一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法与流程
本发明属于自动驾驶、自动控制、振动控制,具体涉及一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法。
背景技术:
1、轨迹跟踪控制的本质是消除实际路径与期望路径之间的误差,需要对自动驾驶车辆的驱动系统和转向系统进行精准的协同控制,是一个高难度的复杂系统控制问题,特别的,对于带太阳翼板的自动驾驶车辆而言,当翼板展开时,车辆运动的改变会引起翼板的振动,剧烈的振动会损坏翼板且不利于整车的稳定;
2、面向该应用需求,本发明针对一类带太阳能翼板的自动驾驶车辆的轨迹跟踪问题,考虑车辆运动与翼板的相互作用,建立动力学模型,并考虑控制量饱和受限、参数不确定、环境干扰未知等实际问题,提出了一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法。
技术实现思路
1、本发明的目的是提供一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法,能够抑制翼板振动,减少翼板因剧烈振动而造成的损坏,减小了翼板振动对汽车轨迹跟踪的稳定性影响。
2、本发明采取的技术方案具体如下:
3、一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法,包括以下步骤:
4、s1:选用智能材料,建立控制模型;
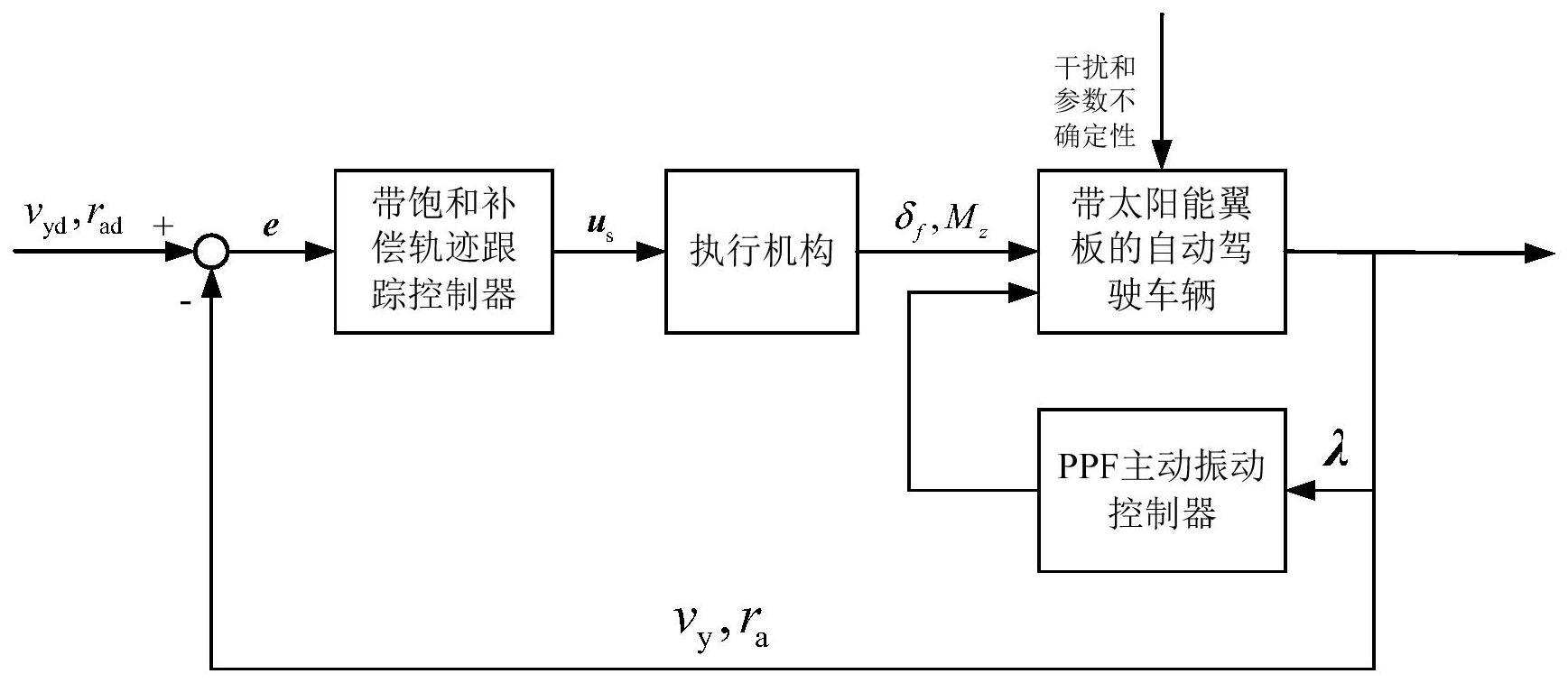
5、s2:在s1的基础上,构建带饱和补偿的自动驾驶车辆轨迹跟踪控制器,对所提出控制器进行稳定性证明;
6、s3:在s2的基础上,设计主动振动控制器。
7、进一步地,所述s1中的智能材料为压电传感器和作动器中的任意一种。
8、进一步地,所述s1包括以下步骤:
9、s101:在翼板上安装智能材料,翼板与汽车主体分别视为刚体和挠性体,采用混合坐标建模的方法,对刚体部分和挠性体部分分别建模;
10、s102:建立如下刚柔耦合的自动驾驶车辆模型:
11、
12、其中,m是车的总重量,vx、vy分别为纵向、横向速度,fyf、fyr分别为前后轮的侧偏力,ra为横摆角速度,lf为质心距前轴的距离,lr为质心距后轴的距离,iz为车辆绕z轴的转动惯量,mz为横摆力矩,d1、d2为干扰变量,fi为挠性翼板第i阶模态和车体的耦合系数(i=1,2,…n),li为挠性附件第i阶模态坐标,zi为挠性附件第i阶模态阻尼比,wi为挠性附件第i阶模态固有频率,ki为压电作动器与挠性附件第i阶模态的耦合系数,up为压电作动器的控制电压,n为考虑的模态数目;
13、fyf=cfaf, (2)
14、fyr=crar (3)
15、其中,cf和cr分别表示车辆前、后轮侧偏刚度,af和ar分别表示车辆前、后轮侧偏角,如下
16、
17、其中df为前轮胎转向角,b=arctan(vy/vx)≈vy/vx为车辆质心侧偏角;
18、s103:考虑车辆参数不确定性,即侧偏刚度是变化的,如下
19、
20、其中,cf0、cr0分别为侧偏刚度的标称值,δcf、δcr为其参数不确定项;
21、s104:考虑控制量饱和限制,系统控制量为横摆力矩mz和前轮胎转角df,定义dmax、mmax为系统所能提供的最大幅值,则两者限幅如下
22、
23、s105:建立跟踪误差模型,如下
24、
25、其中,r为参考路径,ex为横向轨迹误差,j为车辆期望横摆角与实际横摆角之间的误差,对横摆角进行小角度线性化,有
26、
27、s106:转换控制目标,根据车辆模型可知,轨迹跟踪的目标是通过设计df和mz,使得横向轨迹误差ex和航向误差j趋向于零,若有vy趋向于零,则有ex和j也趋向于零,将轨迹跟踪控制系统的控制目标转换为通过设计df和mz,使得横向速度vy趋向于零;
28、s107:将控制问题写成状态空间形式;
29、令x=[vy ra]t,u=[df mz]t,将系统模型整理为如下形式
30、
31、
32、
33、
34、定义有
35、
36、s108:设计集总干扰项,综合系统参数不确定性和未知干扰对控制系统的影响,将s103中的式(5)带入s107中的式(10)-(11),可得
37、
38、
39、作如下定义
40、
41、
42、a0、b0分别为矩阵a、b的固定项,由系统参数标称值确定,δa和δb分别为矩阵a、b的不确定项,由系统参数的变化产生,据此,状态空间矩阵可以分离为如下形式
43、
44、设计如下集总干扰项
45、ds=δax+δbu (17)
46、整理可得
47、
48、集总干扰ds将系统参数不确定产生的δa、δb和未知干扰d合并为一项;
49、s109:定义状态误差,定义期望状态为xd=[vyd rad]t,其中vyd为期望横向速度,rad为期望横摆角速度,则状态误差为e=x-xd,根据s103中的公式,vyd=0,期望横摆角速度可根据期望轨迹确定,如下
50、rd=rvx+a2
51、其中a2=-h2(j+h1sinhiex)coshiex,h1=h3/vx,h2≥h1vx,h3,i>0;
52、s110:综合s101~s109,提出自动驾驶车辆轨迹跟踪系统的控制目标,即:对于式(1)-(6)描述的车辆跟踪模型,通过设计控制量u,u满足式(13)中的限制条件,使得e趋向于零。
53、进一步地,所述s2包括以下步骤:
54、s201:对自动驾驶车辆轨迹跟踪系统工作条件提出如下假设:
55、1)自动驾驶车辆的系统参数在工作过程中变化,系统参数是有界的,上界未知;车辆所受干扰有界,上界未知,即存在未知常数dc≥0,使得||ds||≤dc;
56、2)系统状态矩阵a有界,上界未知,即存在未知常数am≥0,使得||a||≤am;
57、s202:设计集总干扰补偿参数d;
58、由假设1)-2)可知,ds有界、a有界;由步骤一(8)可知,xd有界,有界,因此是有界的,定义参数d为该表达式的上界,即
59、s203:设计反馈控制律us,公式为:
60、us=-χ(u)u, (19)
61、其中,χ=diag(c1,c2,c3)用来避免控制量超限,具体设计为
62、
63、u为控制律,设计为
64、
65、其中,k1>0,k2>0,p为控制量补偿参数,uad为自适应律,设计为
66、
67、其中e0>0,e1>0,s>0,s取很小的值,可调节轨迹跟踪误差。
68、s204:设计控制量限幅补偿参数p
69、对式(20)所给定的控制量限幅函数,存在常数d,使得0<d≤min(ci)≤1;为补偿该控制量限幅情况,参数p定义为可见,参数p是未知的、变化的;
70、s205:补偿参数的在线估计
71、由s201~s202和s203可知,参数d和p是未知的,采用参数估计方法,对两者进行在线估计,设分别为参数p、d的估计值,两者更新律设计如下:
72、当||e||≥s时,
73、
74、
75、其中,h0>0,h1>0;
76、s206:对所提出控制器进行稳定性证明;
77、取如下lyapunov函数
78、
79、其中,
80、对v微分有
81、
82、将式(19)-(22)的控制律带入式(26),可得
83、
84、当||e||≥s时,将式(23)-(24)的更新律带入式(27),可得
85、
86、带入自适应律,有
87、
88、进一步地,所述s3包括以下步骤:
89、s301:选用与布局智能材料,在太阳能翼板表面黏贴多对压电传感器或作动器;
90、s302:设计主动振动控制系统,当太阳能翼板由于振动发生形变,压电传感器会产生电压,设计为振动检测结构;当主动振动控制器输出控制电压作用于压电作动器,其会产生力作用于挠性附件,进而主动抑制振动;
91、s303:设计主动控制器输出电压,根据多模态ppf控制的原理,通过多个ppf控制器并联实现压主动振动控制,每个ppf控制器针对一个特定模态进行控制;
92、电作动器的控制电压设计为
93、up=λtgξ (30)
94、其中所有元素均为1,b为所需控制的模态数目,c为ppf控制器数目,ξ为ppf补偿器的坐标向量,由下式求得
95、
96、其中,p为系数向量,与ppf传感器位置、尺寸、材料等因素相关,pc为补偿器的阻尼矩阵,ωc为补偿器的频率矩阵,λ=[l1,l2,…ln]t为太阳能翼板挠性模态矩阵。
97、本发明取得的技术效果为:
98、本发明的一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法考虑翼板展开情况下,车体运动与翼板的相互影响,建立了刚柔耦合的自动驾驶车辆模型,为太阳能翼板设计了主动振动抑制方法,抑制了翼板振动,减少翼板因剧烈振动而造成的损坏,减小了翼板振动对汽车轨迹跟踪的稳定性影响。
99、本发明的一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法设计了控制量饱和补偿方案,抑制了控制量饱和对系统的不利影响,并给出了控制量饱和情况下的系统稳定性证明,保证了自动驾驶车辆轨迹跟踪控制系统的稳定性。
100、本发明的一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法设计了集总干扰项将系统参数不确定的和未知干扰合并为一项,在设计控制器时,只需对集总干扰进行补偿即可,无需分开考虑两者的影响,减少了计算量和控制器的应用难度。
101、本发明的一种带太阳能翼板的自动驾驶车辆轨迹跟踪控制方法通过控制参数的可调节跟踪精度,自动驾驶车辆轨迹跟踪误差可设计,实用性强。
- 还没有人留言评论。精彩留言会获得点赞!