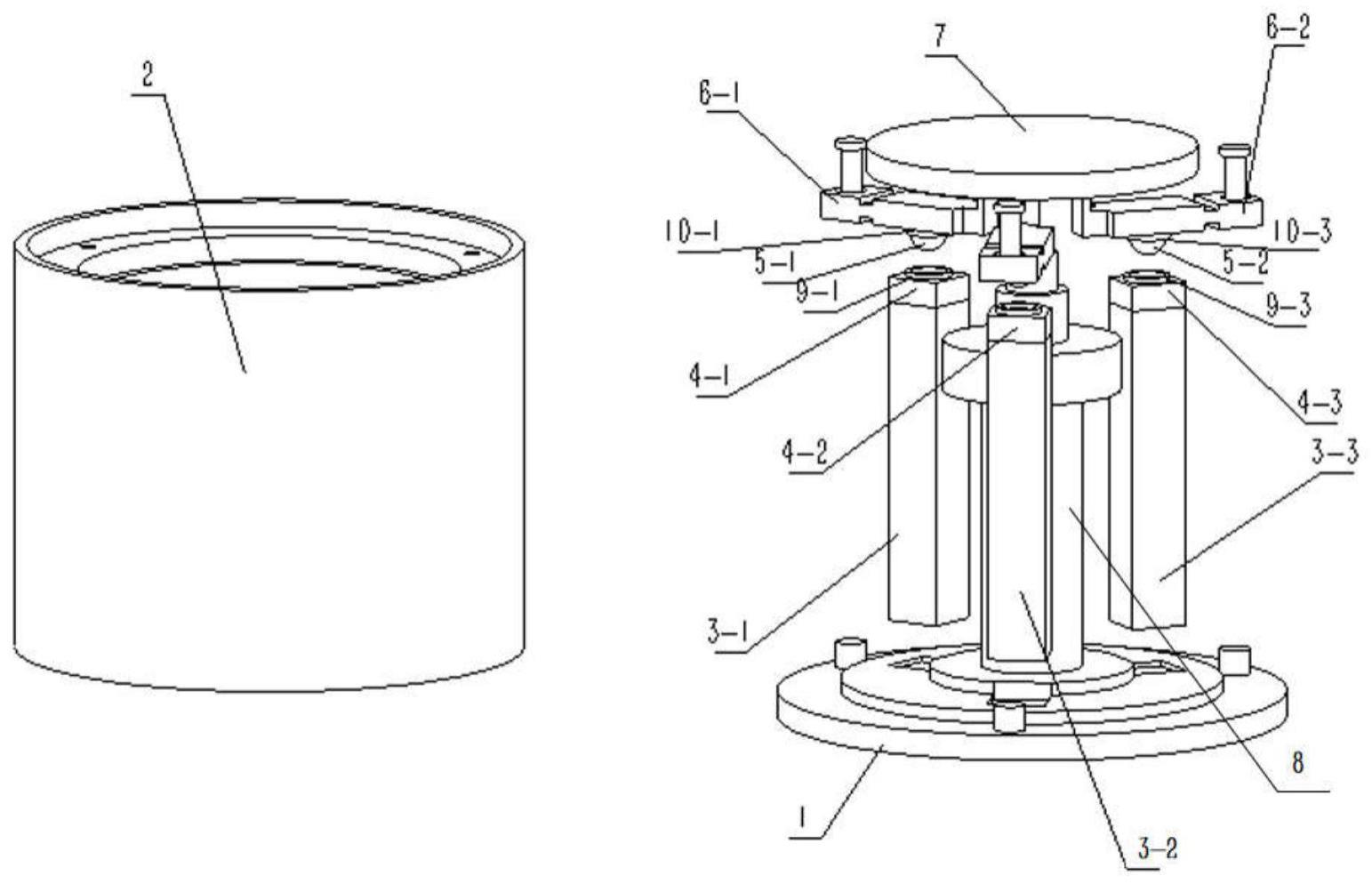
3、转角实时反馈调节的高精度压电二维指向机构,包括底座1,固定在底座上的套筒2,套筒2的内腔设置有三个沿圆周均匀布置的第一压电堆3-1、第二压电堆3-2和第三压电堆3-3,第一压电堆3-1、第二压电堆3-2和第三压电堆3-3均为竖向布置,其一端坐落在基座1上,另一端均设置有相应的第一承载帽4-1、第二承载帽4-2和第三承载帽4-3,所述套筒2的上端连接有转向平台,所述转向平台包括上端的平台7,平台7的下侧沿圆周均匀布置的三个相同结构的非对称柔性铰链,分别为第一非对称柔性铰链11-1、第二非对称柔性铰链11-2和第三非对称柔性铰链11-3,分别连接在第一非对称柔性铰链11-1、第二非对称柔性铰链11-2和第三非对称柔性铰链11-3下端的第一杠杆放大机构6-1、第二杠杆放大机构6-2、第三杠杆放大机构6-3,相应设置在三个杠杆放大机构外端的三个柔性铰链;柔性铰链的根部连接在套筒2的上端,平台7通过带有柔性铰链的中心杆8与底座1相连,所述第一非对称柔性铰链11-1、第二非对称柔性铰链11-2和第三非对称柔性铰链11-3的上端菱形柔性铰链的外端连接梁刚度大于内端连接梁刚度;所述第一承载帽4-1、第二承载帽4-2、第三承载帽4-3在上端面分别布置有第一半圆形下电容环9-1、第二半圆形下电容环9-2、第三半圆形下电容环9-3,所述第一杠杆放大机构6-1竖直对应承载帽的位置设置有第一绝缘半球体5-1,第二杠杆放大机构6-2竖直对应承载帽的位置设置有第二绝缘半球体5-2,第三杠杆放大机构6-3竖直对应承载帽的位置设置有第三绝缘半球体5-3,第一绝缘半球体5-1的下端与第一承载帽4-1点接触,第二绝缘半球体5-2的下端与第二承载帽4-2点接触,第三绝缘半球体5-3的下端与第三承载帽4-3点接触,第一绝缘半球体5-1在靠近第一杠杆放大机构6-1的上端布置有第一半圆形上电容环10-1,第二绝缘半球体5-2均在靠近第二杠杆放大机构6-2的上端布置有第二半圆形上电容环10-1,第三绝缘半球体5-3在靠近第三杠杆放大机构6-3的上端布置有第三半圆形上电容环10-3,第一半圆形上电容环10-1与第一半圆形下电容环9-1构成电容器,同样地,第二半圆形上电容环10-2和第二半圆形下电容环9-2、第三半圆形上电容环10-3和第三半圆形下电容环9-3也分别构成电容器;
4、给三个压电堆分别施加电压,获得其竖向伸长量,通过绝缘半球体与承载帽的点接触及杠杆放大机构将伸长量转化为指向平台的偏转,由于三个杠杆放大机构为三轴共线交于平台圆心,因此各柔性铰链的差动位移合成为绕平台圆心的转动和竖向位移,由于非对称柔性铰链的上端菱形柔性铰链的外端连接梁刚度大于内端连接梁刚度,故外侧竖向位移大于内侧竖向位移,差动位移使得平台产生绕轴心与非对称柔性铰链连线的偏转角,三个非对称柔性铰链引起的平台偏转角合成为绕轴心的转动;指向机构工作时的偏转角度通过测量绝缘半球体与承载帽的接触点形变引起的电容变化间接获得,使得指向机构能够实现实时反馈调节的输出。
5、第一半圆形下电容环9-1、第一半圆形上电容环10-1、第一绝缘半球体5-1和第一承载帽4-1构成转角测量构件,在指向机构工作过程中,通过向第一压电堆3-1加电压,第一绝缘半球体5-1和第一承载帽4-1的接触面承受接触力会变大,承载帽与绝缘半球体的间距会变化,半圆形电容环之间的电容大小随之发生改变,通过测量电容量,即得到第一承载帽4-1与第一绝缘半球体5-1之间接触力的变化,进而得到指向机构的实际输出角度,使用pid反馈控制系统调节指向机构的实际输出角度,即能够提高指向机构的转角精度;通过对接触处第一半圆形上电容环10-1与第一半圆形下电容环9-1之间电容值的监控,间接得到第一绝缘半球体5-1与第一承载帽4-1之间的接触力大小,在接触力达到结构容许最大压力时对第一压电堆3-1断电锁止,即能提高指向机构的使用寿命;第二绝缘半球体5-2与第二承载帽4-2之间接触力、第三绝缘半球体5-3与第三承载帽4-3之间接触力的测量方式与上述测量方式相同。
6、所述套筒2的上端和下端在圆周位置以120度为间隔开有三个螺纹孔,其上端通过三个上端螺栓分别连接第一杠杆放大机构6-1、第二杠杆放大机构6-2、第三杠杆放大机构6-3的底部,套筒2下端通过三个底端螺栓连接底座1,通过旋紧三个上端螺栓以及三个下端螺栓分别为设置于套筒2内腔的第一压电堆3-1、第二压电堆3-2和第三压电堆3-3提供预紧力。
7、套筒2与第一杠杆放大机构6-1、第二杠杆放大机构6-2、第三杠杆放大机构6-3之间的预紧力可调,套筒2与底座1之间的预紧力可调,根据电容器的电容与极板距离的关系,通过调节上端螺栓以及下端螺栓的螺栓紧度,改变第一绝缘半球体5-1与第一承载帽4-1、第二绝缘半球体5-2与第二承载帽4-2、第三绝缘半球体5-3与第三承载帽4-3的接触形变,实时观测电容大小,随着螺栓拧紧,增大预紧力的同时减少了电容器极板距离,产生的电容值增大,通过实验测得指向机构无预紧力时的半圆形上电容环与半圆形下电容环之间的电容大小,即能通过监测电容值调控指向机构预紧力。
8、所述转向平台的平台7、第一非对称柔性铰链11-1、第二非对称柔性铰链11-2、第三非对称柔性铰链11-3、第一杠杆放大机构6-1、第二杠杆放大机构6-2、第三杠杆放大机构6-3均为一体化设计。
9、第一非对称柔性铰链11-1、第二非对称柔性铰链11-2、第三非对称柔性铰链11-3、第一杠杆放大机构6-1、第二杠杆放大机构6-2、第三杠杆放大机构6-3均采用慢走丝线切割工艺加工。
10、和现有技术相比,本发明具有如下优点:
11、1、本发明通过在承载帽接触面布置半圆形电容环,使得指向机构工作时的偏转角度可以通过测量接触点形变引起的电容变化间接获得,使得指向机构能够实现实时反馈调节输出,此外,通过对非对称柔性铰链进行设计,可以将柔性铰链的竖向位移转化为平台的无偏移转动。
12、2、本发明采用接触形变引起的电容变化作为反馈信号控制,调节精度高,响应速度快。
13、3、本发明的三个杠杆放大机构具有相同结构,也即具有相同的频响特性,有利于简化反馈控制。
14、4、本发明结构紧凑,加工方便,仅三个压电堆和电容器即可完成控制,关键部件均采用慢走丝线切割工艺加工,工序简单易于制造。
15、5、转动平台的非对称柔性铰链及杠杆放大机构三者为一体化设计,从而提高了机械传动精度进而提高指向机构偏转角输出的能力。
- 还没有人留言评论。精彩留言会获得点赞!