一种面向高陡边坡的单镜头无人机多姿态摄影方法
本发明涉及无人机航线规划,尤其涉及一种面向高陡边坡的单镜头无人机多姿态摄影方法。
背景技术:
1、高陡边坡因其坡度陡、高度大,基岩裸露且岩体节理裂隙发育,传统人工进行边坡工程地质调查方法受陡峻的山势、复杂的地质环境制约,人员可能无法到达调查区域开展详细调查工作,调查难度大、危险性高、效率低,调查的信息有限或无法实现调查工作,限制了工程地质参数的获取从而影响边坡稳定性评价。
2、为此,引入无人机摄影测量技术进行高陡边坡的地质灾害调查具有重要意义,该技术能够安全、快速、精确地获取坡面的影像数据,从而查明高陡边坡危岩体特征和岩体结构几何参数,减少地形条件对参数获取的约束。但是,传统无人机竖直摄影测量技术是垂直于地面进行拍摄,针对高陡边坡,虽然可以很好地还原边坡的整体结构,但由于坡面的倾角较大,竖直摄影光轴与坡面的夹角很小,边坡表面岩石的细部结构信息被压缩而不能得到很好的重建,且存在摄影盲区及纹理拉花现象。如果采用倾斜摄影测量技术则可以有效提高影像获取的数量及摄影对象的重叠度,但针对高陡边坡,存在无效影像远远大于有效影像、分辨率不一问题,且倾斜摄影测量搭载的相机较为沉重,设备成本较高。
3、此外,在获取高陡边坡岩体数据时,还会遇到树林遮挡,以及坡面转向时,存在转角处重叠度不够问题,上述问题会压缩边坡信息、易产生摄影盲区,建模时容易产生空洞和纹理拉花。为此,从精细化观测、节约成本和提高工作效率等获取高陡边坡工程地质参数的需求出发,如何突破上述摄影测量技术的限制,探寻一种成本低、工作流程简捷、更重要的是能实现高陡边坡精细化观测及建模的新方法,成为当前亟待解决的关键问题。
技术实现思路
1、鉴于现有技术的上述缺点、不足,本发明提供一种面向高陡边坡的单镜头无人机多姿态摄影方法,其解决了现有技术中获取高陡边坡工程地质参数中观测不精细、成本高和工作效率低的技术问题。
2、为了达到上述目的,本发明采用的主要技术方案包括:
3、本发明实施例提供一种面向高陡边坡的单镜头无人机多姿态摄影方法,所述方法包括:
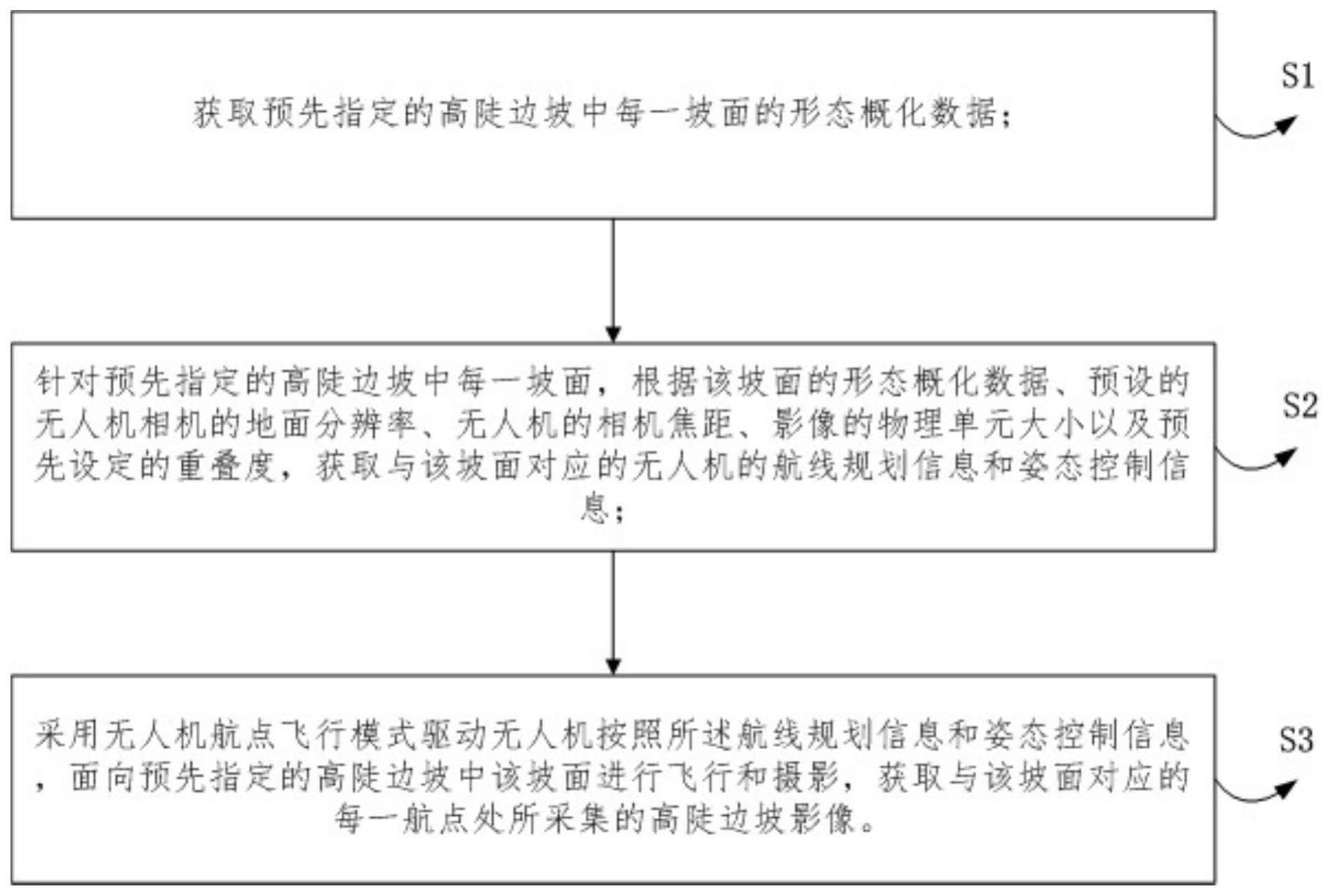
4、s1、获取预先指定的高陡边坡中每一坡面的形态概化数据;
5、其中预先指定的高陡边坡包括至少一个坡面;
6、其中,任一坡面的形态概化数据包括该坡面的:边坡坡长、边坡坡高、边坡走向、边坡倾角;
7、s2、针对预先指定的高陡边坡中每一坡面,根据该坡面的形态概化数据、预设的无人机相机的地面分辨率、无人机的相机焦距、影像的物理单元大小以及预先设定的重叠度,获取与该坡面对应的无人机的航线规划信息和姿态控制信息;
8、所述预先设定的重叠度包括旁向重叠度和航向重叠度;
9、所述航线规划信息包括:无人机的航高、航线条数、每条航线上的航点的数量、每一航点的坐标经纬度数据;
10、所述姿态控制信息包括:无人机在任一航点所对应的多对控制航向角和控制俯仰角;
11、s3、采用无人机航点飞行模式驱动无人机按照所述航线规划信息和姿态控制信息,面向预先指定的高陡边坡中该坡面进行飞行和摄影,获取与该坡面对应的每一航点处所采集的高陡边坡影像。
12、优选地,所述方法还包括:
13、s4、基于该坡面对应的每一航点处所采集的高陡边坡影像,获取该坡面对应的三维模型。
14、优选地,
15、无人机的航高由公式(1)计算得到;
16、所述公式(1)为:
17、
18、其中,h为无人机的航高;
19、f为无人机的相机焦距;
20、gsd为预设的无人机相机所摄影像的地面分辨率;
21、a为影像的物理单元大小。
22、优选地,
23、所述航线条数为由公式(2)计算得到;
24、所述公式(2)为:
25、m=(h0/sinα+d)/d;
26、m为航线条数;
27、α为边坡倾角;
28、h0为边坡坡高;
29、d=ly(1-qy%)m;
30、ly=a*w;
31、w为影像的行数;
32、qy%为旁向重叠度;
33、m为摄影比例尺的分母;
34、每条航线上的航点的数量由公式(3)计算得到;
35、所述公式(3)为:
36、n=(s+b+b)/b+1;
37、n为每条航线上的航点的数量;
38、s为边坡坡长;
39、b=lx(1-px%)m;
40、lx=a*l;
41、l为影像的列数;
42、px%为航向重叠度。
43、优选地,
44、每一航点的经纬度数据是通过将该航点的坐标数据按照高斯反算公式换算得到的;
45、其中,该坡面所对应的第i条航线中的第j个航点的坐标数据为(xij,yij,hij);
46、xij=xa+b(j-2)cosβcosθ+d(i-1)cosαsinθ-hsinαsinθ;
47、yij=ya+b(j-2)cosβsinθ-d(i-1)cosαcosθ+hsinαcosθ;
48、hij=ha+b(j-2)sinβ+d(i-1)sinα+hcosα;
49、其中,
50、δxab=xa-xb;δyab=ya-yb;δhab=ha-hb;
51、(xa,ya)为根据高斯坐标正算公式分别将该坡面的两底角点左侧底角点的经度纬度(la,ba)换算得到的高斯投影坐标值;
52、(xb,yb)为根据高斯坐标正算公式分别将该坡面的两底角点右侧底角点的经纬度(lb,bb)换算得到的高斯投影坐标值;
53、ha为该坡面的两底角点左侧底角点a的高程数据;
54、hb为该坡面的两底角点右侧底角点b的高程数据;
55、i是该坡面所对应的第i条航线;
56、j是该坡面所对应的第i条航线中的第j个航点;
57、xij是该坡面所对应的第i条航线的第j个航点的高斯投影的x坐标值;
58、yij是该坡面所对应的第i条航线的第j个航点的高斯投影的y坐标值;
59、hij是该坡面所对应的第i条航线的第j个航点的高程;
60、其中,该坡面所对应的第i条航线中的第j个航点的坐标经纬度数据为(lij,bij,hij);
61、所述lij为该坡面所对应的第i条航线的第j个航点的经度;
62、所述bij为该坡面所对应的第i条航线的第j个航点的纬度。
63、优选地,所述s2中的姿态控制信息的获取方式包括:
64、s21、基于该坡面的边坡走向获取基础航向角,以及基于该坡面的边坡倾角获取基础俯仰角;
65、s22、基于预先设定的第一偏角和所述基础航向角、预先设定的第二偏角和所述基础俯仰角,获取无人机在与该坡面对应的任一航点的多对控制航向角以及控制俯仰角。
66、优选地,所述s21具体包括:
67、基于该坡面的边坡走向,采用公式(4)获取基础航向角;
68、所述公式(4)为:
69、
70、为基础航向角;
71、θ为边坡走向;
72、基于边坡倾角,采用公式(5)获取基础俯仰角;
73、所述公式(5)为:
74、w=α-90°;
75、w为基础俯仰角;
76、α为边坡倾角。
77、优选地,所述s22具体包括:基于预先设定的第一偏角、所述基础航向角、预先设定的第二偏角和所述基础俯仰角,获取无人机在与该坡面对应的任一航点的五对控制航向角以及控制俯仰角,包括:第一对控制航向角以及控制俯仰角;第二对控制航向角以及控制俯仰角;第三对控制航向角以及控制俯仰角;第四对控制航向角以及控制俯仰角;第五对控制航向角以及控制俯仰角;
78、其中,第一对控制航向角以及控制俯仰角中的控制航向角与基础航向角相同,控制俯仰角与基础俯仰角相同;
79、第二对控制航向角以及控制俯仰角中的控制航向角与基础航向角相同,控制俯仰角为基础俯仰角加上第二偏角;
80、所述预先设定的第二偏角为30°;
81、第三对控制航向角以及控制俯仰角中的控制航向角为基础航向角减去第一偏角,控制俯仰角与基础俯仰角相同;
82、所述预先设定的第一偏角为45°;
83、第四对控制航向角以及控制俯仰角中的控制航向角与基础航向角相同,控制俯仰角为基础俯仰角减去第二偏角;
84、第五对控制航向角以及控制俯仰角中的控制航向角为基础航向角加上第一偏角,控制俯仰角与基础俯仰角相同。
85、优选地,
86、其中,针对预先指定的高陡边坡中任一坡面的所述边坡坡长,采用公式(6)计算得到;
87、所述公式(6)为:
88、
89、针对预先指定的高陡边坡中任一坡面的边坡走向,采用公式(7)计算得到;
90、其中,所述公式(7)为:
91、θ=arctan(δyab/δxab);
92、θ为边坡走向;
93、其中,预先指定的高陡边坡中任一坡面的边坡倾角α和边坡坡高h0均为预先测量得到。
94、优选地,
95、若预先指定的高陡边坡包括多个依次相邻的坡面;
96、其中,任意相邻的两个坡面的左边的坡面的右下角点坐标为右边的坡面的左下角点坐标。
97、本发明的有益效果是:本发明的一种面向高陡边坡的单镜头无人机多姿态摄影方法,由于采用无人机航点飞行模式驱动无人机按照航线规划信息和姿态控制信息,面向预先指定的高陡边坡中该坡面进行飞行和摄影,而航线规划信息和姿态控制信息是通过针对预先指定的高陡边坡中每一坡面,根据该坡面的形态概化数据、预设的无人机相机的地面分辨率、无人机的相机焦距、影像的物理单元大小以及预先设定的重叠度得到的,相对于现有技术而言,无人机按照所述航线规划信息和姿态控制信息更为精细,可以消除或减弱摄影盲区和建模的纹理拉花现象;另外,本发明的一种面向高陡边坡的单镜头无人机多姿态摄影方法现对于现有技术而言,方法流程简单,提高了工作效率。同时,采用本发明的一种面向高陡边坡的单镜头无人机多姿态摄影方法不受无人机与镜头的限制,仅利用单镜头无人机即可完成多姿态拍摄,且只要能够导入kml文件的无人机都可以适配,极大地节约了设备成本和降低了对设备的载重条件要求,且设备重量轻利于便携,方法普适性高。
- 还没有人留言评论。精彩留言会获得点赞!