基于前提不完全匹配的多项式模糊控制器设计解凸方法
本发明涉及正系统控制器,尤其涉及一种基于前提不完全匹配的多项式模糊控制器设计解凸方法。
背景技术:
1、在生活生产的各个领域中存在着一类系统状态与输出始终保持为非负的特殊系统,这类系统称为正系统。在实际生活中正系统通常为带有非线性特性的非线性正系统。针对非线性性质,学者们通过多项式模糊建模方法将非线性正系统建模为多项式模糊正系统。目前针对多项式模糊正系统的研究仍处于起步阶段,研究成果只涉及到个别问题,仍有大量亟待解决的问题需要学者们展开研究。
2、在研究多项式模糊正系统的控制问题时,其核心的研究工作是控制器设计。多项式模糊控制器由前提隶属度函数和子多项式控制器组成。从多项式模糊控制器的组成结构角度考虑控制器的设计问题,目前有两种设计概念,第一种设计概念是并行分布补偿设计概念,该设计概念下设计的模糊控制器与模糊系统共用一套前提隶属度函数,这种设计概念不利于提高控制器的设计灵活度、提高闭环系统的鲁棒性能及降低控制器的实施成本。另一种设计概念是前提不匹配控制器设计概念,该设计概念允许模糊控制器和模糊系统各有一套属于自己的前提隶属度函数,这有助于设计更易于实施的控制器,从而降低控制器的实施成本,而且打破模糊控制器前提隶属度函数和系统前提隶属度函数的精确一致性也有助于增加闭环系统的鲁棒性。但由于前提不匹配设计框架下的闭环控制系统失去了模糊系统与模糊控制器的对称结构,所以会导致难以解决的非凸问题。
3、李雅普诺夫稳定性理论经常被用于多项式模糊正系统的稳定分析中,受正限制的影响,传统的对角二次李雅普诺夫函数函数应用于正系统必须退化为对角二次李雅普诺夫函数。这降低了李雅普诺夫变量设计的灵活性,增加了保守性。另一种适用于正系统的李雅普诺夫函数为线性余正李雅普诺夫函数,它虽然降低了保守性,但会导致出现非凸条件。尤其当为了提高控制器的设计灵活性而采用前提不完全匹配的模糊控制器时,非凸条件将更加难以处理。综上,当前缺乏一种有效的解凸方法,以解决当线性余正李雅普诺夫函数应用于分析多项式模糊正系统稳定性并且采用前提不完全匹配概念设计多项式模糊控制器时产生的非凸问题。
技术实现思路
1、针对现有技术的不足,本发明提供一种基于前提不完全匹配的多项式模糊控制器设计解凸方法,该方法借鉴控制器增益分解的思想,将以隶属度函数为加权系数的输入矩阵的加和引入到分解式的分母中。然后用扇形非线性方法和切比雪夫隶属度函数依赖方法处理稳定条件中带有隶属度函数的非凸项。
2、一种基于前提不完全匹配的多项式模糊控制器设计解凸方法,包括以下步骤:
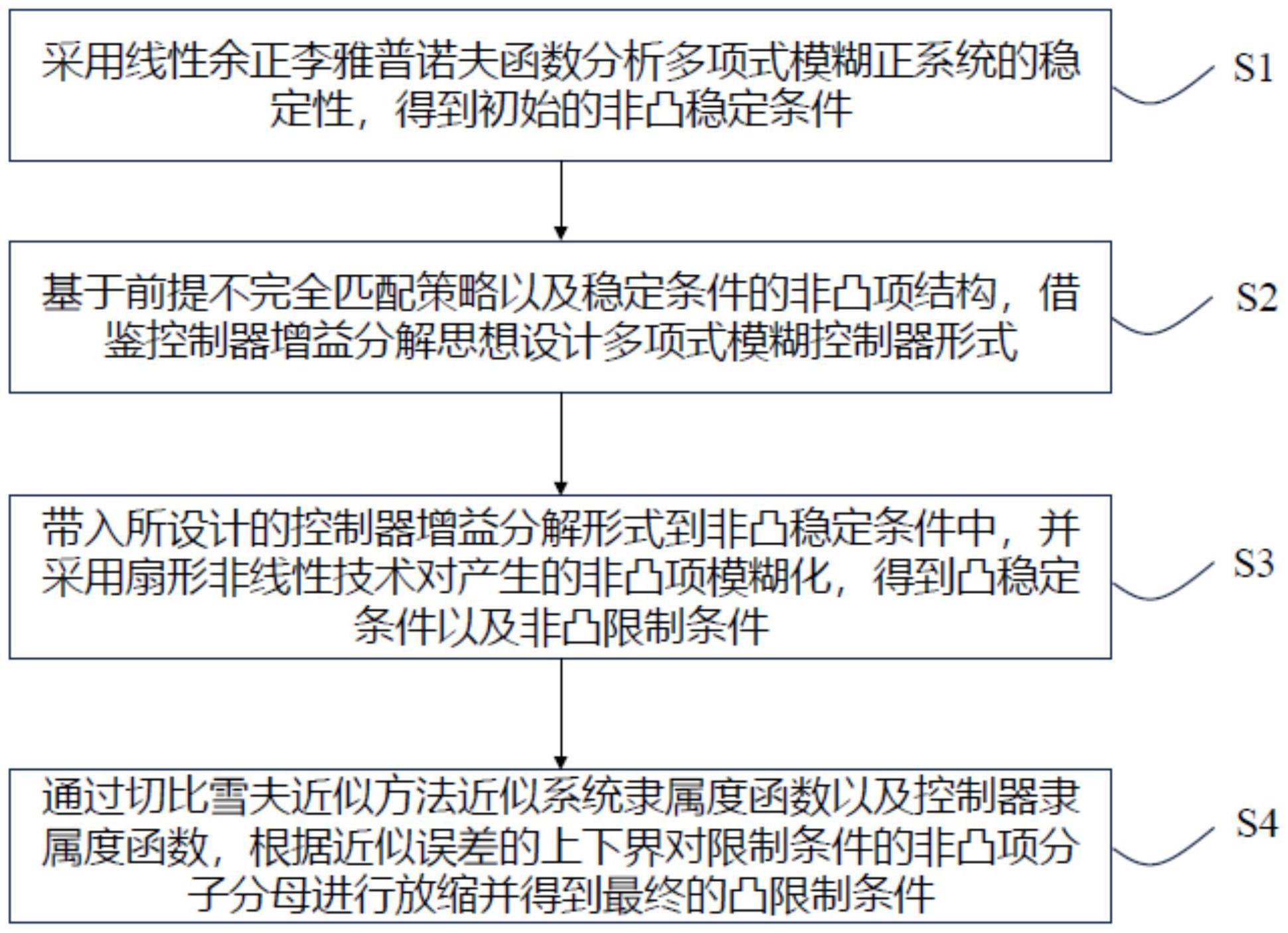
3、步骤1:采用线性余正李雅普诺夫函数分析多项式模糊正系统的稳定性,得到初始的非凸稳定条件;
4、步骤1.1:通过多项式模糊建模方法把非线性正系统建模为p个模糊规则的多项式模糊正系统;
5、所述多项式模糊正系统如下式所示:
6、
7、其中wi(x(t))是系统隶属度函数,且分别是系统状态向量和控制输入向量;分别是已知的多项式系统矩阵与输入矩阵,表示实数域上t×s维矩阵;
8、步骤1.2:依据前提不完全匹配概念,为多项式模糊正系统设计一个具有p条规则的多项式模糊控制器;
9、所述多项式模糊控制器如下式所示:
10、
11、其中u(t)为系统的控制输入,mj(x(t))是控制器隶属度函数,且为待设计的多项式模糊控制器;
12、步骤1.3:结合步骤1.1的多项式模糊正系统以及步骤1.2的多项式模糊控制器得到闭环控制系统,省略时间符号t:
13、
14、步骤1.4:进行闭环控制系统稳定性分析所使用的线性余正李雅普诺夫函数为其中λ为每个元素都为正的李雅普诺夫函数变量;由于系统为正系统,v(x)≥0;
15、系统稳定需保证线性余正李雅普诺夫函数对时间的导数小于0,即:
16、
17、其中λtbi(x)gj(x)为待处理的非凸项,故式(4)为非凸稳定条件;
18、步骤2:基于前提不完全匹配策略以及稳定条件下的非凸项,根据控制器增益分解思想设计多项式模糊控制器增益分解的形式;
19、根据前提不完全匹配策略,控制器采用与系统隶属度函数完全不一样的隶属度函数mj(x),为处理非凸项λtbi(x)gj(x),将多项式模糊控制器gj(x)设计为:
20、
21、式(5)的等式右边为所设计的控制器增益分解形式;其中是待决策变量矩阵;是除第ι个元素为1,其余元素为0的m维列向量;为元素全为1的m维列向量。
22、步骤3:带入步骤2所设计的控制器增益分解形式到非凸稳定条件中,并采用扇形非线性技术对产生的非凸项模糊化,得到凸稳定条件(9)(10)以及非凸限制条件(11);
23、步骤3.1:假设存在多项式变量使得m表示集合{1,2,…,m};根据线性余正李雅普诺夫函数的时间导数进行如下推导:
24、
25、式中为元素全为1的列向量;
26、步骤3.2:根据扇形非线性技术,步骤3.1式(6)中的非凸项表示为:
27、
28、其中fmin和fmax分别是f(x)在预先设定的x的操作域中的最小值和最大值;在使用扇形非线性技术后,李雅普诺夫函数的时间导数推导如下:
29、
30、式中f1=fmin,f2=fmax;
31、由于正系统的系统状态x非负,并且需保证以下三个条件成立:
32、
33、
34、
35、式中式(9)(10)为凸稳定条件,式(11)为非凸限制条件;
36、步骤4:通过切比雪夫近似方法近似系统隶属度函数以及控制器隶属度函数,根据近似误差的上下界对限制条件的非凸项分子分母进行放缩并得到最终的凸限制条件;
37、步骤4.1:采用remez算法将系统隶属度函数与控制器隶属度函数进行分段切比雪夫多项式近似为如下近似隶属度函数:
38、
39、其中是近似的系统隶属度函数,所示近似的控制器隶属度函数;σ是整个状态空间ψ被分割为相互连接的子状态空间的个数,为状态标志变量,当和是依赖x的多项式;和为对应多项式的系数;定义子空间中与分别为与的近似误差;并且的最大与最小边界分别定义为与的最大与最小边界分别定义为与
40、步骤4.2:定义假设存在决策变量y1i(x)与y2i(x)有:
41、
42、则对进行不等式放缩,获得下述条件:
43、
44、
45、其中表示系统隶属度函数经过remez算法获得的最佳分段切比雪夫近似函数;
46、定义θs(x)=λtbs(x)em;假设存在决策变量y3s(x)与y4s(x)有:
47、
48、则对进行不等式放缩,获得下述条件:
49、
50、
51、其中表示控制器隶属度函数经过remez算法获得的最佳分段切比雪夫近似函数;经过不等式放缩后有以下不等式成立:
52、
53、则条件由下式保证:
54、
55、为了进一步减少保守性,根据s-procedure将系统变量的边界信息引入到式(20)中,如果存在正标量与使下列条件成立:
56、
57、其中与分别是系统状态在子状态空间中的最大值与最小值,是隶属度函数所依赖的状态变量的数量;条件(21)的保守性要比条件(20)的保守性进一步减小。式(21)即为最终的凸限制条件
58、采用上述技术方案所产生的有益效果在于:
59、本发明提供一种基于前提不完全匹配的多项式模糊控制器设计解凸方法,设计了一个前提不完全匹配的模糊控制器对多项式模糊正系统进行状态反馈闭环控制。由于前提不匹配的模糊控制器的前提隶属度函数与模糊系统的前提隶属度函数不必相同,所以提高了控制器的设计灵活度,降低了控制器的实施成本。另外,基于线性余正李雅普诺夫函数对闭环控制系统进行稳定性分析,并借助扇形非线性方法和分段切比雪夫隶属度函数依赖方法对出现在稳定条件中的非凸项进行凸化处理,获得了保守性较低的凸稳定条件。
- 还没有人留言评论。精彩留言会获得点赞!