基于事件触发的四旋翼无人机指定时间预定性能控制方法
本发明涉及控制系统,具体涉及一种基于事件触发的四旋翼无人机指定时间预定性能控制方法。
背景技术:
1、四旋翼无人机具有结构简单,操控灵活等特点,是一种具有垂直飞行、悬停、直径小等特点的小型无人机。四旋翼无人机在智慧交通、城市消防、农业领域和军事领域都有着广泛的应用。因此,四旋翼无人机的研究具有很重要的现实意义。
2、然而,四旋翼无人机是一个典型的欠驱动、强耦合的非线性系统,在实际飞行过程中容易受到外界干扰和本身模型参数的不确定性等因素的影响,使得其飞行控制系统设计面临较大的挑战性。因此,对于四旋翼无人机的飞行控制研究受到了国内外研究者的广泛关注。
3、虽然现有控制策略已经可以使四旋翼飞行器达到平稳飞行,但是大多都是基于传统的时间触发控制策略,它需要以保守的频率传输信息并不断更新控制信号,这无疑会导致系统通信资源的浪费。为了解决这一问题,减少资源浪费,事件触发控制策略被提出,事件触发控制允许较低的采样频率,同时确保良好的系统性能。
4、然而,现有研究大多只考虑了渐近稳定问题,并且取得了很好的控制效果,但是系统的暂稳态性能也同样重要,为了能够使系统的稳态性能和暂态性能同时满足预先设定的性能指标,bechlioulis等提出了预定性能控制方法用于约束系统的暂稳态性能。
5、因此,研究未知系统参数和未知外部扰动,并且在事件触发下的四旋翼无人机的预定性能控制,并考虑在指定时间内使得系统达到预先设定的暂稳态性能具有重要的现实意义和价值。
技术实现思路
1、本发明的目的是提供一种基于事件触发的四旋翼无人机指定时间预定性能控制方法,使得具有未知系统参数和未知的外部扰动的四旋翼无人机在事件触发的条件下,能在指定时间内收敛,并且达到预先设定好的暂稳态性能,使得系统同时满足了暂态性能和稳态性能约束。
2、本发明采用如下技术方案:
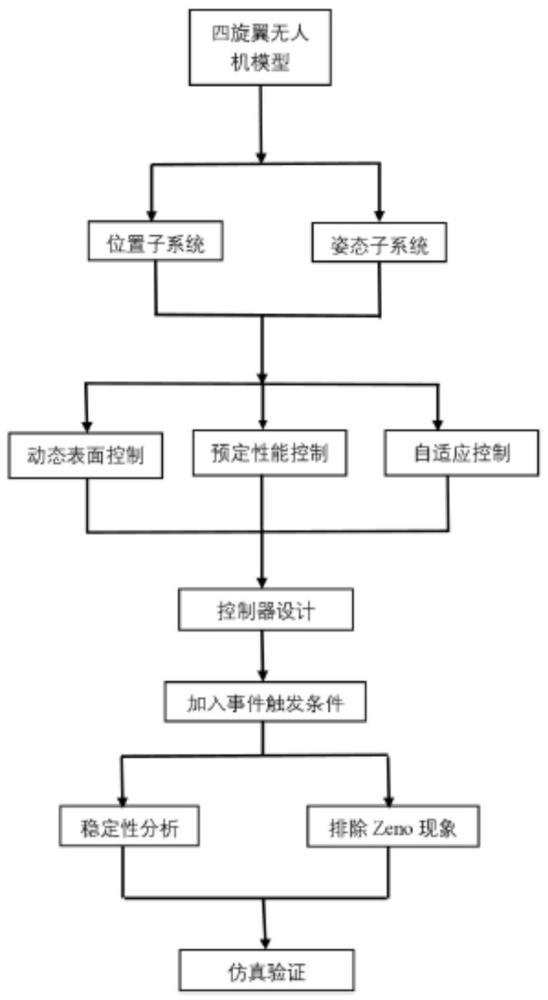
3、一种基于事件触发的四旋翼无人机的指定时间预定性能控制方法,通过固定阈值触发策略和动态表面控制,设计位置环控制器和姿态环控制器,通过自适应控制方法对未知系统参数和未知的外部扰动进行估计;引入一个指定时间预定性能函数和坐标变换使得系统在指定时间内收敛,并且使得系统跟踪误差同时满足暂态和稳态性能约束。
4、优选的,选取一个正递减光滑性能函数
5、
6、其中,调节参数l,n,ξ∞,te均是正常数,t0表示时间的初始值,te表示指定的时间;设计目标为跟踪误差ei,i=1,3,5,7,9,11的轨迹满足-d2fbi<ei<d1fbi,i=1,3,5,7,9,11,其中d1和d2均为正常数,-d2fbi和d1fbi分别为满足条件的下界和上界;选择调节参数n,ξ0,ξ∞,d1和d2,即可设定需要的预定性能约束;为了使跟踪
7、误差满足预定性能的约束,对跟踪误差进行如下坐标变换:
8、
9、其中,ei是跟踪误差;
10、对坐标变换求导可以得到下式:
11、
12、其中,是跟踪误差的导数,
13、
14、上述所有的i=1,3,5,7,9,11。
15、优选的,所述位置环控制器包括位置x子系统[x1,x2]t控制器、位置y子系统[x3,x4]t控制器和位置z子系统[x5,x6]t控制器;
16、所述指定时间指定的是收敛时间,自己指定一个时间,让系统在所指定的这个时间内收敛,不受初始状态影响,随意指定。
17、优选的,所述位置x子系统[x1,x2]t控制器为:
18、
19、
20、其中,ωx(t)表示控制器,c2>0,ε1>0,υ1>0,是设计参数;e2是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmx的下边界值,|τmxdx|≤dx,dx是外部干扰,dx是其边界值,是dx的估计值;
21、位置x子系统[x1,x2]t的自适应率为:
22、
23、
24、其中,是的导数,是的导数;r1>0,r2>0,δ1>0,δ2>0是设计参数;固定阈值事件触发策略如下:
25、触发条件被定义为
26、
27、tk+1=inf{t∈r||ζx(t)|≥βx},t1=0
28、其中,ξx(t)是测量误差,被定义为ξx(t)=ωx(t)-ux(t),和βx>0为设计参数,并且ux(t)是事件触发条件下的控制器,ωx(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为ux(tk+1)。优选的,所述位置y子系统[x3,x4]t控制器为:
29、
30、
31、其中,ωy(t)表示控制器,c4>0,ε3>0,υ3>0,和βy>0是设计参数,e4是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmy的下边界值,|τmydy|≤dy,dy是外部干扰,dy是其边界值,是dy的估计值;
32、位置y子系统[x3,x4]t的自适应率为:
33、
34、
35、其中,是的导数,是的导数;r3>0,r4>0,δ3>0,δ4>0是设计参数;
36、固定阈值事件触发策略如下:
37、触发条件被定义为
38、
39、tk+1=inf{t∈r||ζy(t)|≥βy},t1=0
40、其中,ζy(t)是测量误差,被定义为ζy(t)=ωy(t)-uy(t),为设计参数,并且uy(t)是事件触发条件下的控制器,ωy(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为uy(tk+1)。
41、优选的,所述位置z子系统[x5,x6]t控制器为:
42、
43、
44、其中,ωz(t)表示控制器,c6>0,ε5>0,υ5>0,是设计参数;e6是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmz的下边界值,|τmzdz|≤dz,dz是外部干扰,dz是其边界值,是dz的估计值;
45、位置z子系统[x5,x6]t的自适应率为:
46、
47、
48、其中,是的导数,是的导数;r5>0,r6>0,δ5>0,δ6>0是设计参数;
49、固定阈值事件触发策略如下:
50、触发条件被定义为
51、
52、tk+1=inf{t∈r||ζz(t)|≥βz},t1=0
53、其中,ζz(t)是测量误差,被定义为ζz(t)=ωz(t)-uz(t),和βz>0为设计参数,并且uz(t)是事件触发条件下的控制器,ωz(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为uz(tk+1)。优选的,所述姿态环控制器包括横滚子系统[x7,x8]t控制器、俯仰子系统[x9,x10]t控制器和偏航子系统[x11,x12]t控制器。
54、优选的,所述横滚子系统[x7,x8]t控制器为:
55、
56、
57、其中,ωφ(t)表示控制器,c8>0,ε7>0,υ7>0,是设计参数;e8是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmφ的下边界值,dφ是外部干扰,tmφ是系统未知参数,是其上边界值,是的估计值;
58、横滚角子系统[x7,x8]t的自适应率为:
59、
60、
61、其中,是的导数,是的导数;r7>0,r8>0,δ7>0,δ8>0,是设计参数;
62、固定阈值事件触发策略如下:
63、触发条件被定义为
64、
65、tk+1=inf{t∈r||ζφ(t)|≥βφ},t1=0
66、其中,ζφ(t)是测量误差,被定义为ζφ(t)=ωφ(t)-uφ(t),和βφ>0为设计参数,并且uφ(t)是事件触发条件下的控制器,ωφ(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为uφ(tk+1)。优选的,所述俯仰子系统[x9,x10]t控制器为:
67、
68、
69、其中,ωθ(t)表示控制器,c10>0,ε9>0,υ9>0,是设计参数;e10是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmθ的下边界值,dθ是外部干扰,tmθ是系统未知参数,是其上边界值,是的估计值;
70、俯仰子系统[x9,x10]t的自适应率为:
71、
72、
73、其中,是的导数,是的导数;r9>0,r10>0,δ9>0,δ10>0,是设计参数;
74、固定阈值事件触发策略如下:
75、触发条件被定义为
76、
77、tk+1=inf{t∈r||ζθ(t)|≥βθ},t1=0
78、其中,ζθ(t)是测量误差,被定义为ζθ(t)=ωθ(t)-uθ(t),和βθ>0为设计参数,并且uθ(t)是事件触发条件下的控制器,ωθ(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为uθ(tk+1)。优选的,所述偏航子系统[x11,x12]t控制器为:
79、
80、
81、其中,ωψ(t)表示控制器,c12>0,ε11>0,υ11>0,是设计参数;e12是跟踪误差;是理想控制输入的导数,是的估计值,是系统未知参数τmψ的下边界值,dψ是外部干扰,tmψ是系统未知参数,是其上边界值,是的估计值;
82、偏航子系统[x11,x12]t的自适应率为:
83、
84、
85、其中,是的导数,是的导数;r11>0,r12>0,δ11>0,δ12>0是设计参数;
86、固定阈值事件触发策略如下:
87、触发条件被定义为
88、
89、tk+1=inf{t∈r||ζψ(t)|≥βψ},t1=0
90、其中,ζψ(t)是测量误差,被定义为ζψ(t)=ωψ(t)-uψ(t),和βψ>0为设计参数,并且uψ(t)是事件触发条件下的控制器,ωψ(tk)是tk时刻的控制器;tk是控制器更新时间,当被触发时,时间将被标记为tk+1,并且控制器将被更新为uψ(tk+1)。
91、本发明的有益效果在于:
92、目前,在考虑事件触发条件的情况下,四旋翼无人机的轨迹跟踪控制问题已有部分研究,但是,既考虑事件触发,又考虑未知系统参数、未知外部扰动、指定时间内的暂稳态性能约束的方案还没有出现,本发明通过采用动态表面控制方法和自适应控制方法,构造出了预定性能控制器,从而解决了事件触发、未知系统参数、未知外部扰动的四旋翼无人机的轨迹跟踪预定性能控制问题。
93、本发明引入了一个光滑的递减的正函数和一个新的坐标变换,结合动态表面控制,使得系统在指定时间内收敛,系统跟踪误差可以在指定的时间内达到预先设定的暂稳态性能,提高了稳定性,采用事件触发机制有效避免了资源浪费。
- 还没有人留言评论。精彩留言会获得点赞!