一种基于LSTM神经网络的船舶路径动态规划方法与流程
本发明涉及船舶路径动态规划,具体涉及一种基于lstm神经网络的船舶路径动态规划方法。
背景技术:
1、海洋运输是连接海上经济的毛细血管,为了满足日益增长的运输需求,船舶数量也不可避免的随之增长,同样面积的海域需容纳更多船舶,这使得船舶碰撞事故更加频发,发生船舶碰撞事故会造成打乱航行计划、拥堵水域交通、危及海员生命、造成财产损失等严重负面影响,船舶的避碰路径规划系统可以提供安全可靠的航行路线作为参考,减少海员的驾驶负担和人为判断失误,也可用于规划无人船只的自主航行路径。
2、目前的船舶路径动态规划系统主要存在以下三个问题:
3、第一、现有算法在对航海环境进行规划时,对航行环境的各个区域表述不清晰,造成解算时间复杂度过高,导致船舶在栅格化后航行受限制;
4、第二、现有蚁群算法在解决船舶航行路线时,需对所有路径连接节点权值进行运算比较,随着节点数量的增加,导致计算时间复杂度大幅增加,精确求解速度慢;
5、第三、现有船舶路径规划模型,在规划动态目标之间的航线时安全性较差,且整条路径转艏次数较多,航线路径平滑度偏低。
技术实现思路
1、本发明的目的在于提供一种基于lstm神经网络的船舶路径动态规划方法,以解决现有技术中现有算法模型解算复杂、精度求解速度慢以及航线路径平滑度偏低的技术问题。
2、为解决上述技术问题,本发明具体提供下述技术方案:
3、一种基于lstm神经网络的船舶路径动态规划方法,包括以下步骤:
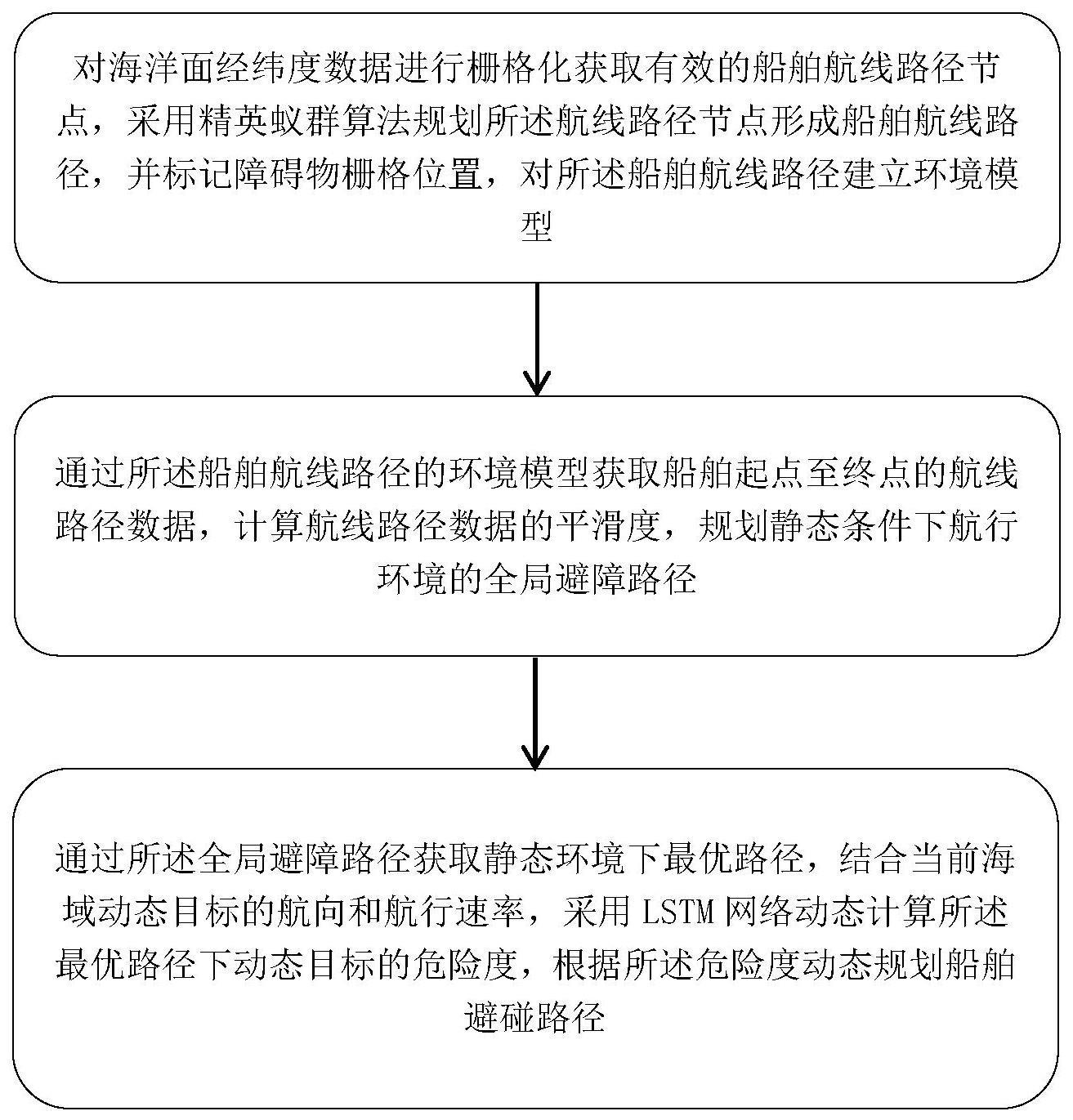
4、对海洋面经纬度数据进行栅格化获取有效的船舶航线路径节点,采用精英蚁群算法规划所述航线路径节点形成船舶航线路径,并标记障碍物栅格位置,对所述船舶航线路径建立环境模型;
5、通过所述船舶航线路径的环境模型获取船舶起点至终点的航线路径数据,计算航线路径数据的平滑度,规划静态条件下航行环境的全局避障路径;
6、通过所述全局避障路径获取静态环境下最优路径,结合当前海域动态目标的航向和航行速率,采用lstm网络动态计算所述最优路径下动态目标的危险度,根据所述危险度动态规划船舶避碰路径。
7、作为本发明的一种优选方案,对所述海洋面经纬度数据进行栅格化,包括:
8、根据海洋面经纬度数据将不规则障碍物扩充为矩形,建立直角坐标系,获取障碍物扩充后的矩形坐标;
9、根据坐标信息,计算各障碍物扩充为矩形后的面积sw=(xmax-xmin)(ymax-ymin),其中xmax、xmin表示水平方向上矩形两端的最大值和最小值,ymax、ymin表示竖直方向上矩形两端的最大值和最小值,w表示障碍物编号;
10、依次遍历航线环境中的障碍物,将各个障碍物矩形面积相加s=∑sw获取障碍物集合ω,根据障碍物面积和求取栅格标定值,确定栅格粒度,具体为:
11、
12、
13、其中,sw表示w号障碍物在当前环境下的二维面积总空间,lmax表示当前环境下障碍物矩形后的最大边长,lmin表示当前环境下能够表示静态障碍物为前提的确定的最小栅格边长,lw表示w号障碍物在当前环境下的矩形边长,l表示最终求取的栅格边长。
14、作为本发明的一种优选方案,以所述栅格边长的起始点建立直角坐标系,获取由栅格坐标定义的船舶航线路径节点坐标v(x,y),以所述路径节点坐标v(x,y)存储当前栅格的信息素浓度;
15、将栅格化后的静态障碍物表示为坐标形式,并将障碍物栅格坐标设置为禁忌表。
16、作为本发明的一种优选方案,采用所述精英蚁群算法将所述航线路径节点初始化,并对路径适应性进行评价,包括:
17、通过所述路径节点坐标v(x,y)获取栅格的信息素浓度,采用精英蚁群算法以蚂蚁单次选择前进方向的随机性初始化栅格信息素ρx,y,所述栅格信息素ρx,y公式为:
18、
19、其中,x,y表示任意路径节点坐标,xe、ye分别表示终点栅格横坐标和纵坐标,a1、a2表示权值,c表示当前环境下栅格总数量,m表示单次迭代中蚂蚁个体数量,ρ0表示信息素初值;
20、将栅格中路径分解,设定从栅格离开到达另一栅格为一步,迭代选择精英蚂蚁,并对蚂蚁路径的适应度进行评估,蚂蚁寻得路径的适应度评估方式为:
21、
22、
23、其中,e表示权值,可根据实际航行情况更改,angle(x)表示当前步的船舶转艏角,r表示栅格代表的实际边长,dk(x)表示编号为k的蚂蚁路径步长,lk表示精英蚂蚁值最大的路径适应度,n表示路径节点横坐标数量。
24、作为本发明的一种优选方案,通过所述路径适应度lk获取精英蚂蚁当前数据,利用精英蚂蚁算法在静态环境下对船舶进行路径规划,包括:
25、使用基于直角坐标的栅格法来对当前环境栅格化,将本船作为坐标原点,每个栅格定义路径节点坐标v(x,y)保存当前栅格信息素浓度和可移动的目标栅格;
26、将静态障碍物栅格化以后,获取障碍物所在栅格坐标,并根据障碍物所在位置更新坐标系中所有栅格对应的路径节点坐标v(x,y),更改可移动栅格,保存本次迭代中所有完成任务蚂蚁的路径和路径适应度lk;
27、设置蚂蚁当前位置,按状态转移规则选择栅格前进,并将原来所在栅格设置为不可移动,若某蚂蚁当前位置为终点,则计算当前蚂蚁寻得路径适应度,设置当前蚂蚁为当次迭代中的最优蚂蚁,计算当前蚂蚁适应度lk;
28、查询当次迭代完成任务蚂蚁的路径和适应度,对环境内栅格进行信息素更新,并查询当次迭代中最优蚂蚁的适应度,设置当次迭代最优蚂蚁为历史最优蚂蚁,判断迭代次数是否达到最大,输出历史最优蚂蚁路径信息。
29、作为本发明的一种优选方案,依据所述静态环境下船舶的规划路径,将规划路径上的信息节点坐标重新建立坐标系,以本船为坐标原点,获取会遇船只在当前坐标系下的坐标值、航向及航行速度信息;
30、以先进先出的管道数据结构存储数据,并对所有会遇船只记录数量为n的时刻数据,通过实际勘测得出某会遇船只是否会与本船发生碰撞,每条数据以船只作为编号,获取网络训练数据。
31、作为本发明的一种优选方案,将所述网络训练数据作为判断动态目标的碰撞危险度数据,包括:
32、采用数据训练lsmt网络对网络训练数据进行处理,将数据中会产生碰撞的船只标志位为1,不会则标志位为0,在航行中获取目标船数据,第一次计算危险度时,输入时刻只有当前时刻,仅将当前时刻t1输入,得出初步估算危险度;
33、每次估算危险度后留存上一时刻目标船所有数据,进行n次估算后,得到目标船只n个时刻数据,将t1到tn输入训练好的lstm网络,得出目标准确危险度;
34、当目标船已经存储过n个时刻数据,进行新一次危险度估计时,舍弃目标原tn时刻数据,重新获取当前时刻数据,重新构成n个时刻数据,进行危险度预测。
35、作为本发明的一种优选方案,利用所述数据训练lsmt网络获取各个目标船的预估危险度,将预估危险度最高的目标船作为优先避碰目标,将预估危险度作为权值与各目标船的计算危险度结合,获取描述安全性的适应度函数fitsafe,其表达式为:
36、
37、
38、其中,hk表示编号为k的目标船lstm网络的预估危险度,m表示目标船总数,dk表示编号为k的目标船与本船的距离,μ表示本船安全性权值。
39、作为本发明的一种优选方案,通过所述适应度函数fitsafe规划动态路径,包括:
40、依据本船的二维坐标系,将本船与动态目标简化为质点,本船作为坐标原点,获取所有目标船的坐标,确定本段路径的终点;
41、通过适应度函数fitsafe评估当前质点的个体适应度,若其值比当前迭代的最优粒子的适应度更大,则获取值较大的粒子作为最优粒子,在当前次迭代结束后,比较当前迭代最优粒子的适应度与历史最优粒子适应度,更新最优粒子适应度。
42、本发明与现有技术相比较具有如下有益效果:
43、本发明对静态全局环境栅格化后建模,简化了全局环境模型,提高了规划效率,建立了栅格坐标系后,便于使用蚁群算法进行动态规划,通过改进精英蚁群算法的信息素初始化公式,提高了精英蚁群算法的收敛速度,可以有效提升路径平滑度,减少船舶转艏次数,提高路径经济性,针对全局静态环境的路径,对船舶行至栅格处建立坐标系,通过ais等设备获取此区域内遇船只所在坐标和行进速率等数据,采用训练完成的lstm神经网络计算预估危险度,以改进的粒子群算法完成动态环境的避碰路径规划,可以使船舶在多目标的环境中迅速安全的完成避碰,得出的最优路径具有良好的经济性和安全性。
- 还没有人留言评论。精彩留言会获得点赞!