一种阀门定位器控制参数寻优方法与系统与流程
本发明涉及阀门,尤其涉及一种阀门定位器控制参数寻优方法与系统。
背景技术:
1、阀门定位器能够极大地改善气动阀门系统的动态响应和稳态特性,因此在工业控制中有着广泛的应用。其中,控制算法作为阀门定位器的核心技术部分,直接关系到工业生产过程中的效率和安全问题。由于阀门定位器多使用pid控制器,因此,针对各类阀门定位器如何找到合适的pid控制参数具有非常重要的意义。
2、目前现有的pid控制参数选取方法多为使用数学模型计算,此类方法适用于能用数学模型精确描述的控制对象,而气动阀门系统由于涉及到电气、磁场、流体等多学科的交叉,因此具有很强的非线性,难以用数学模型准确地描述。因此,使用数学模型计算得到的pid控制参数使控制器整定不良,控制效果不理想且不能适用于各种不同类型的阀门系统。
3、现有技术主要存在以下缺陷,一是现有的pid控制参数选取方法不能很好地适应非线性气动阀门系统,导致控制器整定不良、控制效果不理想;二是现有的pid控制参数选取方法不能适用于各种不同类型的阀门系统,通用性差;三是现有的pid控制参数选取方法不能适应实际生产过程中存在的老化、磨损、填料不同等变量的差异,对实际生产过程的适应性差;四是现有的pid控制参数选取方法往往计算复杂,可行性、实用性不高。
技术实现思路
1、鉴于上述的分析,本发明旨在提供一种阀门定位器控制参数寻优方法与系统,用以解决现有pid控制参数选取方法不能很好地适应非线性阀门系统、控制效果不理想、通用性差、对实际生产过程的适应性差、实用性不高的问题。
2、本发明提供了一种阀门定位器控制参数寻优方法,所述方法包括以下步骤:
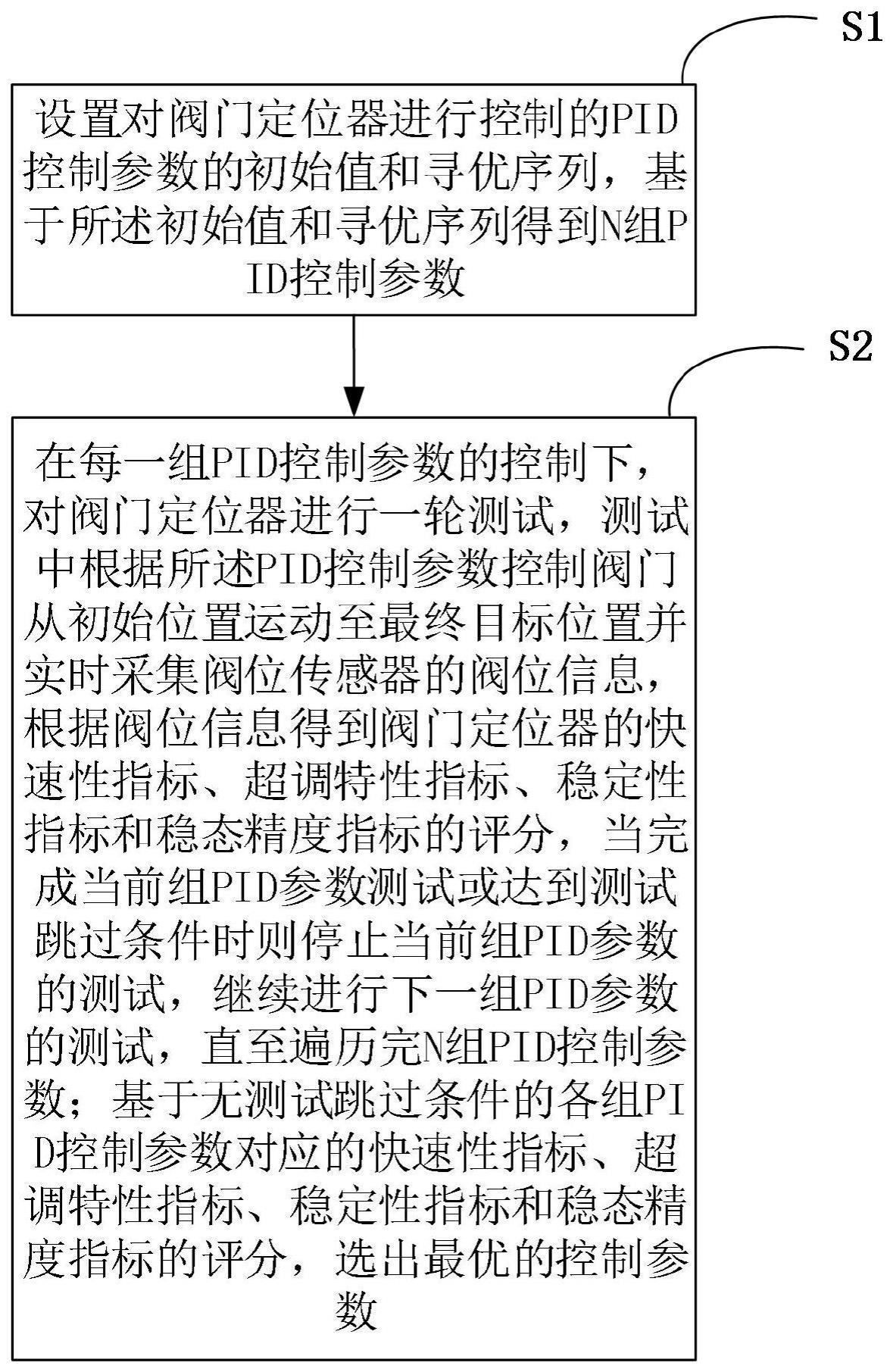
3、设置对阀门定位器进行控制的pid控制参数的初始值和寻优序列,基于所述初始值和寻优序列得到n组pid控制参数;
4、在每一组pid控制参数的控制下,对阀门定位器进行一轮测试,测试中根据所述pid控制参数控制阀门从初始位置运动至最终目标位置并实时采集阀位传感器的阀位信息,根据阀位信息得到阀门定位器的快速性指标、超调特性指标、稳定性指标和稳态精度指标的评分,当完成当前组pid参数测试或达到测试跳过条件时则停止当前组pid参数的测试,继续进行下一组pid参数的测试,直至遍历完n组pid控制参数;基于无测试跳过条件的各组pid控制参数对应的快速性指标、超调特性指标、稳定性指标和稳态精度指标的评分,选出最优的控制参数。
5、进一步地,所述每一组pid控制参数为三个,每个参数有对应的初始值与寻优序列,每个控制参数的初始值与其相应的寻优序列中的各元素的乘积作为每个控制参数的扩展参数,各个控制参数的扩展参数进行组合得到n组pid控制参数。
6、进一步地,所述测试跳过条件包括:测试过程中发生大幅度的振荡、发生多次小幅度的振荡、任一指标低于阈值、测试者中止测试任务。
7、进一步地,根据所述pid控制参数控制阀门从初始位置运动至最终目标位置并实时采集阀位传感器的阀位信息,根据阀位信息得到阀门定位器的快速性指标、超调特性指标、稳定性指标和稳态精度指标的评分,包括:基于阀门的最终目标位置将测试过程划分为若干测试段,每个测试段有各自的初始位置和目标位置;
8、在每个测试段,基于对应pid控制参数控制阀门从初始位置运动到目标位置,从阀位指令改变时起到阀门到达目标位置并进入稳态后一段时间为止,实时采集阀位传感器的阀位信息;
9、对每个测试段,根据阀位信息得到阀门定位器的快速性指标、超调特性指标、稳定性指标和稳态精度指标;
10、对所有测试段的所述四种指标分别进行汇总,得到四种指标的评分。
11、进一步地,所述根据阀门位置信息得到阀门定位器的快速性指标包括:
12、根据阀门位置信息得到延迟时间和调节时间,所述延迟时间为从初始位置开始到达目标位置与初始位置距离的50%时经过的时间,所述调节时间为从初始位置开始到达目标位置与初始位置距离的95%时经过的时间;
13、基于延迟时间和调节时间得到快速性指标。
14、进一步地,采用如下方式得到快速性指标:
15、
16、其中,fastperformance为快速性指标,f1为延迟时间的权重,c1为延迟时间的阈值,t50为延迟时间,f2为调节时间的权重,c2为调节时间的阈值,t95为调节时间,f1+f2=1,fastperformance∈[0,100]。
17、进一步地,所述根据阀门位置信息得到阀门定位器的超调特性指标包括:
18、根据阀门位置信息得到超调量,所述超调量为第一次到达目标位置时起至其后第一次小于目标位置时止阀门位置与目标位置距离的最大值;
19、基于超调量得到超调特性指标,其公式为:
20、
21、其中,overshootperformance为超调特性指标,d为超调量的阈值,overshoot为超调量,overshootperformance∈[0,100]。
22、进一步地,所述根据阀门位置信息得到阀门定位器的稳定性指标包括:
23、根据阀门位置信息得到阀门响应进入稳态的时间点,所述阀门响应进入稳态的时间点为自该时间点之后阀门位置与目标位置的距离保持小于阈值;
24、计算阀门响应进入稳态后一段时间内的位置标准差;
25、基于位置标准差得到稳定性指标,其公式为:
26、
27、其中,stabilityperformance为稳定性指标,e为位置标准差的阈值,σ为位置标准差,m为幂次,stabilityperformance∈[0,100]。
28、进一步地,所述根据阀门位置信息得到阀门定位器的稳态精度指标包括:
29、根据阀门位置信息得到阀门响应进入稳态的时间点;
30、计算阀门响应进入稳态后一段时间内阀门位置与目标位置的绝对误差平均值;
31、基于绝对误差平均值得到稳态精度指标,其公式为:
32、
33、其中,precisionperformance为稳态精度指标,f为绝对误差平均值的阈值,ε为绝对误差平均值,precisionperformance∈[0,100]。
34、进一步地,所述系统包括以下部分:
35、数据采集模块,用于通过阀位传感器实时采集阀门运动过程中的阀位信息并发送至数据处理模块;
36、控制模块,包括pid控制器,每接收一组pid控制参数,pid控制器基于该pid控制参数输出pwm控制信号给阀门,控制阀门进行运动,进行一轮测试;当接收到停止指令则控制阀门运动到初始零位;
37、数据处理模块,依次将各组pid参数发送给控制模块,并通过获取到的阀位信息,计算得到阀门定位器的快速性指标、超调特性指标、稳定性指标和稳态精度指标;对所述四种指标分别进行汇总,得到四种指标的评分;在测试过程中,当完成当前组pid参数测试或达到测试跳过条件时则发送停止指令给控制模块并停止当前组pid参数的测试,向控制模块发送下一组pid参数,直至遍历完n组pid控制参数;基于无测试跳过条件的各组pid控制参数对应的所述四种指标的评分,选出最优的控制参数并输出结果;
38、pid控制参数模块,用于设定控制参数的初始值和寻优序列,基于所述初始值和寻优序列得到n组pid控制参数,并将各组pid控制参数依次发送至数据处理模块。
39、与现有技术相比,本发明至少可实现如下有益效果之一:
40、1、本发明采用自动化测试的方式得到阀门定位器控制品质的指标评分,根据所述评分得到最优的pid控制参数,评分越高代表控制效果越好,因此优选出的控制参数可以很好地适应包含了电气、磁场、流体多学科的非线性气动阀门系统、控制效果理想。
41、2、本发明采用统一的自动化测试流程,可应用于任意种类的气动阀门系统,通用性强。
42、3、本发明采用试验的方式,在合理范围内对pid控制参数进行寻优,测试结果反应了生产过程中存在的缸体中弹簧老化变形、阀杆衬套磨损、调节阀粘滞特性、填料不同等变量的差异,能很好地适应实际的生产情况。
43、4、本发明采用自动化测试的方式,不需要建立复杂的数学模型,不用人为干预,因此具有很强的可行性和实用性。
44、5、本发明设置了测试跳过条件,可以快速跳过不合适的参数组,减少测试任务量,大幅缩短测试时间,从而提高参数寻优的效率。
45、6、本发明的阀门定位器控制品质的指标评分对阀门响应过程中的瞬态特性和稳定性进行了考察,能反应阀门的实际控制情况,从而实现了对阀门定位器控制品质的全面评价,提高了阀门问题检测、算法优化的效率;
46、7、本发明通过快速性指标、超调特性指标、稳定性指标和稳态精度指标给出控制品质的评分,提供了量化评价方法,从而能直观地得到品质评级;
47、8、本发明的测试系统通过数据采集模块采集阀位传感器的阀位信息,测试系统结构简单,不需要额外的仪器仪表,并且重复一致性高。
48、本发明中,上述各技术方案之间还可以相互组合,以实现更多的优选组合方案。本发明的其他特征和优点将在随后的说明书中阐述,并且,部分优点可从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过说明书以及附图中所特别指出的内容中来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!