一种距离和风险双目标优化的极地船舶动态路径规划方法与流程
本发明涉及极地海域船舶安全航行路径规划领域,具体为一种距离和风险双目标优化的极地船舶动态路径规划方法。
背景技术:
1、在极地航行中,由于海洋和自然地理环境特殊因素,使得船舶极地航行安全尤为重要,可靠的路径规划需求也变得越来越高。虽然已有大量关于船舶航线规划的研究,但是缺乏在极地海域的应用。
2、路径规划方法可以根据栅格的使用情况分为基于栅格地图和不基于栅格地图的方法。其中基于栅格地图的路径规划算法中a*和dijkstra使用最为频繁,且均适用于静态环境,由于搜索方向的限制,不基于栅格地图的规划算法如遗传算法、rrt等被广泛的应用于船舶航线规划。极地船舶路径规划不同于其他海船路径规划,它需要综合考虑海冰密集度、海冰厚度等冰情以及船舶冰级信息。然而极地船舶所处的环境海冰数据时刻在变化,导致其通航指数发生变化,这就要求路径重新规划的速度足够快,以满足船舶航行实时性的要求,其中d*lite动态路径规划算法原理简单,容易实现,满足实时航道下的船舶重新规划的要求。
3、但是在栅格化环境中,如果直接将传统d*lite算法应用于船舶路径规划中,利用四邻域或者八邻域的搜索方法搜索路径,这样生成的路径不仅不平滑,导致路径不具有实用性,且不符合极地海域情况。
技术实现思路
1、为解决传统路径规划算法中存在的考虑参数单一无法直接应用于极地船舶路径规划,节点扩展范围太大存在大量重复计算节点导致算法计算效率低,规划出来的路径有大量拐点、路径不平滑的问题,本发明公开了一种距离和风险双目标优化的极地船舶动态路径规划方法,实现了将影响极地航行安全的因素加入算法中,通过polari系统与改进的d*lite算法进行结合,实现安全和距离双目标优化的动态路径规划,在缩短路径长度的同时提高了路径安全性,可操作性强,提高了动态路径规划算法的适用性。
2、具体方案如下所述:
3、一种距离和风险双目标优化的极地船舶动态路径规划方法,
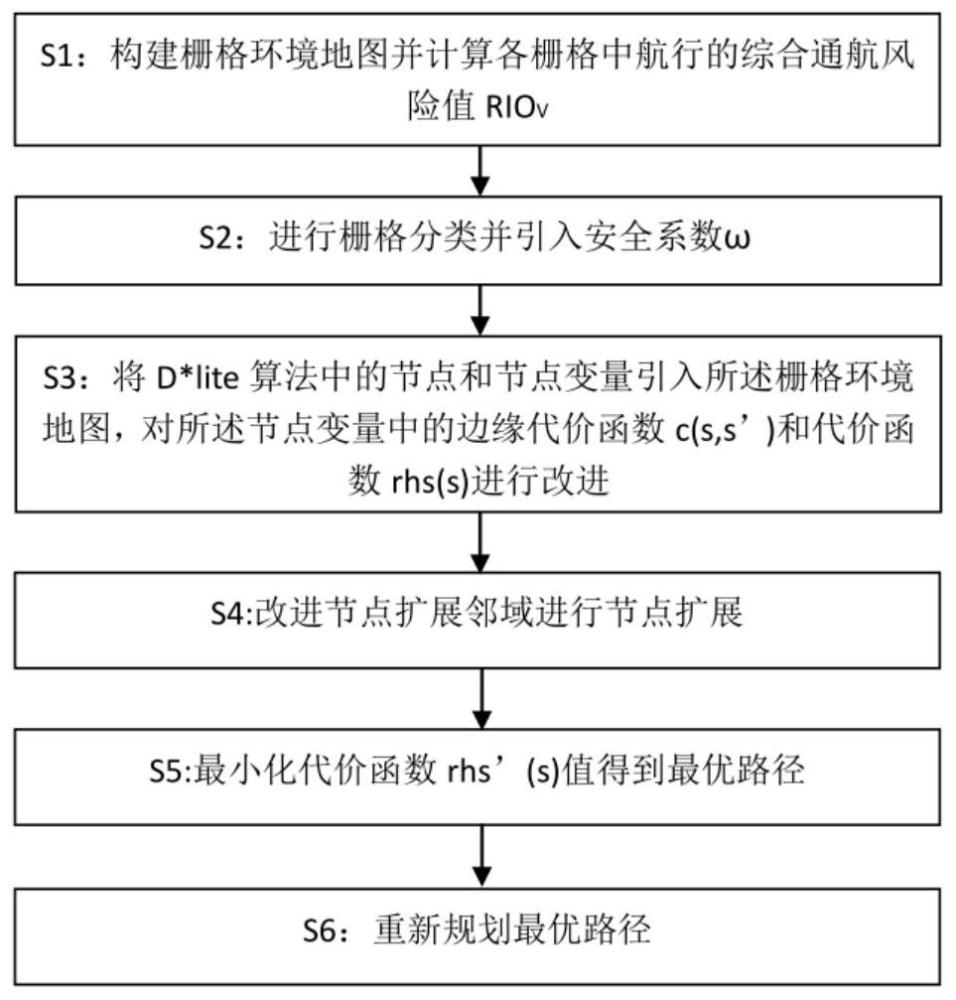
4、s1:构建栅格环境地图并计算各栅格中航行的综合通航风险值riov:获取规划路径区域的的海冰经纬度数据、海冰类型数据和海冰密集度数据,利用所述海冰经纬度数据构建由大小相同的栅格构成的栅格环境地图,选定船舶v进行航行,利用所述海冰类型数据在polaris系统中查找船舶v在各类型海冰下的船舶航行风险指数rvv,t,将所述船舶航行风险指数rvv,t与所述海冰密集度数据的乘积之和进行加权计算得到复杂冰况下船舶v在各栅格中航行的综合通航风险值riov;
5、s2:进行栅格分类并引入安全系数ω:根据综合通航风险值riov将所述栅格环境地图中栅格分类成危险栅格、风险栅格、自由栅格;设定常数ω作为安全系数,根据所述栅格分类的类型和安全系数对所述综合通航风险值riov进行分段处理得到分类栅格通航风险值rio’;
6、s3:将d*lite算法中的节点和节点变量引入所述栅格环境地图,所述节点包括起始节点、目标节点和中间节点,所述节点变量包括边缘代价函数c(s,s’)、代价函数rhs(s)、代价函数估计值g(s)和启发函数h(s,s’),对所述节点变量中的边缘代价函数c(s,s’)和代价函数rhs(s)进行改进;
7、s31:对边缘代价函数c(s,s’)进行改进:将d*lite算法中边缘代价函数c(s,s’)的自变量从节点连线距离改进为单位栅格距离,将沿栅格水平或垂直方向移动一个栅格产生的单位栅格距离定义为1,沿栅格对角线方向移动一个栅格产生单位栅格距离定义为将节点s和其相邻节点s’之间产生的单位栅格距离之和作为改进后的边缘代价函数c’(s,s’);
8、s32:对代价函数rhs(s)进行改进:将所述d*lite算法中的代价函数rsh(s)作为路径代价,在所述路径代价中引入s2所述分类栅格通航风险值rio’作为风险代价,利用路径代价权重i1和风险代价权重i2对所述路径代价和风险代价进行加权求和得到改进后的代价函数rhs’(s);
9、s4:改进节点扩展邻域进行节点扩展:邻域基于d*lite算法中节点扩展过程创建优先队列u,将s3所述目标节点放入所述优先队列u中开始对周围节点进行节点扩展,将d*lite算法中节点扩展的范围从8邻域改进为32邻域,所述32邻域为所述栅格环境地图中各节点的周围节点中32个不同方向的节点区域;
10、s5:最小化代价函数rhs’(s)值得到最优路径:利用s32所述改进后的边缘代价函数c’(s,s’)和s33所述改进后的代价函数rhs’(s)依次对所述栅格环境地图中各中间节点和起始节点进行节点扩展并得到各节点的代价函数rhs’(s)值最小值,将所述起始节点和目标节点中各路径的节点代价函数rhs’(s)值之和最小的路径作为最优路径;
11、s6:重新规划最优路径:所述船舶v从初始节点沿s5所述最优路径开始移动,每移动一个节点检查栅格环境地图中是否出现新的障碍物即是否出现新的危险栅格,如果出现新的危险栅格则更新危险栅格所在节点和受影响节点的所述节点变量,并重复s5步骤重新规划所述最优路径,直到船舶v航行到目标位置。
12、优选的,s1中船舶在各栅格航行过程中的所述综合通航风险值riov计算过程为:
13、riov=∑ct×rvv,t
14、其中,v表示船舶类型,t表示海冰类型,ct是指栅格内t类型海冰的密集度,取值范围是[0,1];rvv,t是指船舶v在t类型海冰覆盖区域航行的船舶航行风险指数,riov为复杂冰况下船舶v在各栅格中航行的综合通航风险值。
15、优选的,s2中栅格分类的方法为:将s1所述综合通航风险值riov小于0的栅格标记为危险栅格,将所述危险栅格周围第一层的8个栅格标记为风险栅格,未标记的栅格则为自由栅格。
16、优选的,s2中所述栅格通航风险值rio’的表现形式为:
17、
18、其中,rio风险是风险栅格对应的综合通航风险值,rio自由是自由栅格对应的综合通航风险值,rio危险是危险栅格对应的综合通航风险值。
19、优选的,s4所述32邻域中各节点之间的位置关系用7*7矩阵n32中各元素的不同取值来表示,所述矩阵n32的表现方式为:
20、
21、其中,7*7矩阵n32中最中心的元素即第四行第四列的元素代表当前节点s,其他元素分别代表前节点s周围三层内对应元素位置的邻域,所述矩阵n32中元素值为1的元素对应的邻域为所述当前节点s的32个可扩展邻域。
22、优选的,s31改进后得到的边缘代价函数c’(s,s’)为:
23、
24、其中,s和s’为互为相邻节点,节点s可以向节点s’的位置进行移动,xs和ys分别为节点s的横、纵坐标值,xs’和ys’分别为节点s’的横、纵坐标值。
25、优选的,s32所述的改进后的代价函数rhs’(s)为:
26、
27、其中,s为当前节点,rio’为s2所述分类栅格通航风险值rio’,succ(s)为可以从当下节点s行进到的所有其它节点的集合,i1为路径代价权重,i2为海冰风险代价权重,c’(s,s’)为s31所述改进后的边缘函数,g(s’)为节点s’处的函数估计值。
28、优选的,s4所述节点扩展的实现过程为:
29、s41:创建优先队列u并设置键值k,选择所述优先队列u中键值k最小的节点作为扩展节点,将所述扩展节点周围32邻域内的节点作为待扩展节点;
30、s42:以目标节点为起始点,将目标节点的代价函数值rhs’(s)初始化为0,将除目标节点之外其他节点的代价函数rhs’(s)初始化为∞,将所有节点的键值k和代价函数值g(s)初始值为∞,将所述目标节点放入优先队列u,对所述优先队列u中的扩展节点进行赋值并对其待扩展节点的代价函数值rhs’(s)和键值k进行更新,将更新后rhs’(s)值和g(s)值不相等的待扩展节点放入优先队列u,继续进行扩展,直至待扩展节点为起始节点。
31、优选的,s42所述对扩展节点进行赋值过程为:将所述扩展节点的自身的代价函数值rhs’(s)赋值给其自身的代价函数值估计值g(s);
32、优选的,s42所述对待扩展节点的代价函数值rhs’(s)和键值k进行更新的过程为:利用所述扩展节点的函数值估计值g(s)和所述改进后的边缘代价函数c’(s,s’)的和计算所述扩展节点的代价函数值rhs’(s),利用所述扩展节点的代价函数值rhs’(s)和启发函数h(s,s’)计算所述扩展节点的k值。
33、本发明具有如下有益效果:
34、本发明提出了一种改进型d*lite极地船舶动态路径规划方法,结合polaris在传统d*lite算法中引入船舶在复杂冰况下航行的综合通航风险值riov,并结合路径代价权重i1和风险代价权重i2构建风险、距离双目标优化的路径规划算法,从而得到更加平滑、安全性更高、且更具可实施性的风险、距离双优化路径。具体s1根据获取的海冰数据建立栅格环境地图,利用polaris系统对各个栅格的通航风险值进行量化,并根据量化结果对栅格做初步分类。能够更精准的对环境内的危险栅格进行判断和定位,并在环境出现变化时及时对路径及时作出优化;s2:对s1所述的栅格环境地图进行栅格分类引入安全系数w:通过将与危险栅格相邻的8个栅格标记为风险栅格,同时在风险栅格引入安全系数ω将所述风险栅格的综合航行风险值扩大ω倍,降低了所述风险栅格被选为最优路径的概率,从而避免了船舶斜穿过障碍物顶点的危险情况发生,大大提高了船舶在实际航行中的安全性;s3:扩展搜索邻域:在栅格环境中,利用n32矩阵的形式将目标点的邻域搜索方向从8邻域扩展至32邻域,使得船舶在航行过程中能够沿32个不同的方向进行移动,将船舶航行方向夹角缩小,从而大大提高了路径平滑度。32邻域搜索算法与48邻域和56邻域算法的路径平滑度、路径长度时间长度表现相当的情况下32邻域搜索算法实现复杂度更低,效率更高;最大化的提高了单次邻域的搜索范围,减少了整个航行过程中的搜索次数,缩短了路径的长度和航行时间。s4:构建海冰风险下各相邻节点之间的边缘函数c’(n,nm),利用栅格环境地图中的沿栅格水平垂直移动和沿栅格对角线移动的距离不同,将沿32邻域对应的不同方向移动所产生的实际距离代价进行区分,避免了在进行节点扩展时出现多个路径代价相等的扩展节点而导致的搜索效率降低的情况发生,同时也更接近实际航行中的路径代价值,大大提高了计算效率和精度;s5:构建海冰风险环境下各节点的综合代价函数rhs1(n):通过引入海冰综合航行风险值,将高纬度、天气、海冰等对船舶实际航行影响较大的因素加入到d*lite算法中,在原始d*lite算法原来的距离代价作为路径代价,将海冰风险环境下各栅格的分类通航风险值rio’作为风险代价,并引入路径代价权重i1和风险代价权重i2构建综合代价函数rhs1(s),将原始d*算法中仅仅考虑距离代价改进为将距离和风险产生的代价同时进行考量,达到距离和风险双优化的目的,使得预规划的路径在实际航行能规避大多数高风险海冰区域,大大提高了极地海域航行的安全性。s6:利用d*lite算法和s4、s5构建的边缘函数c’(n,nm)和综合代价函数rhs1(n)对上所述栅格环境地图中所有节点的综合代价函数值进行相邻节点迭代,在每一次相邻节点迭代中选择综合代价函数值最小的节点作为下一次迭代的迭代起点,使得传递给下一次迭代的前继节点的综合代价函数值尽可能的小,从而得到距离和风险双目标优化的最优路径,并在环境改变时及时更新各节点参数信息快速对路径进行重新规划,能够在兼顾航行效率的同时降低航行风险。
- 还没有人留言评论。精彩留言会获得点赞!