一种无人作业设备的路径规划方法及装置与流程
本发明涉及路径规划,特别是指一种无人作业设备的路径规划方法及装置。
背景技术:
1、目前高空近墙作业设备大多采用自主无人机,其中四旋翼无人机应用最为广泛,四旋翼无人机组成简单,由一个机架与控制器就可以构成。在控制方面也较为简单,只需要控制四个旋翼的电机的转动速度,四个旋翼即可产生不同的推力,通过调节电机的转速就可以实现四旋翼的垂直起降、滚转、俯仰、偏航、悬停等各种姿态运动。同时,四旋翼无人机可以在悬停的状态下瞬间变换姿态、切换运动状态、灵活机动,具有良好的可操作性。
2、在近墙体作业情况下,由于离墙面距离近、墙面阳台和窗户凸等因素干预,无人机的自主避障显得尤为重要。传统的路径规划算法都是通过提前建立环境地图,在无人机作业前通常已经计算出路径,但是面对环境变化或者出现动态障碍物,传统的规划算法往往不能取得较好的效果。
技术实现思路
1、本发明要解决的技术问题是提供一种无人作业设备的路径规划方法及装置,通过用户在已知的环境地图上划定的作业区域来自动生成高效的作业路径,无人机按照规划出的作业路径进行飞行,并且在飞行过程保持自主避障。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种无人作业设备的路径规划方法,所述方法包括:
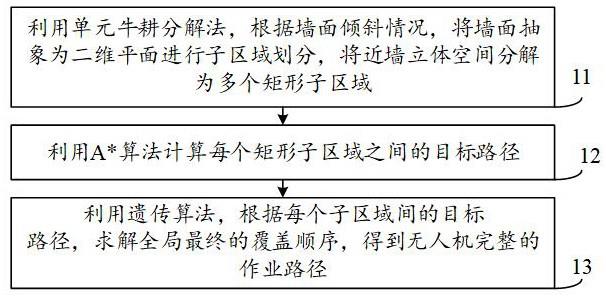
4、利用单元牛耕分解法,根据墙面倾斜情况,将墙面抽象为二维平面进行子区域划分,将近墙立体空间分解为多个矩形子区域;
5、利用a*算法计算每个矩形子区域之间的目标路径;
6、利用遗传算法,根据每个子区域间的目标路径,求解全局最终的覆盖顺序,得到无人机完整的作业路径。
7、进一步的,利用单元牛耕分解法,根据墙面倾斜情况,将墙面抽象为二维平面进行子区域划分,包括:
8、通过单元牛耕分解法将墙面根据障碍物的分布情况进行分割,分割为多个未含障碍物的子区域;
9、根据墙面相对地面水平面的倾斜方向,将墙面分解为垂直墙面、向外倾斜墙面和向内倾斜墙面;
10、将垂直墙面、向外倾斜墙面和向内倾斜墙面,分别抽象为二维垂直平面、二维向外倾斜平面和二维向内倾斜平面;
11、根据二维垂直平面、二维向外倾斜平面和二维向内倾斜平面,分别进行子区域的划分。
12、进一步的,将近墙立体空间分解为多个矩形子区域,包括:
13、根据单元牛耕分解法,将输入事件与输出事件间的所有邻接单元合并成一个单元;
14、根据近墙面存在的正立方体障碍物的布局特点,采用与墙面平行且水平的割线进行分割,以将近墙立体空间划分为多个矩形子区域。
15、进一步的,利用a*算法计算每个矩形子区域之间的目标路径,包括:
16、计算出每个矩形子区域之间的目标飞行路径,以实现无人机对所有矩形子区域的有序覆盖;
17、将每个矩形子区域的几何中心点设为节点;
18、从起点开始,评估周围节点,获得两节点之间的最小代价路径;
19、根据两节点之间的最小代价路径,计算出所有矩形子区域节点之间的最低代价路径。
20、进一步的,在利用遗传算法,根据每个子区域间的目标路径,求解全局最终的覆盖顺序,得到无人机完整的作业路径后,还包括:
21、在得到每个子区域间最低代价路径后,利用遗传算法进行全局优化,求解出覆盖所有子区域的最终完整作业路径;
22、根据遗传算法求解的全局最优路径,无人机执行作业;
23、在作业执行过程中,当遇到障碍物时,通过激光slam检测障碍物,并使用人工势场法规划避障路径,避开障碍后,返回到原规划路径,继续执行作业。
24、进一步的,利用遗传算法进行全局优化,求解出覆盖所有子区域的最终完整作业路径,包括:
25、根据计算出每个节点对之间的最小代价路径,其中,
26、
27、;
28、其中,( x start, y start)为起点坐标;( x n, y n)为当前节点坐标;( x goal, y goal)为目标节点坐标;为邻近节点的最小代价路径;为从起点到当前点n的实际代价;为从当前点n到目标点的估计代价。
29、进一步的,通过单元牛耕分解法将墙面根据障碍物的分布情况进行分割,分割为多个未含障碍物的子区域,包括:
30、设墙面区域为s,障碍物集合为 o={ o 1, o 2,…, o r}, r为障碍物数量;
31、计算障碍物的外接矩形 b i, i=1,2,… ,r;
32、将墙面s减去所有障碍物的外接矩形 b i,得到墙面除障碍物外的可行区域s′,,u为求多个区域的并集;
33、将可行区域s′按照矩形单元尺寸要求,利用垂直和水平割线分割为m个矩形子区域{ s 1, s 2,…, s m},计算公式为:, s j为第j个矩形子区域,共分割为m个矩形子区域;
34、划分后的矩形子区域 s j为不含障碍物的墙面子区域。
35、第二方面,一种无人作业设备的路径规划装置,包括:
36、获取模块,用于利用单元牛耕分解法,根据墙面倾斜情况,将墙面抽象为二维平面进行子区域划分,将近墙立体空间分解为多个矩形子区域;利用a*算法计算每个矩形子区域之间的目标路径;
37、处理模块,用于利用遗传算法,根据每个子区域间的目标路径,求解全局最终的覆盖顺序,得到无人机完整的作业路径。
38、第三方面,一种计算设备,包括:
39、一个或多个处理器;
40、存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述方法。
41、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现上述方法。
42、本发明的上述方案至少包括以下有益效果:
43、本发明的上述方案,通过用户在已知的环境地图上划定的作业区域来自动生成高效的作业路径,无人机按照规划出的作业路径进行飞行,并且在飞行过程保持自主避障。
- 还没有人留言评论。精彩留言会获得点赞!