车辆纵横垂耦合域控制系统及方法
本发明涉及车辆控制,尤其涉及一种车辆纵横垂耦合域控制系统及方法。
背景技术:
1、分布式驱动车辆采用全线控集成化底盘,具有线控驱动能力、线控制动能力和线控转向能力,整车可装配复杂的传感与控制系统,是实现智能驾驶的重要试验平台。
2、在对分布式驱动车辆进行车辆动力学控制时,由于分布式驱动车辆的高度非线性动态特性与参数不确定性,使其车辆动力学控制的复杂程度有所提高。现有技术中,通常采用主动转向和各轮胎力矩优化分配的方法来进行车辆动力学控制,以改善车辆操纵的稳定性,然而这种方法仅仅约束了车辆的纵向自由度和横向自由度,难以保证分布式驱动车辆全工况行驶的稳定性与平顺性。
技术实现思路
1、本发明实施例提供了一种车辆纵横垂耦合域控制系统及方法,以解决现有技术中难以保证分布式驱动车辆全工况行驶的稳定性与平顺性的问题。
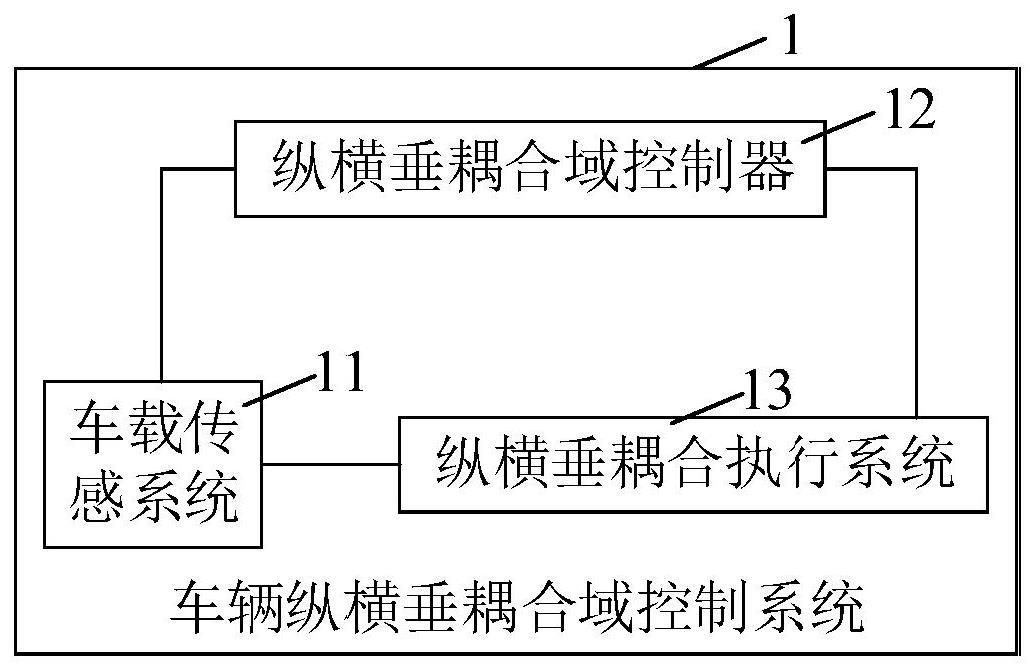
2、第一方面,本发明实施例提供了一种车辆纵横垂耦合域控制系统,包括:车载传感系统、纵横垂耦合域控制器以及纵横垂耦合执行系统;
3、所述车载传感系统,第一端连接所述纵横垂耦合域控制器的第一端,第二端连接所述纵横垂耦合执行系统的第一端,用于采集车辆状态信息和环境信息,并将所述车辆状态信息和所述环境信息发送给所述纵横垂耦合域控制器;
4、所述纵横垂耦合域控制器,第二端连接所述纵横垂耦合执行系统的第二端,用于接收所述车辆状态信息和所述环境信息,基于所述车辆状态信息和所述环境信息生成控制报文,并将所述控制报文发送给所述纵横垂耦合执行系统;
5、所述纵横垂耦合执行系统用于接收所述控制报文,并根据所述控制报文对车辆纵向、横向以及垂向进行控制。
6、在一种可能的实现方式中,所述纵横垂耦合域控制器包括:车-电-路耦合模型模块、驾驶意图识别模块以及多模式协调切换控制模块;
7、所述车-电-路耦合模型模块,第一端连接所述车载传感系统的第一端,第二端连接所述驾驶意图识别模块的第一端,第三端连接所述多模式协调切换控制模块的第一端,用于接收所述车辆状态信息和所述环境信息,基于纵横垂耦合动力学模型、所述车辆状态信息和所述环境信息计算车辆纵向、横向以及垂向的第一动力响应,以及基于路面响应特性模型、所述车辆状态信息和所述环境信息计算当车辆行驶过路面时路面对车辆的第二动力响应,以及基于电机运动及响应特性模型、所述车辆状态信息和所述环境信息计算电机转动和电磁激励对车辆的第三动力响应,以及根据所述第一动力学响应、所述第二动力学响应和所述第三动力学响应确定车辆当前状态,并将所述车辆当前状态发送给所述驾驶意图识别模块和所述多模式协调切换控制模块;
8、所述驾驶意图识别模块,第二端连接所述多模式协调切换控制模块的第一端,用于接收所述车辆当前状态,根据所述车辆当前状态和驾驶员操作反馈信息确定车辆目标状态,并将所述车辆目标状态发送给所述多模式协调切换控制模块;
9、所述多模式协调切换控制模块,第二端连接所述纵横垂耦合执行系统的第二端,用于接收所述车辆当前状态和所述车辆目标状态,根据所述车辆状态信息、所述环境信息、所述车辆当前状态和所述车辆目标状态仲裁工况复杂度,并基于所述工况复杂度确定车辆驾驶模式的切换控制指令。
10、在一种可能的实现方式中,所述纵横垂耦合域控制器还包括:参数计算模块;
11、所述车-电-路耦合模型模块的第一端通过所述参数计算模块的第一端、所述参数计算模块的第二端连接所述车载传感系统的第一端;
12、所述参数计算模块的第三端连接所述多模式协调切换控制模块的第一端,用于对所述车辆状态信息和所述环境信息进行数据滤波和数据融合的预处理,基于预处理后的车辆状态信息和环境信息计算车身位姿、道路形貌和路面参数,并将所述车身位姿、所述道路形貌和所述路面参数发送给所述车-电-路耦合模型模块和所述多模式协调切换控制模块。
13、在一种可能的实现方式中,所述参数计算模块包括:环境感知模块和参数估计模块;
14、所述环境感知模块,第一端连接所述车载传感系统的第一端,第二端连接所述参数估计模块的第一端,第三端连接所述多模式协调切换控制模块的第一端,用于对所述车辆状态信息和所述环境信息进行数据滤波和数据融合的预处理,得到目标车辆状态信息和目标环境信息,并将所述目标车辆状态信息和所述目标环境信息发送给所述参数估计模块和所述多模式协调切换控制模块;
15、所述参数估计模块,第二端连接所述车-电-路耦合模型模块的第一端,第三端连接所述多模式协调切换控制模块的第一端,用于接收所述目标车辆状态信息和所述目标环境信息,基于所述目标车辆状态信息计算车身位姿,基于所述目标环境信息估计道路形貌和路面参数,并将所述车身位姿、所述道路形貌和所述路面参数发送给所述车-电-路耦合模型模块和所述多模式协调切换控制模块。
16、在一种可能的实现方式中,所述纵横垂耦合域控制器还包括:安全诊断与容错模块;
17、所述安全诊断与容错模块,第一端分别连接所述车-电-路耦合模型模块的第三端、所述驾驶意图识别模块的第二端以及所述参数计算模块的第三端,第二端连接所述多模式协调切换控制模块的第三端,用于接收所述车辆当前状态和所述车辆目标状态,根据所述车辆当前状态和所述车辆目标状态确定车辆行驶安全程度,根据所述车载传感系统、所述纵横垂耦合域控制器与所述纵横垂耦合执行系统三者之间的通讯状态诊断所述车辆纵横垂耦合域控制系统的运行状态,以及根据所述车辆行驶安全程度和所述运行状态对所述纵横垂耦合执行系统中的失效构件进行容错补偿,并将容错补偿结果发送给所述多模式协调切换控制模块;
18、所述多模式协调切换控制模块,用于根据所述容错补偿结果、所述目标车辆状态信息、所述目标环境信息、所述车辆当前状态以及所述车辆目标状态仲裁所述工况复杂度,基于所述工况复杂度确定车辆驾驶模式的切换控制指令,并根据所述容错补偿结果和所述切换控制指令生成所述控制报文,并将所述控制报文发送给所述纵横垂耦合执行系统。
19、在一种可能的实现方式中,所述纵横垂耦合执行系统包括:纵向单元、横向单元以及垂向单元;
20、所述纵向单元的第一端、所述横向单元的第一端以及所述垂向单元的第一端均连接所述车载传感系统的第二端;
21、所述纵向单元的第二端、所述横向单元的第二端以及所述垂向单元的第二端均连接所述纵横垂耦合域控制器的第二端;
22、所述纵向单元用于基于所述控制报文控制车辆的驱动电机转速、电机负反馈电流以及轮胎滑移率;
23、所述横向单元用于基于所述控制报文控制车辆的转向电机角度和转向电机转速;
24、所述垂向单元用于基于所述控制报文控制车辆的悬架阻尼、悬架刚度以及悬架动挠度。
25、在一种可能的实现方式中,所述车辆状态信息包括第一车辆状态信息和第二车辆状态信息;其中,所述第一车辆状态信息用于表征在所述纵横垂耦合执行系统根据所述控制报文对车辆纵向、横向以及垂向进行控制之后,车辆纵向、横向以及垂向的信息,所述第二车辆状态信息用于表征车辆位姿信息;
26、所述车载传感系统包括:执行机构监测系统;
27、所述执行机构监测系统的第一端连接所述纵横垂耦合域控制器的第一端,第二端连接所述纵横垂耦合执行系统的第一端,用于采集所述第一车辆状态信息,并将所述第一车辆状态信息发送给所述纵横垂耦合域控制器。
28、在一种可能的实现方式中,所述车载传感系统还包括:摄像头、雷达、gps单元以及imu单元;
29、所述摄像头的第一端、所述雷达的第一端、所述gps单元的第一端以及所述imu单元的第一端均连接所述纵横垂耦合域控制器的第一端;
30、所述摄像头、所述雷达、所述gps单元以及所述imu单元用于采集所述第二车辆状态信息和所述环境信息,并将所述第二车辆状态信息和所述环境信息发送给所述纵横垂耦合域控制器。
31、第二方面,本发明实施例提供了一种车辆,包括如上第一方面或第一方面的任一种可能的实现方式所述的车辆纵横垂耦合域控制系统。
32、第三方面,本发明实施例提供了一种车辆纵横垂耦合域控制方法,基于如上第一方面或第一方面的任一种可能的实现方式所述的车辆纵横垂耦合域控制系统,所述车辆纵横垂耦合域控制方法包括:
33、获取车辆状态信息和环境信息;
34、根据所述车辆状态信息和所述环境信息生成控制报文,以使纵横垂耦合执行系统根据所述控制报文对车辆纵向、横向以及垂向进行控制。
35、本发明实施例提供一种车辆纵横垂耦合域控制系统及方法,该控制系统包括车载传感系统、纵横垂耦合域控制器以及纵横垂耦合执行系统三大部分。通过将车载传感系统采集的车辆状态信息和环境信息发送至纵横垂耦合域控制器,进而纵横垂耦合域控制器基于车辆状态信息和环境信息生成控制报文,并发送至纵横垂耦合执行系统,然后纵横垂耦合执行系统根据控制报文对车辆纵向、横向以及垂向进行相应控制。如此一来,兼顾了车辆纵向、横向以及垂向自由度的优化协调控制,改善了车辆控制的精确性与安全性,从而通过多自由度的精确控制有效地保证了分布式驱动车辆全工况下行驶的稳定性与平顺性。
- 还没有人留言评论。精彩留言会获得点赞!