一种三轴旋转台运动控制方法及其装置与流程
本发明属于机械控制,更具体地说,是涉及一种三轴旋转台运动控制方法及其装置。
背景技术:
1、随着航空航天技术和精密检测设备技术的发展,对旋转装置的角度偏转精度的要求越来越高。目前旋转装置采用电机控制,主要存在分辨率低、响应频率慢、体积大等问题;用常规的电机则很难达到要求,目前旋转装置大角度范围偏转与精密定位两者无法精确匹配,也很难实现智能化控制,很难在精密检测或精密加工或驱动中适用。
2、而现有的发明“一种精密定位和快速响应的旋转驱动装置及方法(公开号:cn113630035a)”具有以下特点:(1)通过对位移放大组件的形状和结构进行设计,将双压电陶瓷堆的直线微位移转换为角位移输出,实现了多倍数放大,极大提高了角度范围的精确定位;(2)采用压电陶瓷进行微作动,能够对旋转角度的微调节,且能频率响应快,实现了旋转过程中的高频偏摆运动和角度快速精确定位;(3)设计了末端反馈组件,通过齿轮副等传动机构放大末端旋转角度误差,测量输出角度后通过误差反馈控制驱动压电陶瓷和微电机组件,实现了宏微观以及末端补偿反馈的多重精度定位和变换;(4)对蜗轮蜗杆、放大组件和末端反馈组件等进行模块户组合,并设计装置主框架进行安装定位,实现了360°的角度旋转输出和纳米级精度定位,具备旋转自锁功能且输出扭矩大,结构紧凑简单、体积小,重量轻;(5)微电机系统驱动装置输出轴进行360°大角度偏转,放大组件将直线位移转化为角位移,带动装置输出轴进行微位移精确定位和高频偏摆运动,末端反馈组件对装置输出轴末端输出误差进行放大反馈,通过上述各机构的相互配合,实现了旋转驱动装置的大角度范围偏转、微位移的精确定位以及高频偏摆运动等功能。
3、此专利技术基本上停留在机械控制范围,没有实现系统软件的控制,缺乏智能化控制和网络化控制。
技术实现思路
1、为了解决现有技术上的不足之处,本发明的目的在于提供一种三轴旋转台运动控制方法及其装置,通过设置霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块,可以精准的旋转x轴、y轴、z轴,并自动检测x轴、y轴、z轴的旋转角度,保证旋转的角度与目标角度的完全一致,没有任何误差,实现智能化、网络化的精准旋转运动。
2、为了实现上述目的,本发明采取的技术方案是:
3、一种三轴旋转台运动的控制方法,包括以下步骤:
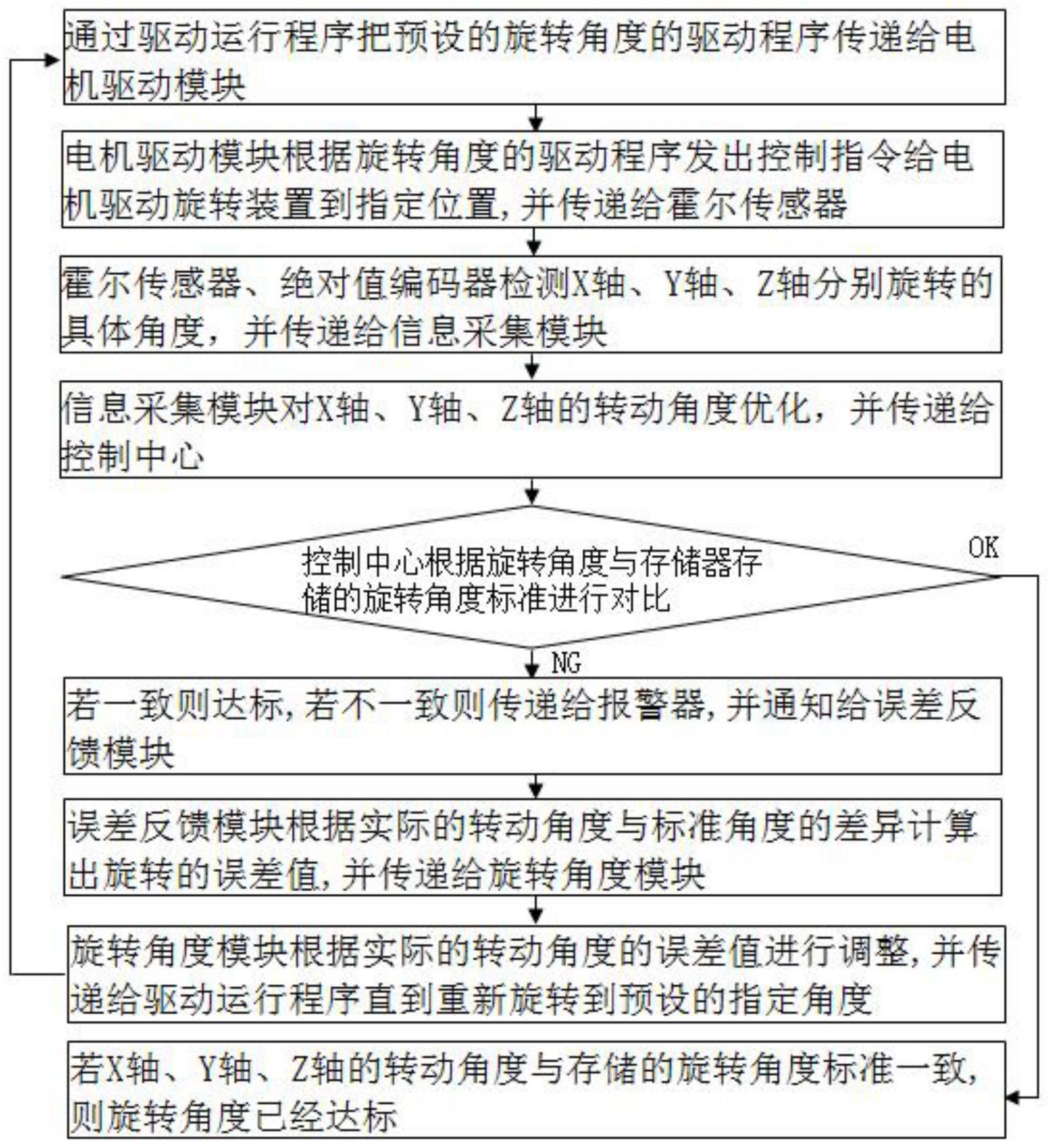
4、s10、通过驱动运行程序把预设的旋转角度的驱动程序传递给电机驱动模块;
5、s20、电机驱动模块根据旋转角度的驱动程序发出控制指令给电机驱动旋转装置到指定位置,并传递给霍尔传感器、绝对值编码器;
6、s30、霍尔传感器、绝对值编码器检测x轴、y轴、z轴分别旋转的具体角度,并传递给信息采集模块;
7、s40、信息采集模块对x轴、y轴、z轴的转动角度优化,并传递给控制中心;
8、s50、控制中心根据x轴、y轴、z轴的转动角度与存储器存储的旋转角度标准进行对比:若一致则达标,若不一致则传递给报警器,并通知给误差反馈模块;
9、s60、误差反馈模块根据实际的转动角度与标准角度的差异计算出旋转的误差值,并传递给旋转角度模块;
10、s70、旋转角度模块根据实际的转动角度的误差值进行调整,并传递给驱动运行程序直到重新旋转到指定角度。
11、进一步,所述步骤s20,包括以下步骤:
12、s21、通过集成芯片对该装置的马达分别带动x驱动机构、y驱动机构、z驱动机构中的驱动件驱动蜗轮件做旋转运动;
13、s22、通过霍尔传感器、绝对值编码器分别对x驱动机构、y驱动机构、z驱动机构的位置移动自动检测出旋转角度。
14、本发明提供的一种三轴旋转台运动的控制方法,还包括一种三轴旋转台运动的控制系统,包括:霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块、无线通信模块、报警器、存储器、控制中心、智能手机;所述霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块、无线通信模块、报警器、存储器分别通过控制中心相连;
15、所述智能手机在物联网或互联网的范围内通过物联网或互联网与无线通信模块自动组网相连;
16、所述报警器根据旋转的实际角度与存储的标准角度不一致时,则自动发出声音报警,并传递给误差反馈模块;
17、所述存储器负责霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块的信息存储,以及x轴、y轴、z轴的转动目标角度的存储;
18、所述无线通信模块设置有物联网模块,在物联网或互联网范围内可以自动组网,并与智能手机无线网络连接,负责收发无线网络信号;
19、所述信息采集模块负责把x轴、y轴、z轴的转动角度进行数据处理和优化后,并传递给控制中心;
20、所述误差反馈模块根据实际的转动角度与标准角度的差异计算出旋转的误差值,并传递给旋转角度模块;
21、所述电机驱动模块根据旋转角度的驱动程序发出控制指令给电机驱动旋转装置,并传递给霍尔传感器、绝对值编码器;
22、所述控制中心负责霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块的信息传递,为系统枢纽中心,根据转动轴与摆臂的转动角度与存储器存储的旋转角度标准进行对比:若一致则达标,若不一致则传递给报警器,并通知给误差反馈模块。
23、进一步,所述驱动运行程序负责预设的旋转角度的驱动程序设计、优化,并传递给电机驱动模块。
24、进一步,所述霍尔传感器、绝对值编码器负责分别检测x轴、y轴、z轴旋转的具体角度,并传递给信息采集模块。
25、进一步,所述旋转角度模块根据实际的转动角度的误差值进行调整,并传递给驱动运行程序。
26、本发明还提供一种三轴旋转台运动装置,由以上所述一种三轴旋转台运动方法所实现。
27、进一步,本发明提供的一种三轴旋转台运动装置,包括:集成芯片、三个霍尔传感器、三个绝对值编码器、x驱动机构、y驱动机构、z驱动机构、机架;所述集成芯片包括信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块、无线通信模块、报警器、存储器、控制中心;所述三个霍尔传感器、三个绝对值编码器分别设置在x驱动机构、y驱动机构、z驱动机构上的合适位置;所述x驱动机构、y驱动机构、z驱动机构呈三维角度分布,其结构均相同,均包括驱动件、蜗轮件。
28、进一步,本发明提供的一种三轴旋转台运动装置,还包括计算机设备、计算机可读存储介质;所述计算机设备包括存储器和各功能模块,所述存储器存储有计算机程序,所述各功能模块执行所述计算机程序时实现以上任意一项所述的一种三轴旋转台运动方法的步骤;所述计算机可读存储介质上存储有计算机程序,所述计算机程序被各功能模块执行时实现以上任意一项所述的一种三轴旋转台运动方法的步骤。
29、本发明与现有技术相比的有益效果:
30、通过设置霍尔传感器、绝对值编码器、信息采集模块、旋转角度模块、驱动运行程序、电机驱动模块、误差反馈模块,可以精准的旋转x轴、y轴、z轴,并自动检测x轴、y轴、z轴的旋转角度,保证旋转的角度与目标角度的完全一致,没有任何误差,实现智能化的精准旋转运动;并设置无线通信模块,可以实现无线网络控制或监控。
- 还没有人留言评论。精彩留言会获得点赞!