一种四旋翼飞行器非奇异预定义时间滑模姿态控制方法
本发明属于四旋翼飞行器姿态控制,针对四旋翼飞行器执行具有严格系统响应时间要求的一类任务,提出一种四旋翼飞行器非奇异预定义时间滑模姿态控制方法。
背景技术:
1、四旋翼飞行器是一种由十字交叉或x型交叉的4个螺旋桨组成的6自由度欠驱动系统,通过改变4个轴上的电机输出电压来控制旋翼的转速与方向,以此实现飞行器的垂直、俯仰、横滚和偏航等飞行动作控制。四旋翼飞行器因其构造简单,飞行姿态灵活,动力效率高等特点而广泛应用于军用领域和民用领域。
2、四旋翼飞行器通常采用姿态内环控制,位置外环控制,位置变化需要通过调整姿态来实现,姿态跟踪精度直接影响系统控制性能。而在许多实际应用场景中,任务需求不仅仅对四旋翼飞行器姿态跟踪的精度提出了挑战,更是对姿态跟踪的快速性提出了严格的要求。比如需要四旋翼飞行器在指定时间内到达指定位置或是呈现指定姿态,这一类任务对于快速性有明确且硬性的要求,需要姿态控制系统能够事先设定好满足任务需求的控制参数,且能够给出清晰准确的系统性能描述。
3、预定义时间稳定理论是有限时间稳定理论的一种,由固定时间稳定理论发展而来,系统收敛时间上界不依赖系统初始状态,时间上界可预先设计,不再包含于复杂的隐式函数内,且对外界干扰具有鲁棒性,具备更高的收敛精度。然而目前的预定义时间稳定理论所给出的函数形式,在对其关于时间求导后会产生负的幂次项,导致在控制器中产生奇异性问题,从而影响实际控制效果。目前关于处理预定义时间稳定理论奇异性的方法,许多研究采用分段函数的方法,通过在原点附近的领域内替换原有的函数值来避免奇异性问题的产生,然而这一类方法则会导致控制器的不连续,对执行器并不友好。
4、因此,针对在执行具有严格快速性要求任务的四旋翼飞行器系统,寻找一种能够在预先设置好的时间内收敛到指定界内,同时又能在保证控制器连续的情况下避免奇异性问题的控制方法是十分有必要的。
技术实现思路
1、为了克服现有技术的不足,使得系统状态可以在预定义时间内收敛到指定界内,同时保证控制器连续的前提避免奇异性问题,本发明提出了一种四旋翼飞行器非奇异预定义时间滑模姿态控制方法,所提方法设计了非奇异预定义时间滑模变量,构造了辅助函数,然后设计了非奇异预定义时间滑模控制器。该设计可以保证四旋翼飞行器系统姿态在预定义时间内收敛到指定界内,该预定义时间可以在设置控制器时事先给定,同时避免系统存在的奇异性问题,保证控制器的连续,提高姿态跟踪精度。
2、为了解决上述技术问题所提出的技术方案如下:
3、一种四旋翼飞行器非奇异预定义时间滑模姿态控制方法,包括以下步骤:
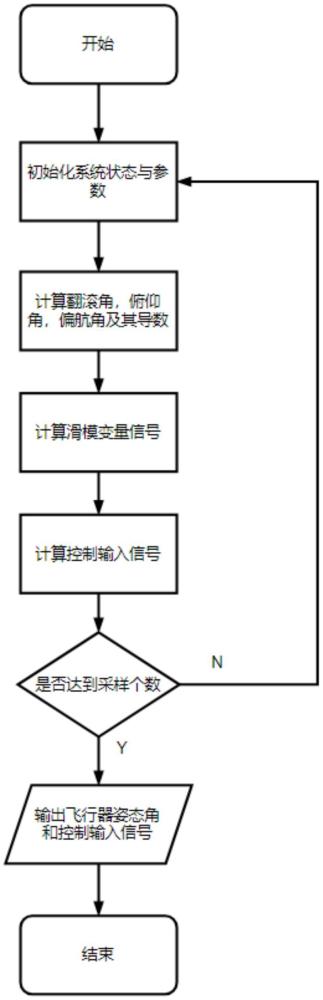
4、步骤1,建立四旋翼飞行器系统的动力学模型,初始化系统的状态与控制参数,过程如下:
5、1.1四旋翼飞行器的动力学表示为:
6、
7、其中,ωx,ωy,ωz分别表示在机体坐标系下四旋翼飞行器的翻滚轴姿态角速度,俯仰轴姿态角速度和偏航轴姿态角速度;分别为ωx,ωy,ωz关于时间t的一阶导数,表示在机体坐标系下四旋翼飞行器的翻滚轴姿态角加速度,俯仰轴姿态角加速度和偏航轴姿态角加速度;jxx,jyy,jzz分别表示在机体坐标系下四旋翼飞行器的翻滚轴转动惯量,俯仰轴转动惯量和偏航轴转动惯量;τx,τy,τz分别表示机体坐标系下作用在四旋翼飞行器翻滚轴、俯仰轴和偏航轴上的控制力矩;dx,dy,dz分别表示机体坐标系下作用在四旋翼飞行器翻滚轴、俯仰轴和偏航轴控制通道上的外部扰动;×表示叉乘;
8、1.2结合式(1),得到四旋翼飞行器运动时各轴的姿态角加速度表达式为:
9、
10、1.3定义如下状态变量:
11、
12、其中,φ,θ,ψ分别表示在机体坐标系下四旋翼飞行器的翻滚轴姿态角、俯仰轴姿态角和偏航轴姿态角;x1表示姿态角状态量,x2表示姿态角速度状态量;
13、1.4结合式(3),构建下面形式的状态方程:
14、
15、其中,分别表示x1,x2的一阶导数;表示控制力矩;
16、
17、
18、步骤2,以四旋翼飞行器翻滚轴为例,设计非奇异预定义时间滑模变量,过程如下:
19、2.1结合式(4),得到如下四旋翼飞行器翻滚轴姿态角控制系统:
20、
21、其中,xφ1,xφ2分别表示在机体坐标系下四旋翼飞行器的翻滚轴姿态角和翻滚轴姿态角速度,分别表示xφ1,xφ2的一阶导数;uφ=τx,分别表示机体坐标系下四旋翼飞行器的翻滚轴控制力矩、翻滚轴系统项和翻滚轴控制通道上的外部扰动;
22、2.2对于四旋翼飞行器的实际飞行场景,飞行器的翻滚角是有界的,且受到的外部扰动dφ存在上界,记为dφ的上界值,即
23、2.3定义如下姿态角跟踪误差:
24、e1=xφ1-xφr (6)
25、其中,e1表示四旋翼飞行器翻滚轴姿态角跟踪误差,xφr表示四旋翼飞行器期望翻滚轴姿态角;
26、对式(6)关于时间t求一阶导:
27、
28、其中,分别表示e1,xφr的一阶导数;
29、2.4对于任意常数标量r和ζ,定义sigr(ζ)函数为:
30、sigr(ζ)=|ζ|rsign(ζ) (8)
31、其中,sign(·)表示为符号函数;
32、2.5设计如下非奇异预定义时间滑模变量:
33、
34、其中,s表示为非奇异预定义时间滑模变量,表示为滑模变量常系数,tc>0表示为预定义时间常数;
35、步骤3,设计非奇异预定义时间滑模控制器,过程如下:
36、3.1对式(9)关于时间t进行求导得:
37、
38、其中,分别表示的一阶导数;
39、3.2令显然g≥0,改写式(10)为:
40、
41、3.3为了避免奇异性问题,构造辅助函数如下:
42、
43、3.4利用式(12)改写式(11)为:
44、
45、3.5结合式(13),设计非奇异预定义时间滑模控制器为:
46、
47、其中,表示的一阶导数,0<γ2<1表示为常数,tc2>0表示为常数;
48、3.6选择下面的李亚普诺夫函数:
49、
50、3.7对式(15)进行求导得:
51、
52、其中,表示v1(t)的一阶导数;
53、将式(13)和式(14)代入式(16),得到即判定系统是稳定的。
54、本发明设计了一种四旋翼飞行器非奇异预定义时间滑模姿态控制方法,提出的预定义时间滑模可以实现飞行器姿态在预定义时间内收敛至指定界内,采用的非奇异处理策略可以有效保证控制器的连续,提高姿态跟踪的精度。
55、本发明技术构思:针对在执行具有严格快速性要求任务的四旋翼飞行器系统,本发明采用预定义时间稳定理论来设计预定义时间滑模面,并通过滑模面的设计和辅助函数的构造来处理奇异性问题,设计非奇异预定义时间控制器使得系统在预设时间内收敛到指定界内,保证控制信号的连续,在满足快速性要求的同时提高姿态跟踪精度。本发明提出了一种可以实现预定义时间状态收敛的四旋翼飞行器非奇异预定义时间滑模姿态控制方法,保证了四旋翼飞行器系统可以达到指定快速性的控制效果。
56、本发明的有效效果:实现四旋翼飞行器姿态角的预定义时间跟踪,解决奇异性问题,提高姿态跟踪精度。
- 还没有人留言评论。精彩留言会获得点赞!