一种基于结构分析法的汽车AEB故障诊断方法
本发明属于智能驾驶汽车安全故障诊断领域,具体涉及一种基于结构分析法的汽车aeb(autonomous emergency braking,自动紧急制动系统)故障诊断方法。
背景技术:
1、随着科技水平的不断进步和发展,自动驾驶汽车各个系统或功能的状态监测,成为了保障汽车安全非常重要的部分。车载微控制器的快速发展,导致在汽车上通过电子系统和相关软件实现的功能激增。使用故障诊断算法来减少制造商产生大量保修成本的误报,一直是汽车制造商和供应商关注的问题。汽车业界内的一些研究表明,目前的某些故障误报率居高不下。在进行容错控制以消除或缓解危害影响之前,首先要进行故障诊断,包括故障检测和隔离,以告知车辆控制器采取正确的容错控制措施,并警告驾驶员车辆需要维修。
2、aeb系统作为一个重要的主动安全系统,能够有效的减少汽车碰撞事故,保护人身和财产安全。当aeb系统发生故障时,驾驶员与乘车人的安全受到极大威胁,因此对aeb系统进行安全分析与故障诊断分析,能够在故障出现的早期提醒驾驶员并发送给系统,使驾驶员和维修人员及时发现系统故障或使系统提前进行容错控制,减缓甚至消除aeb系统故障所带来的风险。因此对aeb系统进行安全分析与基于模型的故障诊断分析,能够有效识别aeb系统的故障情况,提升驾驶安全性,具有较强的理论研究价值与实际应用意义。
3、aeb系统的功能主要包括三个方面:①预警功能,当控制系统结合自身车况与路况发现车辆处于危险状态时,系统通过报警灯、报警蜂鸣器提醒驾驶员,一些高级系统会采用方向盘震动的方式提醒驾驶员,促使驾驶员采取制动动作。②自动紧急制动功能,如果在提醒过驾驶员制动之后,驾驶员没有采取制动措施,则系统将进行自动紧急制动,避免发生碰撞或最大限度地降低事故发生时的车速,最大程度的减小碰撞带来的损伤。③制动尾灯亮起,无论是驾驶员主动制动还是系统自动紧急制动,制动尾灯都应伴随制动动作亮起,以提醒后车进行制动,防止追尾事故的发生。
4、在汽车实际行驶的过程中,面对的情景复杂多样,可能会出现行人或其他机动车辆等道路使用者,不遵守交通法规横穿马路等紧急情况,也有可能驾驶员疲劳驾驶或有接打电话等违法行为导致注意力分散,或者天气恶劣出现雨、雪、大雾等能见度较差的情况[1]。这些情景经常会导致驾驶员无法及时进行制动行为[2],增加行驶的危险性。在这些情况下,aeb系统的环境感知系统能够代替驾驶员的感知,对所处环境判断更加准确,并在危险情况下主动采取制动措施,避免碰撞事故的发生。
5、aeb系统的组成部分包括执行系统、环境感知系统和控制系统。近几年国外车企均逐渐开始进行自动紧急制动系统相关功能的研究。例如广为人知的大众自主研发的预碰撞安全系统(frontassist)[3]和菲亚特的城市道路制动控制系统(city brake control)[4]采用的传感器配置和功能基本一致,通常使用长距离探测雷达与摄像头搭配使用,分别获取目标车辆信息和路况信息。
6、通过对传感器获得的信息进行处理,判断当前车辆的行驶状态。当经计算得到当前车辆行驶状况可能发生碰撞事故时,系统首先向驾驶员发出警报,例如声音预警或方向盘震动等方式。如果与目标车辆或障碍物的相对距离小于安全距离,但驾驶员仍未采取制动措施时,则系统会采取主动制动的措施。
7、相关参考文献:
8、[1]左培文,张立淼,李育贤.自动紧急制动系统发展现状与未来趋势[j].汽车工业研究,2017(02):25-29.
9、[2]高继东,张慧,高博麟,宋攀,张倩.自主紧急制动系统测试方法[j].汽车工程师,2017(01):11-15.
10、[3]heng,wei,you-lin,et al.a novel dynamic rollover threshold model oftop-heavy vehicle[c]//2018.
11、[4]丁亚强.基于毫米波雷达的车辆纵向防碰撞系统研究[d].江苏大学,2018.
技术实现思路
1、针对现有的aeb系统无法进行实时的动态监测的问题,本发明提出一种基于结构分析法的汽车aeb故障诊断方法,可以无需系统的具体参数,动态快速地进行复杂系统的故障诊断,以此实现aeb系统瞬间或微小故障的诊断与隔离。
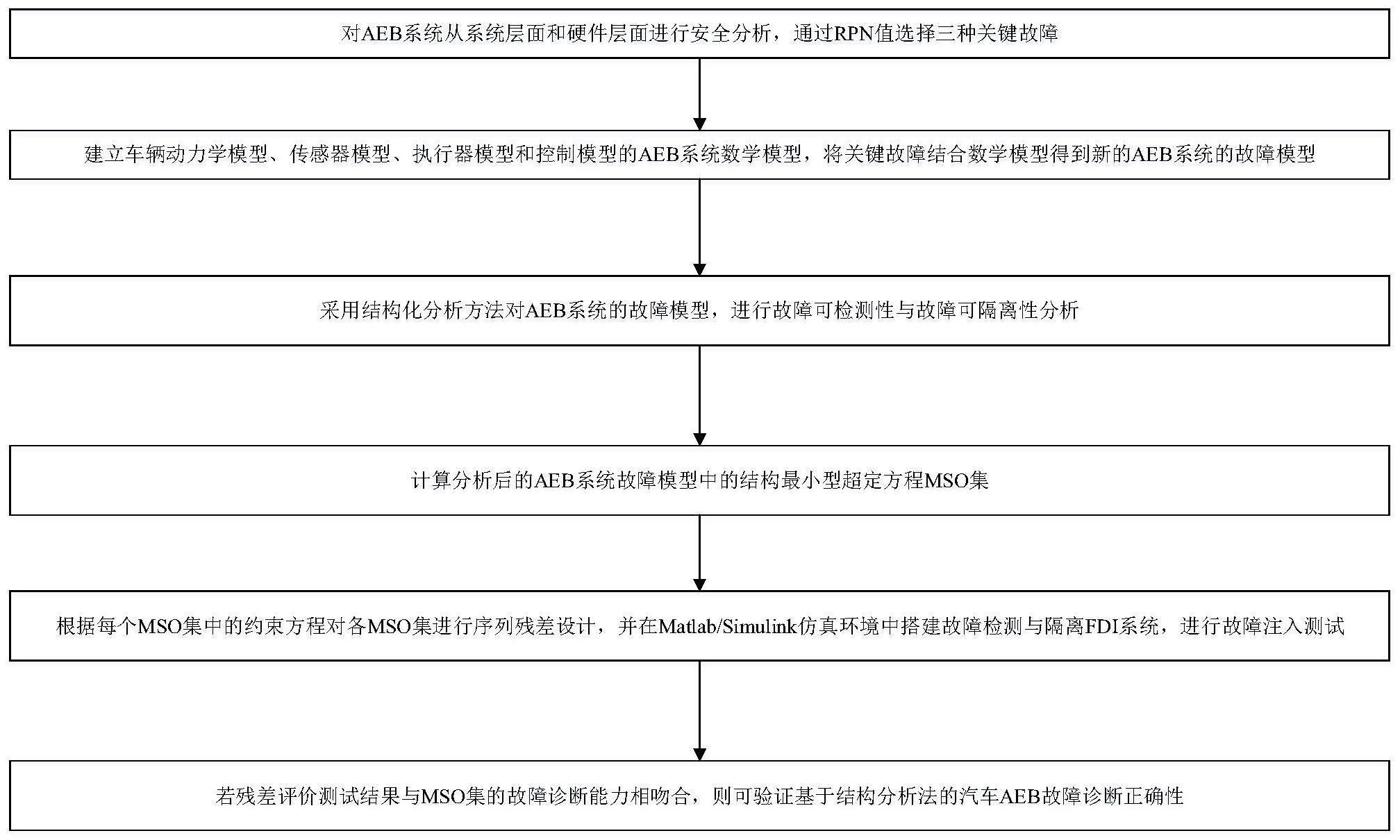
2、所述基于结构分析法的汽车aeb故障诊断方法,具体步骤为:
3、步骤一、对aeb系统从系统层面和硬件层面进行安全分析,通过rpn值选择三种关键故障;三种关键故障及故障类型如下表所示:
4、
5、步骤二:建立车辆动力学模型、传感器模型、执行器模型和控制模型的aeb系统数学模型,将关键故障结合数学模型得到新的aeb系统的故障模型;
6、aeb系统的故障模型公式如下:
7、
8、t表示总力矩;m表示1/4整车质量;g表示重力加速度;μ(s)表示轮胎特性曲线,在不同滑移率下得到的摩擦因数;rr表示车轮半径,kf表示制动系数,制动系数的值取决于制动活塞的横截面积。fb表示车辆的制动力;为制动压力调节器对应的故障变量;
9、i表示车轮的转动惯量;w表示车轮的角速度;fw为轮速传感器对应的故障变量;
10、pb表示制动主缸压力;ep表示制动液弹性模量;q表示制动液进入制动主缸的流量;fq为制动器漏液对应的故障变量;vl表示制动主缸内容积;a表示车辆加速度;v表示车辆速度;
11、dr表示mazda安全相对距离;a1表示本车最大减速度;t1表示驾驶员反应延迟时间;t2表示制动器所需的延迟时间;d0表示最小停止距离;cd表示风阻系数;aρ表示有效迎风面积;f表示故障变量;kb为制动主缸与制动力之比;u(t)表示期望减速度的控制规律;kp表示比例增益系数;ki表示积分增益系数;kd表示微分增益系数;kb表示制动主缸与制动力之比;cd表示流量系数;ac表示过流面积;ps表示油源压力;ρ表示油液密度。
12、步骤三:采用结构化分析方法对aeb系统的故障模型,进行故障可检测性与故障可隔离性分析;
13、首先,依据aeb系统的故障模型建立aeb系统的结构表征图,然后对该结构表征图进行dm分解,得到故障的可检测性与可隔离性;
14、如果故障模型中存在不可检测或不可隔离的故障时,对系统进行传感器配置以增加冗余方程,并反复对系统进行dm分解,对aeb配置传感器后的系统进行故障可检测性与可隔离性分析。
15、步骤四:计算分析后的aeb系统故障模型中的结构最小型超定方程mso集;
16、步骤五:根据每个mso集中的约束方程对各mso集进行序列残差设计,并在matlab/simulink仿真环境中搭建故障检测与隔离fdi系统,进行故障注入测试;
17、步骤六:若残差评价测试结果与mso集的故障诊断能力相吻合,则可验证基于结构分析法的汽车aeb故障诊断正确性。
18、本发明与现有技术相比,具有以下优势和积极效果:
19、(1)本发明一种基于结构分析法的汽车aeb故障诊断方法,采用了结构化分析方法对智能驾驶汽车的aeb系统进行了分析,实现了对故障可隔离性和可检测性的分析;
20、(2)本发明一种基于结构分析法的汽车aeb故障诊断方法,对于原本的aeb结构模型进行了扩充,形成了aeb系统的故障模型;
21、(3)本发明基于结构分析法的汽车aeb故障诊断方法,搭在matlab/simulink建了aeb系统的fdi模型,从而实现了故障注入试验,能够再验证该方法的有效性。
- 还没有人留言评论。精彩留言会获得点赞!