多无人机飞行路径的确定方法、装置、设备及存储介质与流程
本技术涉及无人机领域,尤其涉及一种多无人机飞行路径的确定方法、装置、设备及存储介质。
背景技术:
1、无人机的飞行路径是指无人机根据飞行任务,在满足无人机性能、路径安全性、可飞行性等多种约束条件的前提下,从初始位置飞到目标位置的路径。
2、现有技术中,在确定无人机的飞行路径时,通常是采用单个种群的粒子群优化算法,通过进行迭代运算确定最优解,根据最优解确定出单架无人机的最优飞行路径。
3、但是现有技术通常更适用于确定单架无人机的飞行路径,因此,亟需一种可以同时确定多架无人机飞行路径的方法。
技术实现思路
1、本技术提供一种多无人机飞行路径的确定方法、装置、设备及存储介质,用以解决现有技术通常更适用于确定单架无人机的飞行路径,并不适用于同时确定多架无人机飞行路径的技术问题。
2、第一方面,本技术提供一种多无人机飞行路径的确定方法,包括:
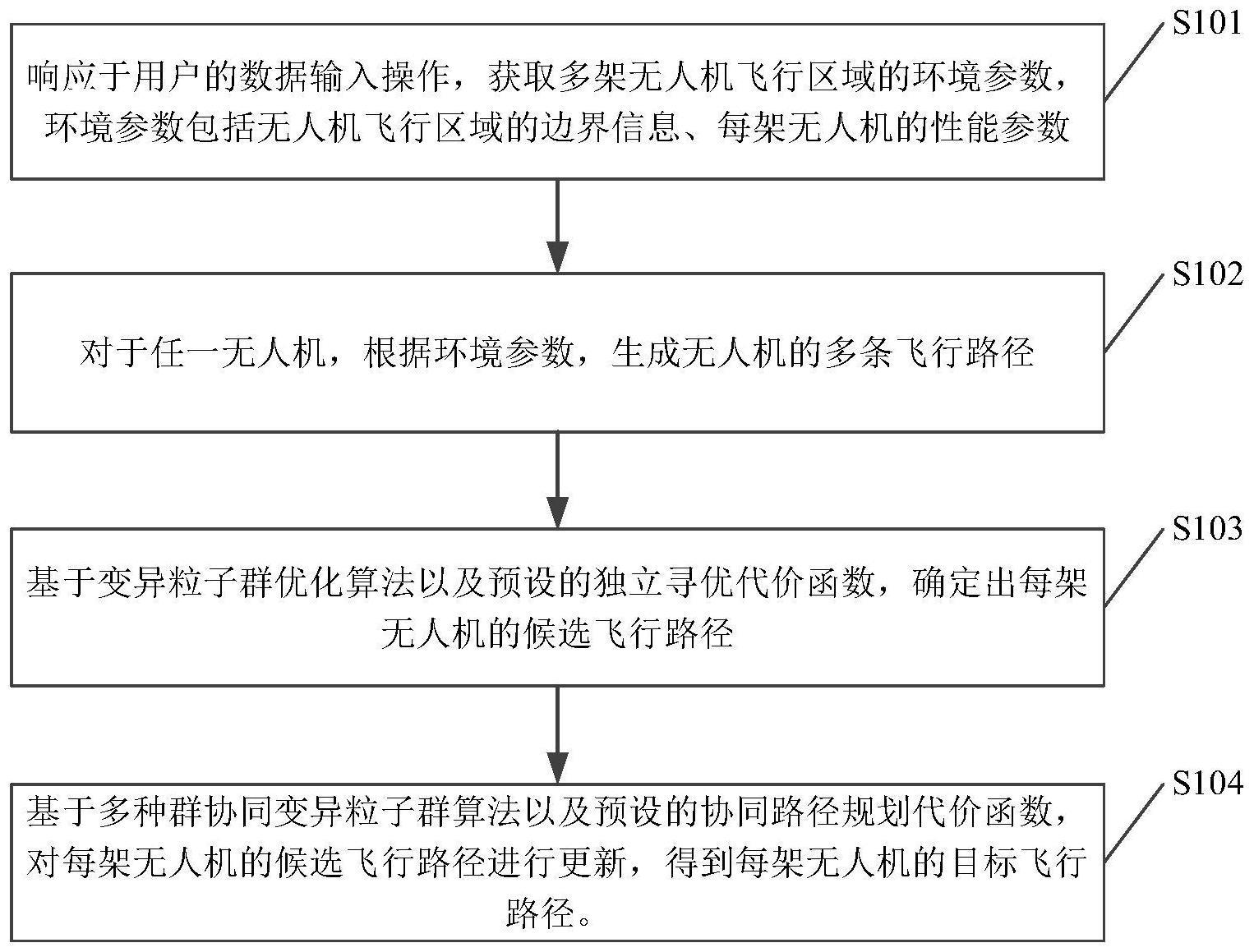
3、响应于用户的数据输入操作,获取多架无人机飞行区域的环境参数,所述环境参数包括无人机飞行区域的边界信息、每架无人机的性能参数;
4、对于任一无人机,根据所述环境参数,生成所述无人机的多条飞行路径;
5、基于变异粒子群优化算法以及预设的独立寻优代价函数,确定出每架无人机的候选飞行路径;
6、基于多种群协同变异粒子群算法以及预设的协同路径规划代价函数,对每架无人机的候选飞行路径进行更新,得到每架无人机的目标飞行路径。
7、可选地,如上所述的方法,所述对于任一无人机,根据所述环境参数,生成所述无人机的多条飞行路径,包括:
8、对于任一无人机,根据所述环境参数,随机生成多条飞行路径,每条飞行路径上包括多个路径点;
9、根据预设的三次样条插值算法,对每条飞行路径上的路径点数量进行扩充,生成扩充后所述无人机的多条飞行路径。
10、可选地,如上所述的方法,所述基于变异粒子群优化算法以及预设的独立寻优代价函数,确定出每架无人机的候选飞行路径,包括:
11、对于任一无人机,将所述无人机的多条飞行路径映射为输入的一个粒子群;
12、初始化所述粒子群中每个粒子的初始位置数据和初始速度数据;
13、根据预设的独立寻优代价函数及每个粒子的初始位置数据和初始速度数据,确定每个粒子的个体最优代价函数值和所述粒子群的全局最优代价函数值;
14、基于预设的迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述粒子群的全局最优代价函数值;
15、当迭代次数满足第一预设迭代终止条件时,得到的更新后的全局最优代价函数值则为所述无人机的候选飞行路径。
16、可选地,如上所述的方法,所述根据预设的独立寻优代价函数及每个粒子的初始位置数据和初始速度数据,确定每个粒子的个体最优代价函数值和所述粒子群的全局最优代价函数值,包括:
17、对于任一粒子,根据所述粒子的初始位置数据、初始速度数据以及所述预设的独立寻优代价函数,计算所述粒子的独立寻优代价函数值;
18、若所述粒子的独立寻优代价函数值小于或等于预设的粒子个体最优代价函数阈值,则将所述粒子的独立寻优代价函数值确定为所述粒子的个体最优代价函数值;
19、根据每个粒子的个体最优代价函数值,将小于或等于预设的全局最优代价函数阈值的个体最优代价函数值,确定为所述粒子群的全局最优代价函数值。
20、可选地,如上所述的方法,所述基于预设的迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述粒子群的全局最优代价函数值之后,还包括:
21、若第一预设连续迭代次数内,得到的所述粒子群的全局最优代价函数值相同,则对所述全局最优代价函数值进行替换操作,得到替换后的全局最优代价函数值;
22、继续执行所述基于预设的迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述粒子群的全局最优代价函数值的步骤。
23、可选地,如上所述的方法,所述基于多种群协同变异粒子群算法以及预设的协同路径规划代价函数,对每架无人机的候选飞行路径进行更新,得到每架无人机的目标飞行路径,包括:
24、将每个粒子群的全局最优代价函数值对应的粒子进行集合,得到集合后的总粒子群;
25、根据预设的协同路径规划代价函数及根据所述总粒子群中每个粒子的位置数据和速度数据,确定每个粒子的协同路径规划代价函数值;
26、根据每个粒子的协同路径规划代价函数值,确定出每个粒子的个体最优代价函数值和所述总粒子群中每个粒子群的全局最优代价函数值;
27、基于预设的所述迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述总粒子群中每个粒子群的全局最优代价函数值;
28、当迭代次数满足第二预设迭代终止条件时,得到的更新后的每个粒子群的全局最优代价函数值则为每架无人机的目标飞行路径。
29、可选地,如上所述的方法,所述基于预设的所述迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述总粒子群中每个粒子群的全局最优代价函数值之后,还包括:
30、对于任一粒子群,若第二预设连续迭代次数内得到的所述粒子群的全局最优代价函数值相同,则对所述全局最优代价函数值进行替换操作,得到替换后的全局最优代价函数值;
31、继续执行所述基于预设的所述迭代算法,对每个粒子的位置数据和速度数据进行更新,并更新每个粒子的个体最优代价函数值和所述总粒子群中每个粒子群的全局最优代价函数值的步骤。
32、第二方面,本技术提供一种多无人机飞行路径的确定装置,包括:
33、获取模块,用于响应于用户的数据输入操作,获取多架无人机飞行区域的环境参数,所述环境参数包括无人机飞行区域的边界信息、每架无人机的性能参数;
34、生成模块,用于对于任一无人机,根据所述环境参数,生成所述无人机的多条飞行路径;
35、确定模块,用于基于变异粒子群优化算法以及预设的独立寻优代价函数,确定出每架无人机的候选飞行路径;
36、处理模块,用于基于多种群协同变异粒子群算法以及预设的协同路径规划代价函数,对每架无人机的候选飞行路径进行更新,得到每架无人机的目标飞行路径。
37、第三方面,本技术提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
38、所述存储器存储计算机执行指令;
39、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面任一项所述的多无人机飞行路径的确定方法。
40、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现第一方面任一项所述的多无人机飞行路径的确定方法。
41、本技术提供的一种多无人机飞行路径的确定方法、装置、设备及存储介质,通过响应于用户的数据输入操作,获取多架无人机飞行区域的环境参数,其中,环境参数包括无人机飞行区域的边界信息、每架无人机的性能参数。对于任一无人机,根据环境参数,生成该无人机的多条飞行路径,并基于变异粒子群优化算法以及预设的独立寻优代价函数,确定出每架无人机的候选飞行路径。进而基于多种群协同变异粒子群算法以及预设的协同路径规划代价函数,对每架无人机的候选飞行路径进行更新,得到每架无人机的目标飞行路径。本技术的方法,可以同时确定出多架无人机的飞行路径,适用于多架无人机的飞行场景。
- 还没有人留言评论。精彩留言会获得点赞!