一种数字孪生混合动力系统的故障诊断系统及方法
本发明属于无人机故障诊断,具体涉及一种数字孪生的混合动力系统的故障诊断系统及方法。
背景技术:
1、现阶段,无人机市场扩张迅速。以纯发动机驱动的无人机虽有良好的动力性能但会造成资源的损耗;以纯电动驱动的无人机稳定性好且对环境污染小,但续航时间短不能满足需求。而采用混合动力系统的无人机则能弥补上述不足,在满足性能需求的同时减少了资源的浪费。混合动力无人机的发展正处于待完善状态,工作环境常常具有多方面的不确定性,出现故障的几率相较于传统技术的无人机会更高。当混合动力无人机出现非致命的故障时,为了安全无人机必须先进行故障诊断,并及时排除存在的安全隐患,而在无人机正常运行过程中,也需要实时监测无人机的系统安全情况,这就要求其故障诊断系统需要具备一定的故障诊断能力以及故障预测能力。
2、传统的故障诊断方法在进行故障诊断时存在误诊断和漏诊的风险,自动学习能力差,故障数据收集过程以及故障诊断过程需要花费大量的人力和时间,且没有充分利用故障诊断的历史数据。例如中国发明专利申请号为cn201810341681.6名称为“基于贝叶斯网络的民机复杂系统故障诊断方法”中公开了将飞机复杂系统所采集的飞行数据作为贝叶斯网络故障表现层,将复杂系统中对飞机正常飞行有重要影响的关键故障作为贝叶斯网络故障原因层,再通过贝叶斯结构学习以及参数学习算法建立复杂系统贝叶斯故障诊断网络模型,贝叶斯故障诊断网络模型加载推力算法,对系统的故障进行诊断;中国发明专利申请号为cn201811306822.7名称为“一种基于贝叶斯网络的飞控系统故障诊断方法”中公开了对整个系统做相关性分析,建立每一个外场可更换单元的信号输入和信号输出关系,形成飞控系统的从顶层信号输入到末端信号响应的多个信号链关系,模拟每个外场可更换单元的实体模块发生故障,形成飞控系统各类故障描述清单,将飞控系统的每个外场可更换单元及实体模块之间的关系对应成贝叶斯网络的父节点与子节点关系,形成整个系统的贝叶斯诊断模型。
3、但是上述方法在进行故障诊断时,均未考虑当系统出现非致命故障时如何快速高效进行故障诊断,以及如何充分利用系统自身产生的运行数据构建历史数据库,从而增强故障诊断系统的故障诊断精度和故障预测能力。
技术实现思路
1、针对于上述现有技术的不足,本发明的目的在于提供一种数字孪生的混合动力系统的故障诊断系统及方法,以解决现有技术中无法对无人机混合动力系统的非致命故障进行快速高效诊断、故障诊断精度低、故障预测能力弱,以及未充分利用系统自身历史运行数据的问题。
2、为达到上述目的,本发明采用的技术方案如下:
3、本发明的一种数字孪生的混合动力系统的故障诊断系统,包括:混合动力系统、数字孪生混合动力系统、云数据平台、云端计算系统、危险故障预警模块和故障预测预警模块;所述混合动力系统和数字孪生混合动力系统均与云数据平台数据连接,所述云数据平台还与云端计算系统数据连接,云端计算系统分别与危险故障预警模块和故障预测预警模块数据连接;
4、所述混合动力系统包括:机身、控制系统、传感器、第一机翼、第二机翼、尾翼、主螺旋桨、第一机翼电机、第二机翼电机、第三机翼电机、第四机翼电机、第一机翼螺旋桨、第二机翼螺旋桨、第三机翼螺旋桨、第四机翼螺旋桨、发动机、发电机、动力电池组、电动机、离合器、升降舵;
5、所述第一机翼、第二机翼分别设置在机身两侧;
6、所述尾翼位于机身的尾部,通过连接杆与机身固连;
7、所述发动机、离合器、发电机、动力电池组、传感器均设置在所述机身内;
8、所述第一机翼电机、第二机翼电机均设置在所述第一机翼的前缘,第一机翼电机的输出轴与第一机翼螺旋桨的转轴固连,第二机翼电机的输出轴与第二机翼螺旋桨的转轴固连;
9、所述第三机翼电机、第四机翼电机分别设置在所述第二机翼的前缘,第三机翼电机的输出轴与第三机翼螺旋桨的转轴固连,第四机翼电机的输出轴与第四机翼螺旋桨的转轴固连;
10、所述升降舵通过连接杆与机身连接,用于控制机身的俯仰转角;
11、所述主螺旋桨设置在机身的尾部,其转轴通过所述离合器和发动机的输出轴相连;
12、所述发动机的输出轴还通过动力耦合器与发电机的输入轴相连;
13、所述控制系统分别与传感器、发动机、发电机电气相连;
14、所述动力电池组与发电机、电动机电性相连;
15、所述电动机的输出轴通过动力耦合器与各螺旋桨的转轴相连;
16、所述数字孪生混合动力系统包括:数字孪生机身、数字孪生控制系统、数字孪生传感器、数字孪生第一机翼、数字孪生第二机翼、数字孪生尾翼、数字孪生主螺旋桨、数字孪生第一机翼电机、数字孪生第二机翼电机、数字孪生第三机翼电机、数字孪生第四机翼电机、数字孪生第一机翼螺旋桨、数字孪生第二机翼螺旋桨、数字孪生第三机翼螺旋桨、数字孪生第四机翼螺旋桨、数字孪生发动机、数字孪生发电机、数字孪生动力电池组、数字孪生电动机、数字孪生离合器、数字孪生升降舵;
17、所述数字孪生第一机翼、数字孪生第二机翼分别设置在数字孪生机身两侧;
18、所述数字孪生尾翼位于机身的尾部,通过数字孪生连接杆与数字孪生机身固连;
19、所述数字孪生发动机、数字孪生离合器、数字孪生发电机、数字孪生动力电池组、数字孪生传感器均设置在所述数字孪生机身内;
20、所述数字孪生第一机翼电机、数字孪生第二机翼电机均设置在所述数字孪生第一机翼的前缘,数字孪生第一机翼电机的输出轴与数字孪生第一机翼螺旋桨的转轴固连,数字孪生第二机翼电机的输出轴与数字孪生第二机翼螺旋桨的转轴固连;
21、所述数字孪生第三机翼电机、数字孪生第四机翼电机均设置在所述数字孪生第二机翼的前缘,数字孪生第三机翼电机的输出轴与数字孪生第三机翼螺旋桨的转轴固连,数字孪生第四机翼电机的输出轴与数字孪生第四机翼螺旋桨的转轴固连;
22、所述数字孪生升降舵通过数字孪生连接杆与数字孪生机身连接,用于控制数字孪生机身俯仰转角;
23、所述数字孪生主螺旋桨设置在数字孪生机身的尾部,其转轴通过所述数字孪生离合器和数字孪生发动机的输出轴相连;
24、所述数字孪生发动机的输出轴还通过数字孪生动力耦合器与数字孪生发电机的输入轴相连;
25、所述数字孪生控制系统分别与数字孪生传感器、数字孪生发动机、数字孪生发电机通过数字孪生的虚拟电气相连;
26、所述数字孪生动力电池组与数字孪生发电机、数字孪生电动机通过数字孪生的虚拟电气相连;
27、所述数字孪生电动机的输出轴通过数字孪生动力耦合器与各数字孪生螺旋桨的转轴相连;
28、所述云数据平台,用于混合动力系统和数字孪生混合动力系统的信息存储、交互;
29、所述云端计算系统,用于分析从云数据平台获取的混合动力系统的状态信息和数字孪生混合动力系统的状态信息,并进行实时计算;
30、所述故障预测预警模块通过网络接收云端计算系统发送的预警信息,用于预警可能发生故障的系统位置;
31、所述危险故障预警模块通过网络接收云端计算系统发送的预警信息,用于预警发生非致命故障的系统位置。
32、进一步地,所述发动机为油动发动机。
33、进一步地,所述发电机用于发电并将电能存储到动力电池组内。
34、进一步地,所述数字孪生发电机用于产生虚拟电能并将虚拟电能存储到所述数字孪生动力电池组内。
35、本发明的一种数字孪生的混合动力系统的故障诊断方法,基于上述系统,步骤如下:
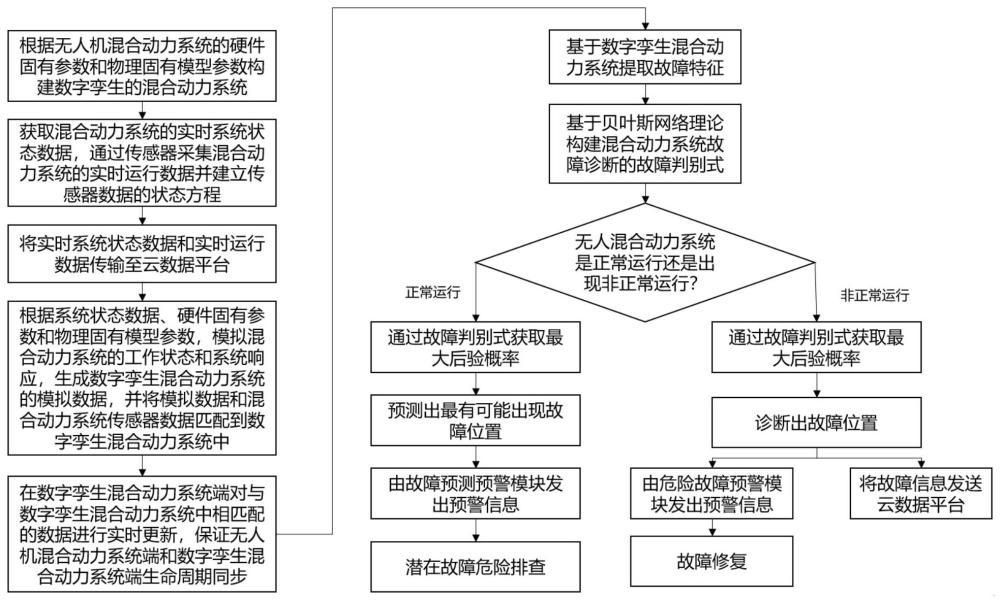
36、步骤1)根据无人机混合动力系统的硬件固有参数和物理固有模型参数构建数字孪生混合动力系统;
37、步骤2)获取混合动力系统的实时系统状态数据,通过传感器采集混合动力系统的实时运行数据并建立传感器数据的状态方程,并将实时系统状态数据和实时运行数据传输至云数据平台;
38、步骤3)根据所述步骤2)中的系统状态数据和所述步骤1)中的硬件固有参数和物理固有模型参数,对混合动力系统的系统逻辑进行分析,模拟混合动力系统的工作状态和系统响应,生成数字孪生混合动力系统的模拟数据,并将模拟数据和混合动力系统传感器数据匹配到数字孪生混合动力系统中,对与数字孪生混合动力系统中相匹配的数据进行实时更新,保证混合动力系统和数字孪生混合动力系统生命周期同步;
39、步骤4)基于数字孪生混合动力系统提取的故障特征,构建混合动力系统故障诊断的故障判别式;
40、步骤5)若无人机混合动力系统正常运行,则经过时间t后通过所述步骤4)中构建的故障判别式获得最大后验概率估计值所对应的可能的故障类型,并由故障预测预警模块发送预警信息,以警示故障类型所对应的位置可能出现故障的概率;若无人机混合动力系统非正常运行,则通过所述步骤4)中构建的故障判别式获得最大后验概率估计值所对应的故障类型,并由危险故障预警模块发送预警信息,以警示具体出现故障的位置,同时将出现故障的位置、每一个特征节点对应的概率信息上传至云数据平台进行存储。
41、进一步地,所述步骤1)中的硬件固有参数为无人机混合动力系统的各结构的几何尺寸特征、结构材质及零部件之间的固有装配关系。
42、进一步地,所述步骤1)中的物理固有模型参数包括:无人机的控制系统参数、发动机参数、电动机参数、动力电池组参数、机翼电机参数、信号传输参数、螺旋桨参数、连接件参数、无人机空气动力学参数、发动机模型参数、电动机模型参数、控制系统模型参数、机翼电机模型参数。
43、进一步地,所述步骤2)中的实时系统状态数据包括:无人机的工作运行状态、无人机控制系统状态、无人机动力系统的数据分配和执行机构的状态;
44、无人机的工作运行状态包括:发动机功率、电动机的功率、电磁离合器的开度以及动力耦合器的状态;
45、无人机控制系统状态包括:控制点状态、稳态误差、瞬时误差、实时反馈信号;
46、无人机动力系统的数据分配包括:发动力供能的占比、电动机供能的占比状态、动力电池组的状态;
47、执行机构的状态包括:电机的运行状态、螺旋桨的转速、机身偏转的俯仰角、无人机的速度、加速度情况。
48、进一步地,所述步骤2)中的传感器包括:温度传感器、振动传感器、速度传感器、加速度传感器、电流传感器、力矩传感器、俯仰角传感器。
49、进一步地,所述步骤2)中的实时运行数据包括:温度信息、振动信息、速度信息、加速度信息、电流信息、力矩信息、俯仰角信息。
50、进一步地,所述步骤2)中的传感器数据的状态方程为:
51、
52、式中,x(k)为k时刻的传感器信息;x(k-1)为k-1时刻的传感器信息;为k-1时刻的传感器信息的导数;ts为k-1时刻到k时刻的时间步长;传感器信息包括:系统内部温度t、无人机速度v、无人机加速度a、第一机翼电机电流i1、第二机翼电流i2、各螺旋桨所受力矩m、机身俯仰角θ。
53、进一步地,所述步骤4)中的构建混合动力系统故障诊断的故障判别式具体包括以下步骤:
54、41)获取数字孪生混合动力系统的故障特征输入;
55、通过贝叶斯网络构建混合动力系统故障诊断模型,模型由故障特征值层和故障类型判别层组成,其中故障特征值层节点取值由数字孪生混合动力系统输入,输入值为数字孪生混合动力系统最近一次的实时系统状态数据和实时运行数据,包括振动特征节点输入值、动态性能特征节点输入值、监测与报警信息特征节点输入值;
56、振动特征节点z1、z2、z3分别为数字孪生机身上的振动传感器节点、数字孪生机翼上的振动传感器节点和数字孪生发动机上的振动传感器节点,数字孪生机身振动传感器节点用于判断数字孪生机身的结构松动故障,数字孪生机翼振动传感器节点用于判断数字孪生机翼电机故障,数字孪生发动机振动传感器节点用于判断数字孪生发动机气缸故障;
57、动态性能特征节点d1、d2,d3分别为数字孪生速度传感器、数字孪生第一姿态传感器和数字孪生第二姿态传感器;数字孪生速度传感器用于判断数字孪生发动机故障,数字孪生第一姿态传感器用于判断数字孪生升降舵故障,数字孪生第二姿态传感器用于判断各数字孪生机翼电机故障;
58、监测与报警信息特征节点j1、j2、j3、j4、j5、j6分别为数字孪生温度传感器、数字孪生压力传感器、数字孪生第一电流传感器、数字孪生第二电流传感器、数字孪生第三电流传感器、数字孪生第四电流传感器;数字孪生温度传感器用于判断数字孪生发动机或数字孪生电动机过热或过冷的故障,数字孪生压力传感器用于判断数字孪生发动机液压系统故障,数字孪生第一电流传感器用于判断数字孪生发动机电流异常故障,数字孪生第二电流传感器用于判断数字孪生发电机电流异常故障,数字孪生第三电流传感器用于判断数字孪生动力电池组电流异常故障,数字孪生第四电流传感器用于判断数字孪生电动机电流异常故障;
59、42)构建最大后验概率估计值函数;
60、分别计算振动特征节点、动态性能特征节点和监测与报警信息节点的最大后验概率估计值,比较三个计算结果,选取最大值对应的故障类型作为诊断结果,具体包括:
61、振动特征节点z1、z2、z3的最大后验概率估计值计算表达式具体为:
62、
63、式中,表示振动特征节点最大后验概率估计值;g1,g2,g3分别表示数字孪生机身的结构松动故障、各数字孪生机翼电机故障、数字孪生发动机气缸故障;p(zi|gj)表示在给定故障gj发生的情况下,特征节点zi输入值发生的条件概率,i∈{1,2,3},j∈{1,2,3};π表示连乘;max为最大值函数;β1为正则化因子;
64、正则化因子β1的计算表达式具体为:
65、
66、式中,p(z1),p(z2),p(z3)分别表示振动特征节点z1输入值、z2输入值、z3输入值发生的概率;
67、动态性能特征节点d1、d2、d3的最大后验概率估计值计算表达式具体为:
68、
69、式中,表示动态性能特征节点最大后验概率估计值;g4,g5,g6分别表示数字孪生发动机故障、数字孪生升降舵故障和数字孪生机翼电机故障;p(di|gj)表示在给定故障gj发生的情况下,特征节点di输入值发生的条件概率,i∈{1,2,3},j∈{4,5,6};β2为正则化因子;
70、正则化因子β2的计算表达式具体为:
71、
72、式中,p(d1),p(d2),p(d3)分别表示动态性能特征节点d1输入值、d2输入值、d3输入值发生的概率;
73、监测与报警信息特征节点j1、j2、j3、j4、j5、j6的最大后验概率估计值计算表达式具体为:
74、
75、式中,表示监测与报警信息特征节点最大后验概率估计值;g7,g8,g9,g10,g11,g12分别表示数字孪生电动机过热或过冷的故障、数字孪生发动机液压系统故障、数字孪生发动机电流异常故障、数字孪生发电机电流异常故障、动力电池组电流异常故障和电动机电流异常故障;p(ji|gj)表示在给定故障gj发生的情况下,特征节点ji输入值发生的条件概率,i∈{1,2,3,4,5,6},j∈{7,8,9,10,11,12};β3为正则化因子;
76、正则化因子β3的计算表达式具体为:
77、
78、式中,p(j1),p(j2),p(j3),p(j4),p(j5),p(j6)分别表示监测与报警信息特征节点j1输入值、j2输入值、j3输入值、j4输入值、j5输入值、j6输入值发生的概率;
79、43)构建混合动力系统故障诊断的故障判别式;
80、根据所述步骤42)中的计算结果,定义混合动力系统故障诊断的故障判别式为:
81、
82、式中,g表示最大后验概率估计值所对应的故障类型。
83、进一步地,所述步骤42)中的条件概率和特征点输入值概率由先验概率构成初始值集合,先验概率数值基于无人机领域专家的经验和知识确立,在无人机混合动力系统故障诊断过程中所出现的故障数据输入云数据平台作为历史数据,并利用这些历史数据来完善先验概率,使故障诊断和故障预测更加准确。
84、进一步地,所述步骤5)中的概率信息为每一个特征节点的条件概率信息和特征点输入值时的概率。
85、本发明的有益效果:
86、本发明通过构建与无人机混合动力系统相对应的数字孪生混合动力系统,将混合动力系统的系统状态信息吉多传感器检测到的特征点信息经过计算匹配到数字孪生混合动力系统中,在无人机安全运行的所有周期内,物理实体系统和对应的数字孪生体系统的生命周期保持同步,有着相同的构成、相同的控制策略运行,便于了对无人机混合动力系统任意时刻的运行状态进行同步分析,及时诊断出无人机的运行情况,从而提高了无人机运作期间的安全性;
87、本发明通过构建故障判别式对无人机混合动力系统进行安全诊断,当无人机没有出现故障时,通过判别式定期对无人机混合动力系统进行故障预测,将最有可能先出现故障的位置判断出来并发出预警信息,方便故障维修人员进行安全排查,同时,当非致命故障出现而导致无人机无法正常运转时,通过数字孪生混合动力系统对无人机的最近运行数据进行分析,提供多个特征节点的输入值数据,并利用故障判别式判断出具体发生故障的位置,然后进行故障修复,通过数字孪生技术的应用极大提高了无人机混合动力系统故障预测能力和故障诊断精度,能够在短时间内通过安全的数字孪生端进行快速高效的故障预测及故障诊断。
88、本发明通过将故障诊断的历史数据存储与云数据平台,不断完善故障诊断数据库,使得无人机混合动力系统的故障预测精度和故障诊断的准确度不断提高,所使用的故障诊断方法具有良好的鲁棒性和自我学习能力。
- 还没有人留言评论。精彩留言会获得点赞!