一种用于多电机驱动的芯片控制系统
本发明涉及电机控制领域,更具体地说,涉及一种多电机驱动控制算法设计。
背景技术:
1、近年来,随着工业的发展,在如多轴机器人、自动化机床、军用导弹舵机、相控阵列天线等多个相关领域,都需要在有限空间下实现多轴伺服电机的高精度位置、速度控制。目前,常规的电机控制方案大多采用微控制器(mcu)来实现,且大部分mcu只能同时控制1~2台交流伺服电机。普通48mhz主频的32位mcu执行一次伺服同步电机矢量控制和转子位置估计时间可能超过30us。若要实现大于2台电机高精度控制,由于mcu资源不够,处理器计算能力不足,往往需要多块mcu并联,导致系统成本高,且多电机同步、高精度控制受到限制。
2、专利申请号为cn202122072489.1提出一种电机运行控制专用asic芯片系统和电机运行系统,该申请提供的电机运行控制专用asic芯片系统利用asic芯片对电机的控制参数信息,结合专业的pid闭环调节、占空比转换和三相逆变电路对电机的运行电流直接进行调控,相比于传统技术中利用mcu直接控制电机运行的方法更加专业和可靠。亦可适用于多个电机控制,只需增加相应的模块及电路即可。
3、然而通过增加模块及电路数量,虽然可以实现多轴电机控制,但同样会延长该系统的运算处理时间,增大运行功耗并会占用较大面积,无法实现集成度高、运行效率快、功耗低的要求。
技术实现思路
1、本发明目的是提供一种用于多电机驱动的芯片控制系统,在能够实现多轴电机控制的基础上,还能缩小芯片面积,提高集成度和运行效率。
2、本发明通过以下技术方案得以实现:
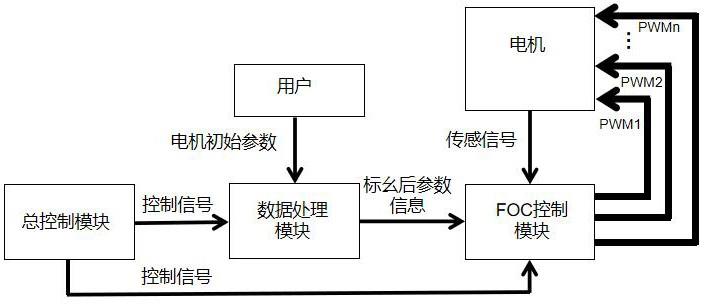
3、一种用于多电机驱动的芯片控制系统,其特征在于,包含总控制模块、数据处理模块和foc控制模块;
4、所述foc(field-oriented control)控制模块是一种用于交流电机控制的技术。它也被称为矢量控制或磁场定向控制。所述foc控制模块的主要目标是实现对交流电机的精确控制,使其能够以高效率和高性能运行。所述总控制模块发出控制信号给所述数据处理模块以及所述foc控制模块的输入端,所述总控制模块内部含有周期计数器,用于对所述foc控制模块及所述数据处理模块进行时序控制;
5、所述数据处理模块接收由用户设定的电机的初始参数信息以及由所述总控制模块发出的所述控制信号,并对所述初始参数信息进行标幺化处理,输出标幺后参数信息给所述foc控制模块;
6、所述foc控制模块的输入端与所述总控制模块和所述数据处理模块的输出端连接,将由所述数据处理模块发送的所述标幺后参数信息,通过矢量pwm调制,生成多段pwm信号输出,来控制多个电机的角速度和转矩。
7、所述总控制模块输入为外部给定启动和停止信号,以控制电机的启动和停止。总控制模块接收到外部启动信号后,向所述数据处理模块以及所述foc控制模块发出控制信号。控制信号包含使能信号、复位信号和时钟信号。所述总控制模块中含有周期计数器,时钟信号以上升沿触发递增,在同一时刻点或不同时刻点对所述数据处理模块以及所述foc控制模块进行时序控制。
8、所述数据处理模块的接收端接收所述总控制模块发出的控制信号以及由用户设定的电机初始参数信息,所述电机初始参数信息包括额定电压、额定电流、额定角速度等信息。所述数据处理模块对所述电机初始参数信息进行标幺化处理。标幺化处理是现有技术中数据处理的一种方式,在标幺化处理中,所述电机初始参数信息被除以一个基准值,从而将其转化为所述标幺后参数信息输出给所述foc控制模块。基准值可以由用户按实际情况指定,也可以公式计算得到。所述标幺后参数信息包括d轴电流值ld1、q轴电流值lq1和角速度值ω。标幺化处理可以消除参数信息中量纲和单位的影响,使得不同参数信息之间可以进行直接比较,以达到良好的电机控制。
9、所述foc控制模块的输入端接收所述总控制模块发出的控制信号,以及所述数据处理模块发送的标幺后参数信息。同时,所述foc控制模块内部含有adc采样模块,用于采集电机运转时实际的电流信号。所述foc控制模块通过矢量脉宽调制(pwm),生成多段经过调制后的pwm信号对电机角速度、转矩进行控制。所述pwm信号是一种调节信号的技术,通过改变信号的脉冲宽度来控制输出信号的平均功率。
10、所述总控制模块、所述数据处理模块和所述foc控制模块均集成在asic芯片上。asic芯片是指专用集成电路(application-specific integrated circuit)芯片,与通用处理器如mcu相比,asic芯片可以提供更高的集成度和更高的性能。该种用于多电机驱动的芯片控制系统通过时序控制,从而实现多电机之间并行运行。与通过增加相应的模块和电路的方法进行多电机控制相比,该种控制系统占用面积更小,所需的硬件资源更低,控制算法更简单,运行效率更高。
11、作为本发明的优选,所述foc控制模块包含d轴电流环pi控制器、q轴电流环pi控制器、速度环pi控制器以及与所述速度环pi控制器的输出端连接的单刀双掷开关;
12、所述d轴电流环pi控制器接收经所述数据处理模块发出的d轴电流值ld1,输出d轴电压控制信号;
13、所述单刀双掷开关处在第一闭合点时,所述q轴电流环pi控制器接收经所述数据处理模块发出的q轴电流值lq1,输出q轴电压控制信号;
14、所述单刀双掷开关处在第二闭合点时,所述数据处理模块发出的角速度值ω,经所述速度环pi控制器转换后输出q轴电流值lq1,由所述q轴电流环pi控制器的输入端接收。
15、所述数据处理模块发出的所述标幺后参数信息包括d轴电流值ld1、q轴电流值lq1和角速度值ω。在电机控制中,d轴和q轴是用于描述电机转子磁场与定子磁场之间相对位置的坐标轴。
16、所述d轴电流环pi控制器用于接收d轴电流值ld1及电机d轴实际电流反馈信号,输出d轴控制电压信号以控制电机的转矩;所述电机d轴实际电流反馈信号是由所述foc控制模块中的adc采集模块采集后,再经坐标变换模块换算得到的。本领域技术人员依靠本实施例的文字解释可以实现,在本文不做具体赘述。
17、所述q轴电流环pi控制器的输入端与所述单刀双掷开关连接,用于接收q轴电流值lq1及电机q轴实际电流反馈信号,输出q轴控制电压信号以控制电机的角速度。所述电机q轴实际电流反馈信号同样,是由foc控制模块中的adc采集模块采集后,再经坐标变换模块换算得到的。本领域技术人员依靠本实施例的文字解释可以实现,在本文不做具体赘述。
18、所述d轴电流值ld1由用户设定后经所述数据处理模块输出。所述q轴电流值lq1有两路输出可供选择:当所述单刀双掷开关处在第一闭合点时,所述q轴电流值lq1由所述数据处理模块直接输出;当所述单刀双掷开关处在第二闭合点时,所述数据处理模块输出所述角速度值ω,经所述速度环pi控制器后输出q轴电流值lq1给到所述q轴电流环pi控制器的输入端。
19、通过所述单刀双掷开关闭合点的切换,用户可配置相应的额定角速度亦或是额定q轴电流实现对电机的角速度闭环控制,增加了配置的多样性和灵活性。且通过开关切换选择其中一路运算,加快了运行时间,提高运行效率。
20、作为本发明的优选,所述速度环pi控制器的输入端连接有用于控制角速度变化的速度给定模块。
21、所述速度给定模块即speed ramp模块,其输入为经所述数据处理模块发出标幺化后额定电流和标幺化后额定角速度指令。用户可对所述speed ramp设置电机角速度增加斜率和时间。所述speed ramp输出电机角速度以及电流的变化曲线发送给所述速度环pi控制器。通过所述speed ramp可以控制电机角速度变化的快慢,实现更精确和平稳的电机运行控制。所诉speed ramp模块为现有技术中成熟的运算模块,本文中不对其进行具体赘述。
22、作为本发明的优选,所述速度环pi公式如下:
23、
24、其中,iq为所述速度环pi控制器输出的所述q轴电流值lq1,espeed(k)为角速度第k拍误差值,espeed(i)为角速度积分误差,kp_speed,ki_speed为调节参数,kp_speed,ki_speed的计算公式如下:
25、
26、其中,fsb为角速度环带宽,tspeedloop为角速度环积分时间,
27、中间变量ki和角速度环相速表达式如下:
28、
29、
30、其中,j表示电机转动惯量,pm表示角速度环相位裕度,p表示电机极对数,ψf为电机磁链。
31、作为本发明的优选,所述d轴电流环pi控制器、所述q轴电流环pi控制器的公式如下:
32、
33、
34、其中,ud、uq分别为d轴电压控制信号、q轴电压控制信号,eid(k)、eiq(k)为d、q轴电流第k拍误差值,eid(i)、eiq(i)为d、q轴电流积分误差,kp_id,ki_id,kp_iq,ki_iq为调节参数,公式如下所示:
35、
36、
37、其中,vbase表示母线基准电压,ibase表示电机基准电流,fcb表示电流环带宽,tpwm表示pwm周期时间,ld、lq分别为电机d、q轴电感,rs为电机定子电阻。
38、作为本发明的优选,所述foc控制模块包含坐标变换模块,所述坐标变换模块包含clarke变换模块、park变换模块、ipark变换模块;所述总控制模块对所述坐标变换模块进行分时使能。
39、所述clarke变换模块将电机的电压、电流值变换为α、β轴电流电压信号输出,再经过所述park变换模块变换,输出为所述q轴实际电流反馈信号、所述d轴实际电流反馈信号分别反馈到所述q轴电流环pi控制器、d轴电流环pi控制器的输入端;所述d轴电流环pi控制器、q轴电流环pi控制器分别输出d轴控制电压信号、q轴控制电压信号,并经inv_park变换模块变换成α、β轴电压信号输出,以控制电机的角速度和转矩。
40、所述坐标变换模块中的所述clarke变换模块、所述park变换模块、所述ipark变换模块,均会利用到乘法器。乘法器数量过多会对系统的面积、功耗、延迟和复杂性产生负面影响。因此本技术方案将其合并成一个模块,即三个运算模块共用一个乘法器,通过所述总控制模块对三个运算模块分时使能,节省了乘法器资源至原来的三分之一,提高了系统的运行效率。
41、作为本发明的优选,所述foc控制模块包含cordic模块,所述cordic模块将电机真实角度转换为sinθ、cosθ值发送给所述坐标变换模块进行运算。
42、cordic算法它的核心思想是将复杂的数学运算转化为坐标系中的旋转操作。通过不断迭代旋转操作,可以逼近目标函数的值。由于cordic算法的操作符号只涉及移位、加法和减法,这些操作在数字逻辑电路中易于实现。因此,cordic算法被广泛用于数字信号处理器(dsp)和其他嵌入式系统中。
43、作为本发明的优选,所述foc控制模块含有用于将传感信号进行解码的解码模块,所述总控制模块对所述解码模块进行分时使能。
44、常用解码模块信息需要多个io接口进行数据传输。虽然多个解码模块并行提高了系统运行速率,但在io资源的利用上得不偿失。而本技术方案所述解码模块利用所述总控制模块对所述解码模块进行时序控制,使得采样数据可以多口复用、分时片选解码,极大的节省了芯片io资源。同时,为了解决多口复用产生的解码模块串行运行时间长的问题,本技术方案结合串行及并行的方式,即在上一个电机解码完成的同时,对下一个电机的所述解码模块进行配置输出,极大的节省了系统运行时间。
45、作为本发明的优选,所述foc控制模块含有用于估计电机角速度以及电角度的观测器,其推导公式如下:
46、
47、
48、其中k1、k2为观测器的调节参数,k1,k2≥0,为估计d、q轴电流,id、iq为电机d、q轴实际反馈电流,为估计电机角速度初始状态。
49、所述观测器即mras-observer,输入为电机实际α、β轴电流反馈信号,通过估计角度将α、β轴电流信号转换为电机d、q轴电流信号,进行mras-observer运算,并能够收敛。该模块可准确估计电机实际电角度以及角速度等电机位置、速度信息。当电机上没有安装传感器时,可使用mras-observer进行估计电机的实际电角度以及角速度信息。
50、一种用于多电机驱动的芯片控制系统的控制方法,其特征在于,包括如下步骤:
51、s01、初始化步骤:各个模块初始化,寄存器复位清零;
52、s02、采样偏置步骤:采集实际电流电压偏置信息以及电机的初始位置信息,进行计算处理,所述采样偏置步骤可调整循环次数,采集多组数据进行对比;
53、s03、电机运行控制步骤:输出经过调制后的pwm信号给电机,实现对电机的角速度和转矩的精确控制;
54、s04、故障保护步骤:对各路电机进行故障监测,若出现故障则对故障模块进行复位清零。
55、各步骤的具体流程如下:
56、s01、初始化步骤:所述总控制模块接收到外部启动信号后,进入所述初始化步骤,向下级各模块发出控制使能信号,各个模块寄存器复位清零;
57、s02、采样偏置步骤:所述初始化步骤完成后进入采样偏置步骤,所述foc控制模块接收所述总控制模块发出的使能信号,得到实际电流电压偏置信息以及电机初始位置信息,并对偏置信息进行计算处理。该采样偏置步骤可调整循环次数,采集多组数据进行对比,确保采集到的数据正确、完整;
58、s03、电机运行控制步骤:所述偏置采样步骤完成后,进入电机运行控制步骤,所述foc控制模块接收所述总控制模块发出的使能信号,输出经过调制后的pwm信号给电机,实现对电机角速度和转矩的精确控制;
59、s04、故障保护步骤:所述电机运行控制步骤完成后进入故障保护步骤,对各路电机进行故障检测,若无故障,所述总控制模块可以让所述foc控制模块依次发出给定周期信号,并以进行循环控制;若在控制过程中出现故障,则直接进入故障步骤,所述总控制模块对所有下属模块进行复位操作。
60、各个步骤可通过调整相应周期线性序列机计数器调整控制执行频率。同样,周期计数器以系统时钟上升沿触发递增,在同一时刻点可同时使能多台所述foc控制模块信号。此外,若对多台电机进行分时控制,则可在不同时刻点对所述foc控制模块使能,可根据系统时钟以及周期计数器进行计算分时触发所述foc控制模块,总控制模块安排了电机运行模块的启动时刻,可控制电机在相应需求时间启动,因此可将不同电机间的各个模块使能信号进行次序合理安排以及对模块输入给定数值进行用户自定义,以达到多个电机的多样化控制,如多台电机同步不同速控制或独立控制。
61、综上所述,本发明具有如下有益效果:
62、1.三个功能模块均集成在asic芯片上,asic芯片可以提供更高的集成度和更高的性能,加快控制系统的运行效率。
63、2.总控制模块对其它各模块进行时序控制,从而实现多个电机的控制,该种控制系统占用面积更小,所需的硬件资源更低,控制算法更简单,运行效率更高。
64、3.通过单刀双掷开关闭合点的切换,用户可配置相应的额定角速度亦或是额定q轴电流实现对电机的角速度闭环控制,增加了配置的多样性和灵活性。
65、4.将clarke变换模块、park变换模块、ipark变换模块合并成一个模块,即三个运算模块共用一个乘法器,通过所述总控制模块对三个运算模块分时使能,节省了乘法器资源至原来的三分之一,提高了系统的运行效率。
66、5.利用总控制模块对解码模块进行时序控制,使得采样数据可以多口复用、分时片选解码,极大的节省了芯片io资源。
- 还没有人留言评论。精彩留言会获得点赞!