基于模型预测控制的自动驾驶汽车交互性决策规划方法
本发明属于自动驾驶汽车领域,涉及一种基于模型预测控制的自动驾驶汽车交互性决策规划方法。
背景技术:
1、自动驾驶技术可以提高道路通行效率以及驾驶安全性,受到了世界各国研究人员的广泛关注。完整的自动驾驶系统通常包括环境感知、轨迹预测、决策规划、控制等模块,其中,决策规划模块是自动驾驶汽车的核心模块之一,其强烈依赖于感知预测模块的输出,决定了自动驾驶汽车具体的运动。
2、现阶段,自动驾驶汽车的决策规划方法主要包括基于图搜索、基于采样、基于优化以及基于学习的方法。基于优化的方法由于其可解释性好、适应能力强等优点,得到了广泛应用。在基于优化的方法中,基于模型预测控制(model predictive control,mpc)的方法由于能够处理多约束优化问题且规划的轨迹符合车辆的动力学约束,逐渐成为自动驾驶汽车决策规划主流方法。传统的自动驾驶汽车系统大都将周车轨迹预测和自车决策规划作为两个独立的单向模块,决策规划单纯的基于轨迹预测产生动作,然而,并未考虑到自车的未来规划也会对周车轨迹预测产生影响。自动驾驶系统的轨迹预测和决策规划是两个相互耦合的模块,自车的规划需要考虑到周车的未来轨迹,但同时,他车的未来轨迹也受到汽车规划的影响,传统的基于模型预测控制的决策规划方法并未考虑到这种交互作用,会导致轨迹预测精度较低、决策规划过于保守等问题,难以保证自动驾驶汽车的行驶安全性。
3、因此,亟需一种能够有效结合轨迹预测信息的交互性决策规划方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种联合周围车辆轨迹预测的自动驾驶汽车交互性决策规划方法,该方法能够在自车运动规划过程中考虑自车规划对周围车辆运动的影响,并让自动驾驶汽车能够以自身最小代价为目标进行交互性规划,综合考虑了自车与周车的交互影响,不仅降低了决策规划的保守性,而且能够提升轨迹预测模块的精度,提升了自动驾驶汽车在复杂环境下的安全性与通行效率。
2、为达到上述目的,本发明提供如下技术方案:
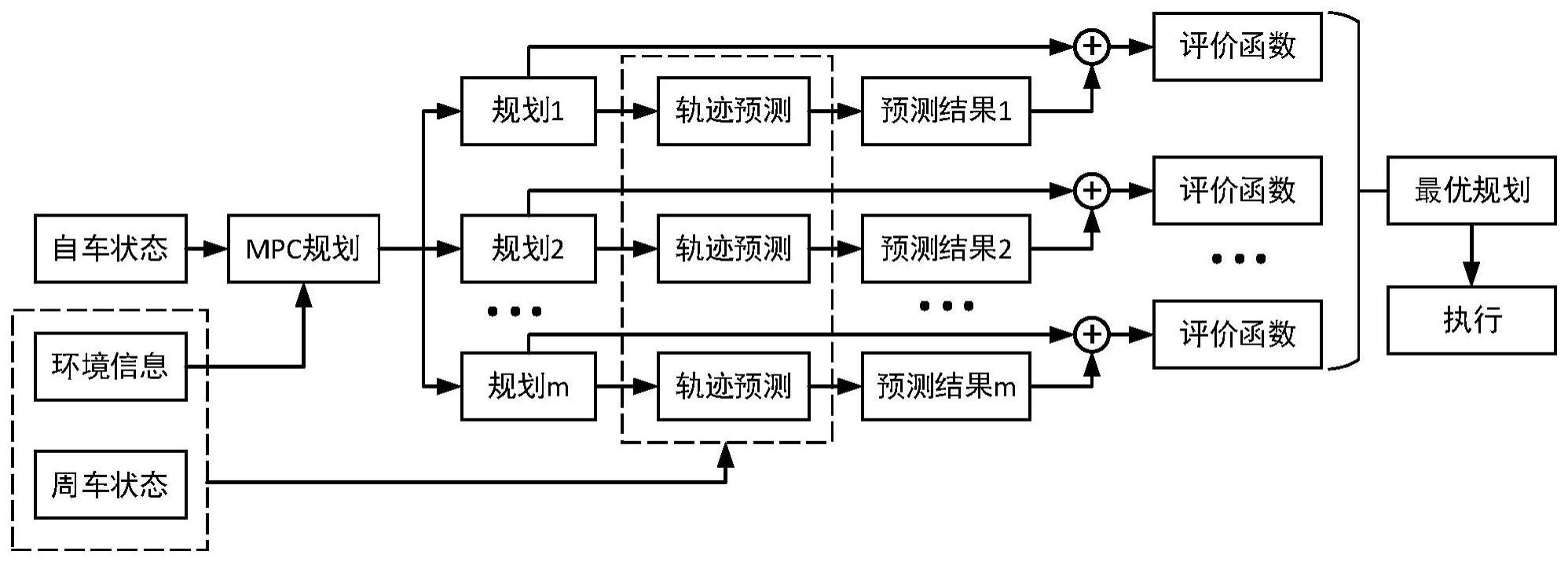
3、一种基于模型预测控制的自动驾驶汽车交互性决策规划方法,具体包括以下步骤:
4、s1:构建基于模型预测控制(mpc)的运动规划模型,基于当前环境信息,规划出多条自车轨迹;
5、s2:构建基于深度学习的周车轨迹预测模型,基于周车历史状态、地图信息以及自车的不同规划,输出多条未来预测结果;
6、s3:构建规划评价函数,根据步骤s1中的规划和步骤s2中轨迹预测结果,选择最优规划。
7、进一步,步骤s1中,构建基于mpc的运动规划模型,具体包括以下步骤:
8、s11:设定自车运动模型;
9、s12:参考路径参数化表示:对自车当前所处车道、左车道或右车道的中心线分别利用三次多项式进行参数化表示;如果无左或右车道,则只参数化当前所处车道的中心线;其中,各车道的中心线简称为参考线;
10、s13:建立关于参考线的误差模型:对于某条参考路径,将自动驾驶汽车与参考线的误差采用轮廓误差和滞后误差来衡量;
11、s14:构建代价函数,使得自动驾驶车辆在跟踪参考路径的同时尽量保持参考速度,同时惩罚控制量使其产生光滑的轨迹;
12、s15:设计mpc多规划生成策略:基于不同的参考路径和参考速度,重复s12~s15步骤,生成多条规划。
13、进一步,步骤s12具体包括:将参考线上的x,y坐标分别表示成关于参考线弧长s的函数关系式:
14、
15、其中,i表示当前车道上分段路径的序号;a,b,c,d分别表示三次多项式的各个系数;si表示上一段路径结束端点对应的弧长值,s表示参考线弧长;当前车道上所有分段路径组成xref(s)和yref(s);x和y分别表示车辆的纵向和横向位置;
16、由上式能得出,对于某车道上路径上任意一点m,其对应的参考线弧长为sm,则其对应的参考方位角为:
17、进一步,步骤s13具体包括:对于某条参考路径,将自动驾驶汽车与参考线的误差采用轮廓误差和滞后误差来衡量:
18、
19、
20、其中,ec表示轮廓误差(contour error),el表示滞后误差(lag error);xk,yk表示自动驾驶车辆在k时刻所处的位置;b点表示参考点,其在k时刻对应的参考线弧长为在mpc的控制时域内,参考点的迭代更新由虚拟速度控制,表述如下:
21、
22、其中,δt表示时间间隔。
23、进一步,步骤s14具体包括:mpc控制时域内阶段代价函数如下:
24、
25、其中,表示变量x的二范数并且乘以权重参数q;w={qc,ql,qv,qu,qε,ρ}是权重矩阵的集合;表示自车的控制量;vref表示参考速度;εk表示松弛因子;
26、基于上述定义,在mpc控制时域h内,整体代价函数定义如下:
27、
28、s.t.zk+1=f(zk,uk)
29、
30、
31、zmin≤zk≤zmax
32、umin≤uk≤umax
33、
34、z0-zinit
35、其中,zk+1=f(zk,uk)表示步骤s11中建立的自车运动模型经离散后的表达形式;表示虚拟速度的更新过程;表示道路边界约束;zmin≤zk≤zmax和umin≤uk≤umax分别表示自车状态量约束和控制量约束,zmin表示状态量下限值,zmax表示状态量上限值,umin表示控制量下限值,umax表示控制量上限值;zinit和sinit分别表示在每次规划初始时刻自车的状态以及对应的参考线弧长,初始时刻参考线弧长sinit可通过参考线上距离自车当前状态最近点对应的弧长获得;表示终端代价;
36、通过非线性求解器求解该问题,可获得在预测时域内自车的最优控制量进而可以获得自车在预测时域内的状态则在该条参考路径和参考速度下,对应的规划定义为:
37、进一步,步骤s15具体包括:参考路径最多存在三条,即当前车道中心线、左车道中心线和右车道中心线;在每条参考路径上的参考速度是根据自车当前所处环境可行驶最高车速vmax进行离散,即:
38、v0=0
39、
40、
41、…
42、vn=vmax
43、其中,n表示当前车道上速度离散数量,可根据实际情况进行调整;
44、则针对每一条参考车道和不同参考速度,有:
45、
46、
47、
48、所有规划组成当前状态下自车规划集p={pcur_line,pleft_line,pright_line},其中,pcur_line,pleft_line,pright_line分别表示参考线为当前车道、左车道、右车道对应的规划集,分别表示参考线为当前车道、左车道、右车道时在参考速度为vn时对应的规划。
49、进一步,步骤s2具体包括以下步骤:
50、s21:轨迹预测模型输入:该轨迹预测模型的输入分为三个部分,第一部分为自车以及所有周围车辆在[t-th:t]的历史轨迹信息ht,第二部分为所有车辆在当前时刻t对应的向量化的地图序列mt,第三部分为自车在当前时刻的某条规划信息pt:
51、xt=[ht,mt,pt]
52、
53、
54、其中,n表示某辆车的id,0表示自车;表示车辆n在[t-th:t]的历史轨迹信息,每一个时刻的轨迹包括纵坐标、横坐标、航向角和速度信息;表示车辆n在当前时刻对应的地图序列信息;
55、s22:获取动力学特征:将历史轨迹序列信息ht首先经过全连接层升维,然后输入进leaky_relu激活函数,最后再通过lstm(长短时记忆网络)进行编码,获得每辆车的动力学特征;
56、s23:获取地图特征:将向量化的地图序列mt通过lstm进行编码,获的地图特征;
57、s24:获取交互特征:将步骤s22中提取到的动力学特征,输入到两层的gat(图注意网络)中,获取交互特征;
58、s25:解码未来轨迹:将获得的动力学特征、交互特征、地图特征通过联接操作获得总体特征;将某条规划序列信息pt经过1stm编码获得规划特征,然后将解码gru(门控循环单元)的隐藏层状态设置为规划特征;最后将总体特征输入进gru中,获得该条规划p下对应的周围车辆未来的轨迹输出ytp:
59、
60、
61、其中,表示预测网络输出的在(t:t+th]上的x,y坐标;
62、s26:获取多条规划的未来预测结果:针对步骤s1中建立的自车规划集p中的每一条规划p,重复执行s21~s25步骤,获得未来预测集y:y=[ytp1,ytp2,...,ytpn]。
63、进一步,步骤s3具体包括以下步骤:
64、s31:构建评价函数:评价函数由安全指标esafe、效率指标eefficiency以及舒适性指标esafe组成:
65、eval(p,ytp)=w1esafe+w2eefficiency+w3ecomfort
66、其中,w1、w2、w3为各项指标的权重;安全指标esafe用于惩罚该规划下自车与预测的周车发生碰撞以及距离周车距离过近;效率指标eefficiency用于鼓励选择速度较高的规划;舒适性指标esafe用于鼓励选择舒适性较高的规划;
67、s32:选择最优规划:基于步骤s31定义的评价函数,将自车规划集p中的每一条规划p及其对应的未来预测yp输入进评价函数中,选择代价最优的规划,代价最优的规划是自动驾驶车辆在当前环境状态下综合安全、效率和舒适下的最优规划。
68、本发明的有益效果在于:
69、1)本发明设计了一种基于模型预测控制的运动规划方法,并设计了mpc多规划生成策略,该方法可以根据不同参考线以及不同的参考速度生成多条未来规划,更加符合实际情况。
70、2)本发明构建了基于深度学习的轨迹预测模型,该模型可以提取车辆的动力学特征、地图特征、交互特征,并通过在解码过程中融入了自车的规划,考虑到了自车规划对于预测结果的影响,提升了轨迹预测的精度。
71、3)本发明通过设计的规划评价函数来评价生成的规划,并从多条规划中根据周车轨迹预测结果选择最优规划执行,相比与传统的基于预测结果的单向决策规划,考虑到了自车与周车的交互影响,降低了决策规划的保守性。
72、本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!