一种基于微分平坦的倒立摆改进自抗扰控制方法及系统
本发明涉及智能控制方法,尤其涉及一种基于微分平坦的倒立摆改进自抗扰控制方法及系统。
背景技术:
1、欠驱动控制是控制领域研究的热点问题,其系统自由度大于独立控制维数的问题使得控制问题变得复杂。倒立摆具有非线性,强耦合,静不稳定性,控制输入少于控制输出的特点,是一类典型的欠驱动系统,常用作各种欠驱动控制算法的测试对象,其所属的欠驱动系统类型具有很好的移植性和扩展性,因此,对倒立摆系统的控制方法进行研究具有重要的理论意义和应用价值。
2、倒立摆系统由于右半平面零点的存在,使得其具有不稳定零动态和非最小相位特性而难以控制,系统的稳定裕度与反向超调下的快速过渡相互矛盾,难以用常规的反馈线性化和高增益控制的方式提升控制性能(isidori a.the zero dynamics of a nonlinearsystem:from the origin to the latest progresses of a long successful story[j].european journal of control,2013,19(5):369-378.)。针对此问题,微分平坦(differential flatness)技术(rigatos g g.nonlinear control and filtering usingdifferential flatness approaches:applications to electromechanical systems[m].springer,2015.)提供了一种通过变量变换消除欠驱动特性的方法,克服了系统的输入输出不平衡的问题,实现了外部输入下系统状态的完全控制。
3、针对倒立摆的控制问题,各类控制方法相继被提出并应用,如基于线性二次型调节的滑模控制(chawla i,singla a.real-time stabilization control of a rotaryinverted pendulum using lqr-based sliding mode controller[j].arabian journalfor science and engineering,2021,46:2589-2596.),反步控制(ma'arif a,vera m am,mahmoud m s,et al.backstepping sliding mode control for inverted pendulumsystem with disturbance and parameter uncertainty[j].journal of robotics andcontrol(jrc),2022,3(1):86-92.),模糊控制(chiu c h,hung y t,peng y f.design ofa decoupling fuzzy control scheme for omnidirectional inverted pendulum real-world control[j].ieee access,2021,9:26083-26092.)等。在多数研究中,大部分算法往往依赖于精确的系统模型和线性化过程,导致控制系统缺乏鲁棒性,难以处理不确定的干扰,在实际工程中并不适用。
4、自抗扰控制(active disturbance rejection control,adrc)是一种对控制对象模型依赖性较低,鲁棒性较强的现代控制方法,其主要控制手段是使用扩张状态观测器(extended state observer,eso)估计不确定的外部干扰,建模误差等所有未知干扰,并设计控制量对这些干扰进行抑制和补偿(zhao z l,guo b z.anovel extended stateobserver for output tracking of mimo systems with mismatched uncertainty[j].ieee transactions on automatic control,2017,63(1):211-218.),所以adrc的关键在于eso。eso的适用范围不仅仅局限于adrc,在其他控制算法中也得到了广泛的应用(wangj,zhu p,he b,et al.an adaptive neural sliding mode control with eso foruncertain nonlinear systems[j].international journal of control,automationand systems,2021,19:687-697.)。eso的性能直接影响着控制器的性能,因此,研究和改进eso具有重要意义。
5、目前,微分平坦技术已经成为控制欠驱动系统的重要方法之一。其基本思想找到适当的状态变量变换和输入变换,将非线性控制问题转化为线性控制问题,并用线性控制的理论和方法进行设计和分析。如文(xia y,pu f,li s,et al.lateral path trackingcontrol of autonomous land vehicle based on adrc and differential flatness[j].ieee transactions on industrial electronics,2016,63(5):3091-3099.)利用微分平坦理论,对自主陆地横向车辆模型进行平坦化分析,得到系统的平坦输出,解决了横向车辆的非线性和欠驱动问题,并结合线性自抗扰控制(linear active disturbancerejection control,ladrc)来处理内部不确定性和外部扰动,但ladrc的观测器采用的参数相对固定,且极点配置所需的计算量与系统阶次成正比。而自抗扰控制技术的关键在于扩张状态观测器,因此,对控制方法的改进往往从观测器入手,通过改进观测器估计扰动的效率来提高系统的控制精度。文(陈晓寒,牛小兵.基于改进扩张状态观测器的船舶动力定位系统控制[j].上海海事大学学报,2020,41(04):25-29+102.)针对传统neso中fal函数的特性,设计了一种faln函数,通过直接设置幅值的方式,限制了在大误差时函数的增益,并将其应用到船舶动力定位系统自抗扰控制中,提升了系统的鲁棒性,但在小误差时仍采用与fal函数相同的结构作为非线性项,收敛速度依然受到限制。针对neso中参数复杂繁多的问题,为减少相位滞后的影响,文(li m,zhao j,hu y,et al.active disturbancerejection position servo control of pmslm based on reduced-order extendedstate observer[j].chinese journal of electrical engineering,2020,6(2):30-41.)采用极点配置方法构造了降阶eso,减少了计算复杂度和参数数量,提高了系统控制精度,但通过降阶的方式可能会引入估计误差,导致控制性能下降,且降阶eso较依赖于准确的系统模型,如果系统参数发生变化,可能需要重新设计和调试控制系统。文(pu z,yuan r,yij,et al.aclass of adaptive extended state observers for nonlinear disturbedsystems[j].ieee transactions on industrial electronics,2015,62(9):5858-5869.)提出了一类新的自适应扩张状态观测器,具有比neso更好的线性形式用于理论分析,观测器可以根据系统的变化和不确定性自动调整参数,以适应不同的工况和扰动条件,提高了系统的鲁棒性,但因增加了额外的自适应机制,也加大了计算复杂度和实时性的要求。
技术实现思路
1、本发明提供了一种基于微分平坦的倒立摆改进自抗扰控制方法及系统,解决现有技术中传统扩张状态观测器中参数复杂,且非线性函数是非有限时间收敛的问题。
2、为解决上述发明目的,本发明提供的技术方案如下:一种基于微分平坦的倒立摆改进自抗扰控制方法,其特征在于,步骤包括:
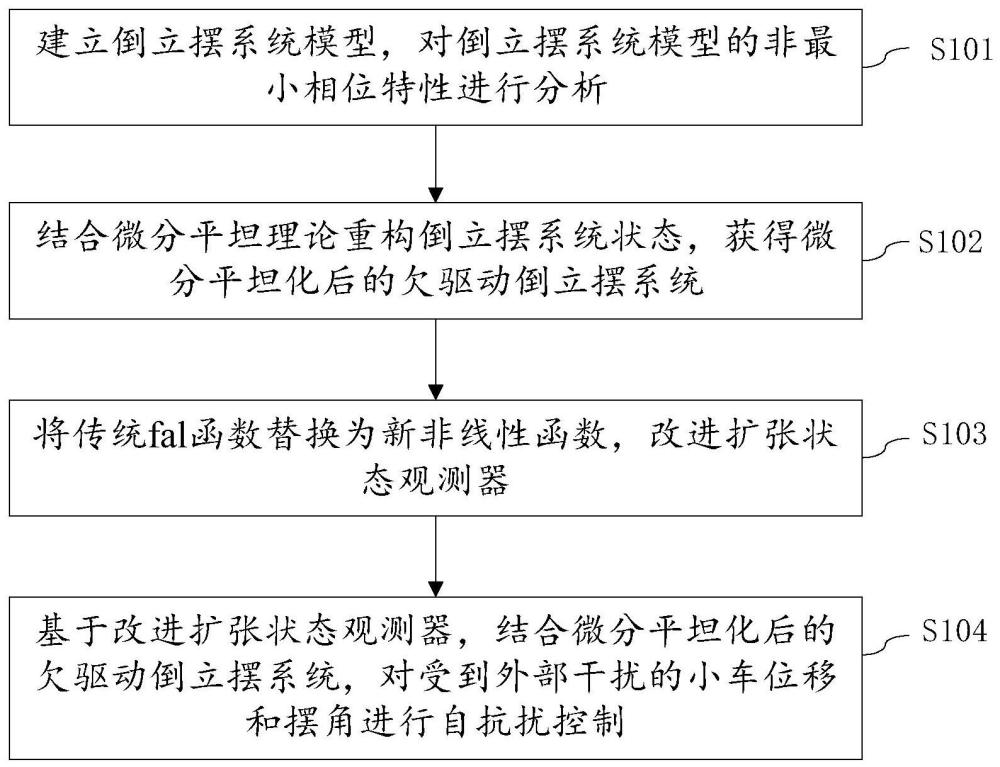
3、s1、建立倒立摆系统模型,对倒立摆系统模型的非最小相位特性进行分析;
4、s2、结合微分平坦理论重构倒立摆系统状态,获得微分平坦化后的欠驱动倒立摆系统;
5、s3、将传统fal函数替换为新非线性函数,改进扩张状态观测器;
6、s4、基于改进扩张状态观测器,结合微分平坦化后的欠驱动倒立摆系统,对受到外部干扰的小车位移和摆角进行自抗扰控制。
7、优选地,步骤s1中,建立倒立摆系统模型,包括:
8、将单级倒立摆系统抽象为小车和均质细杆组成的系统;
9、基于倒立摆系统,当小车带动均质细杆移动时,忽略空气阻力和各种摩擦力,通过牛顿运动定律分析得到如下述公式(1)的系统非线性模型:
10、
11、其中,m为小车质量,m为摆杆质量,l为摆杆长度,ρ为小车距离初始零位置的距离,θ为摆杆与垂直地面的直线之间的角度,i为摆围绕质心的转动惯量,g为重力加速度。
12、优选地,步骤s1中,对倒立摆系统模型的非最小相位特性进行分析,包括:
13、基于系统非线性模型对系统在平衡点附近进行线性化分析,在系统稳定时,小车位移不变,摆杆保持竖直不变,所以θ=0,根据式(1),得到如公式(2)的线性化后的倒立摆模型:
14、
15、设系统状态变量将式(2)转化为下述公式(3)状态空间形式的倒立摆模型:
16、
17、根据传递函数对模型进行最小相位特性分析,状态方程可转化为以小车位移ρ和摆杆角位移θ为输出量的系统传递函数gρ(s)和gθ(s),分析得到小车位移系统是一个具有右半平面零点的非最小相位系统,且摆杆角位移相对输入的增益为负,增加了系统的不稳定性。
18、优选地,步骤s2中,结合微分平坦理论重构倒立摆系统状态,获得微分平坦化后的欠驱动倒立摆系统,包括:
19、基于状态空间形式的倒立摆模型,计算倒立摆系统平坦输出如下述公式(4)所示:
20、
21、其中,
22、将系统的状态变量通过平坦输出及平坦输出的导数表示:
23、
24、将系统的控制输入通过平坦输出及平坦输出的导数表示:
25、
26、优选地,步骤s3中,将传统fal函数替换为新非线性函数,改进扩张状态观测器,包括:
27、将传统系统中的fal函数进行替换,替换为如下述公式(7)所示的非线性函数:
28、
29、其中,当|e|>>1时,β越小,k(e,a,b,β)≈ae2-β越大。同理,当|e|<<1时,β越小,k(e,a,b,β)≈beβ越大;
30、基于非线性函数,对传统扩张状态观测器进行改进,获得非线性扩张状态观测器。
31、优选地,步骤s4中,基于改进扩张状态观测器,结合微分平坦化后的欠驱动倒立摆系统,对受到外部干扰的小车位移和摆角进行自抗扰控制,包括:
32、基于改进扩张状态观测器,结合微分平坦化后的欠驱动倒立摆系统,构建与倒立摆系统等价的状态空间方程:
33、
34、基于状态空间方程,设计自抗扰控制器,对受到外部干扰的小车位移和摆角进行自抗扰控制。
35、优选地,自抗扰控制器包括:跟踪微分器,非线性误差反馈控制律以及非线性扩张状态观测器。
36、优选地,基于状态空间方程,设计自抗扰控制器,对受到外部干扰的小车位移和摆角进行自抗扰控制,包括:
37、设计跟踪微分器对小车的过渡过程进行安排;
38、通过非线性扩张状态观测器,对小车的扰动进行观测;
39、通过非线性误差反馈控制律,进行控制输入设置;
40、根据如下述公式(9),对控制量进行干扰补偿:
41、
42、一种基于微分平坦的倒立摆改进自抗扰控制系统,系统用于上述的基于微分平坦的倒立摆改进自抗扰控制方法,系统包括:
43、模型建立分析模块,用于建立倒立摆系统模型,对所述倒立摆系统模型的非最小相位特性进行分析;
44、系统建立模块,用于结合微分平坦理论重构倒立摆系统状态,获得微分平坦化后的欠驱动倒立摆系统;
45、函数改进模块,用于将传统fal函数替换为新非线性函数,改进扩张状态观测器;
46、自抗扰控制模块,用于基于所述改进扩张状态观测器,结合所述微分平坦化后的欠驱动倒立摆系统,对受到外部干扰的小车位移和摆角进行自抗扰控制。
47、优选地,模型建立分析模块,用于将单级倒立摆系统抽象为小车和均质细杆组成的系统;
48、基于所述倒立摆系统,当小车带动均质细杆移动时,忽略空气阻力和各种摩擦力,通过牛顿运动定律分析得到如下述公式(1)的系统非线性模型:
49、
50、其中,m为小车质量,m为摆杆质量,l为摆杆长度,ρ为小车距离初始零位置的距离,θ为摆杆与垂直地面的直线之间的角度,i为摆围绕质心的转动惯量,g为重力加速度。
51、一方面,提供了一种电子设备,所述电子设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现上述基于微分平坦的倒立摆改进自抗扰控制方法。
52、一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现上述基于微分平坦的倒立摆改进自抗扰控制方法。
53、上述技术方案,与现有技术相比至少具有如下有益效果:
54、上述方案,针对传统扩张状态观测器中参数复杂,且非线性函数是非有限时间收敛的问题,提出了一类固定时间收敛的新型非线性函数,这类函数具有优于fal函数的收敛性能。基于此函数设计了一种改进扩张状态观测器,调参简单方便,易于理解,且能够在参数调整下实现跟踪速度和跟踪精度的提升。
55、本发明提出了基于微分平坦的改进自抗扰控制方法对倒立摆系统进行控制,与滑模控制对比提升了系统的抗干扰能力,降低了非最小相位系统反向超调的影响,实现了外部干扰下小车位移和摆角的精准控制,解决了一类不稳定、不确定外扰的欠驱动倒立摆系统的控制问题。
- 还没有人留言评论。精彩留言会获得点赞!