基于滑模控制的张拉整体无人机滚动控制方法
本发明涉及机器人控制,具体涉及一种基于滑模控制的张拉整体无人机滚动控制方法。
背景技术:
1、张拉整体无人机是一种将六杆张拉整体结构与四旋翼无人机融合的新型无人机结构,相比于其他类型的抗冲击无人机,张拉整体无人机在拥有抗冲击能力的同时,还具有其他抗冲击无人机所不能实现的地面稳定可控滚动的能力。优越的抗冲击能力以及兼具飞行和滚动的多模态运动能力使张拉整体无人机比一般无人机具有更高的安全性和更广阔的应用场景,在地势复杂、环境未知的场景下,张拉整体无人机有更多的运动选择、更好的运动能力,更能满足使用者多样的任务需求。
2、在地面上,六杆张拉整体结构的二十个三角形面均可作为张拉整体无人机的着地面,且张拉整体无人机地面滚动运动的本质就是不同着地面之间的切换。然而地面滚动时推力方向与无人机姿态高度耦合,难以实现对张拉整体无人机滚动运动的实时精准控制。
3、因此,设计一种对张拉整体无人机滚动运动的实时精准控制的方法是非常重要的。
技术实现思路
1、有鉴于此,本发明提供了基于滑模控制的张拉整体无人机滚动控制方法,实现对张拉整体无人机滚动运动的实时精准控制。
2、为达到上述目的,本发明的技术方案的具体步骤包括:
3、建立张拉整体无人机动力学模型。
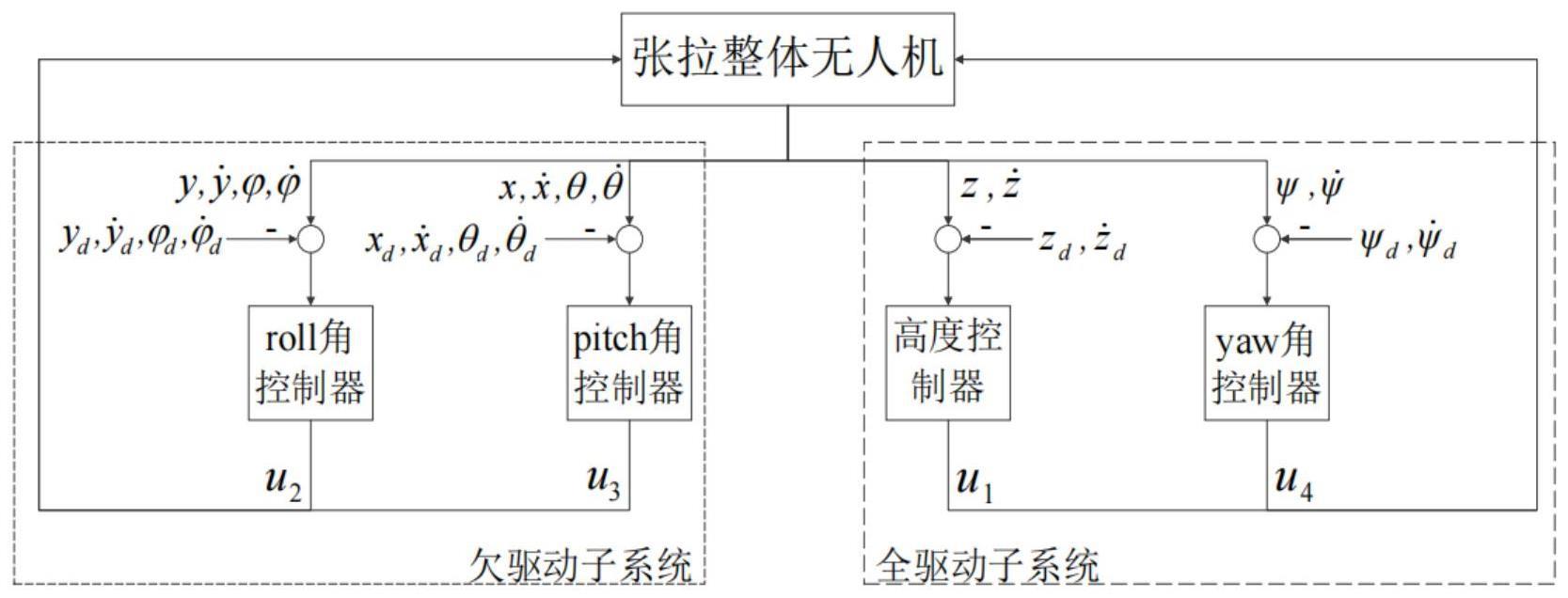
4、根据张拉整体无人机结构中刚性压杆与中心无人机的物理连接关系将系统广义坐标划分成间接受驱和直接受驱的广义坐标,并将直接受驱的广义坐标项分成两个子系统:欠驱动子系统和全驱动子系统。
5、分别针对欠驱子系统和直接受驱的全驱子系统,利用滑模控制设计滑模面。
6、对于滑模面设计对应的滑模趋近律得到张拉整体无人机的控制输入,通过上述控制输入,实现对张拉整体无人机的滚动控制。
7、进一步地,张拉整体无人机为六杆张拉整体无人机,六杆张拉整体无人机的整体框架包括:6根刚性压杆、24根弹性索以及放置于六杆张拉整体结构中心位置处的四旋翼无人机;无人机与两根互相平行的刚性压杆相连,六杆张拉整体结构中的另外四根杆通过弹性索构件与无人机柔性连接。
8、进一步地,建立张拉整体无人机动力学模型,具体包括如下步骤:
9、根据拉格朗日方程,建立六杆张拉整体无人机在外力作用下广义坐标对应的动力学模型为:
10、
11、其中,表示六杆张拉整体无人机系统的广义坐标,包括未与中心四旋翼无人机直接相连的四根刚性压杆的杆端节点的空间位置、中心无人机的空间位置及姿态,分别表示六杆张拉整体无人机系统的速度和加速度,m(q)表示六杆张拉整体无人机系统的质量矩阵,表示弹性索拉力、重力及碰撞接触力矩阵,表示系统的约束矩阵,bau表示系统所受的螺旋桨推力;
12、则系统的加速度表达式为:
13、
14、其中λ为拉格朗日乘子。
15、进一步地,根据张拉整体无人机结构中刚性压杆与中心无人机的物理连接关系将系统广义坐标划分成间接受驱和直接受驱的广义坐标,并将直接受驱的广义坐标项分成两个子系统:欠驱动子系统和全驱动子系统;
16、具体包括如下步骤:
17、在六杆张拉整体无人机中,无人机螺旋桨转动产生的推力直接作用于无人机及直接与无人机连接的刚性压杆;
18、将无人机的广义坐标视为直接受驱的广义坐标,将不直接与无人机相连、受系统弹性索内力间接驱动的杆端节点对应的广义坐标视为间接受驱的广义坐标,并且以直接受驱的广义坐标项为研究对象;
19、以向量ξ=[x y z]t表示中心四旋翼无人机在世界坐标系中的位置,表示中心四旋翼无人机在世界坐标系中的姿态角,其中,θ,ψ分别表示滚动角、俯仰角和偏航角;
20、根据螺旋桨推力与广义坐标之间的关系,将直接受驱的广义坐标项分成两个子系统:欠驱动子系统和全驱动子系统,欠驱动子系统对应的广义坐标包括x,θ,y,全驱动子系统对应的广义坐标包括z,ψ。
21、进一步地,分别针对欠驱子系统和直接受驱的全驱子系统,利用滑模控制设计滑模面,具体为:
22、对于直接受驱的全驱子系统,利用滑模控制设计两个滑模面,分别为第一滑模面s1和第二滑模面s2,其中第一滑模面s1为中心四旋翼无人机的高度相关滑滑模控制面,第二滑模面s2为中心四旋翼无人机的偏航角相关滑模控制面,二者分别为:
23、
24、
25、其中,zd,ψd分别为中心四旋翼无人机的期望高度和期望偏航角,分别为zd,ψd的一阶导数;分别为z,ψ的一阶导数;cz1,cz2,cψ1,为滑模面参数,cz1为第一滑模面中关于中心四旋翼无人机的位置高度的系数,cz2为第一滑模面中关于中心四旋翼无人机的位置高度的一阶导数的系数,cψ1为第二滑模面中关于中心四旋翼无人机的偏航角的系数,cψ2为第二滑模面中关于中心四旋翼无人机的偏航角的一阶导数的系数;
26、对于直接受驱的欠驱子系统,利用滑模控制设计两个滑模面,分别为第三滑模面s3和第四滑模面s4:其中第三滑模面s3为中心四旋翼无人机的x轴坐标与俯仰角结合的滑模控制面,第四滑模面s4为中心四旋翼无人机的y轴坐标与滚动角结合的滑模控制面,二者分别为:
27、
28、
29、其中,xd,yd为中心四旋翼无人机的期望x坐标和期望y坐标,θd,分别为中心四旋翼无人机的期望俯仰角和期望滚动角,分别为xd,yd,θd,的一阶导数;x,y分别为中心四旋翼无人机的x坐标和y坐标;分别为x,y的一阶导数;分别为θ的一阶导数;cx1,cx2,cy1,cy2,cθ1,cθ2,为相应的滑模面参数,其中cx2为关于中心四旋翼无人机的位置x坐标的系数,cx1为关于中心四旋翼无人机的位置x坐标的一阶导数的系数,cy2为关于中心四旋翼无人机的位置y坐标的系数,cy1为关于中心四旋翼无人机的位置y坐标的一阶导数的系数,cθ1为关于中心四旋翼无人机的俯仰角的一阶导数的系数,cθ2为关于中心四旋翼无人机的俯仰角的系数,为关于中心四旋翼无人机的滚动角的一阶导数的系数,为关于中心四旋翼无人机的滚动角的系数。
30、进一步地,对于滑模面设计对应的滑模趋近律得到张拉整体无人机的控制输入,具体为:
31、对于第一~第四滑模面s1,s2,s3,s4,分别设计对应的滑模趋近律且ζi,分别为滑膜趋近律的符号函数系数和滑模面系数,设置ζi>0,,i取值为1,2,3,4时分别对应第一~第四滑模面的滑膜趋近律;
32、得到分别对应第一~第四滑模面的控制输入u1、u4、u3和u2:
33、
34、
35、
36、
37、将中心四旋翼无人机及与其连接的两根刚性压杆视为一个整体a,其中mdb为a的质量;diag[ixx iyy izz]为a相对于机体坐标系的惯量矩阵,ixx,iyy,izz分别为a对于中心四旋翼无人机的机体坐标系的x,y,z轴的惯量;为对应参数*的二阶导数;式表示在矩阵中的第i+24行元素。
38、有益效果:
39、1、本发明设计了一种基于滑模控制的张拉整体无人机滚动控制方法,本方法将滑膜控制引入张拉整体无人机这类耦合度高的机械系统,通过设计滑模面得到张拉整体无人机的滚动控制器,实现对张拉整体无人机地面滚动运动的精准控制;
40、2、本发明将张拉整体无人机的滚动控制问题转化为欠驱动系统的位置、姿态跟踪问题,分别针对全驱动子系统和欠驱动子系统进行滑模控制器设计,提供了控制系统可实现性,有效求解出张拉整体无人机的地面滚动策略。
- 还没有人留言评论。精彩留言会获得点赞!