一种堆垛机的控制方法及装置与流程
本发明涉及堆垛机控制,具体为一种堆垛机的控制方法及装置。
背景技术:
1、随着经济形势的快速发展,物流仓储技术的发展越来越快,传统的人工仓库已无法满足现代仓储的需求,具有较高运输和空间利用流程的物流堆垛机立库正逐渐受到企业的广泛追捧,堆垛机是一种用于垂直堆放货物的自动化设备,通常在仓库、物流中心或生产线等场所使用,能够高效地搬运和堆放货物,以节省空间和提高物流效率,当前针对堆垛机的控制方法定位精度不高,需要人工手动调节,效率较低,因此需要对堆垛机的控制方法进行改进。
2、例如公告号为:cn110727241b的发明专利,公开的一种转轨堆垛机路径生成与运动控制方法,控制方法包括转轨路径生成方法、路径冲突检测方法、转轨命令生成方法、道岔控制与路径状态检测方法四部分,该发明控制方法基于生成树生成路径,面向路径实现控制,简化了程序设计和交互数据,实现了堆垛机与道岔转轨机构的模块化设计,并减少了上下位机交互,提高了转轨作业效率。
3、如今,对堆垛机控制方面还存在一些不足,具体体现在以下几个层面:(1)堆垛机仓库巷道每层货位数通常都在上百个,巷道长度通常都在数十米以上,堆垛机执行任务时定位精度低,经常无法对正货位,发生故障时都需要人员手动操作堆垛机对正,费时费力,可靠性低。
4、(2)堆垛机行走电机一般为三相异步电机,在急加速与急减速过程中,主动轮会与轨道产生轻微打滑,测距仪记录的数据会与实际行走的距离产生偏差,导致定位不准,定位出现偏差后,控制器会进入故障模式,无法执行正常任务,需要人员处理,运行效率低。
技术实现思路
1、针对现有技术的不足,本发明提供了一种堆垛机的控制方法及装置,能够有效解决上述背景技术中涉及的问题。
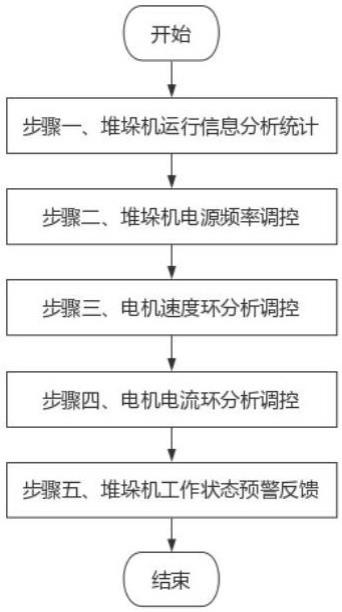
2、为实现以上目的,本发明通过以下技术方案予以实现:本发明第一方面提供了一种堆垛机的控制方法,包括:步骤一、提取堆垛机的运行信息进行分析,计算堆垛机的基础应用损耗值。
3、步骤二、感知堆垛机的载重值,并计算堆垛机的运作阻碍值,据此对堆垛机的交流电源进行调控。
4、步骤三、对堆垛机的电机速度环控制架构进行分析,计算各检测周期内堆垛机的电机速度调控需求指数,并对堆垛机的电机速度进行调控。
5、步骤四、对堆垛机的电机电流环控制架构进行分析,计算各检测周期内堆垛机的电机电流调控需求指数,并对堆垛机的电机电流进行调控。
6、步骤五、对堆垛机的运行工作状态进行监测,计算各检测周期内堆垛机的工作异常程度指数,并通过控制器进行状态异常预警。
7、作为进一步的方法,所述计算堆垛机的基础应用损耗值,具体分析计算过程为:从堆垛机数据库中获取堆垛机的实际投入使用时长、总运送次数和各次运载重量,综合计算堆垛机的基础应用损耗值,其计算公式为:,其中、和分别表示为设定的单位时长、单次运送和单位运载重量对应的影响因子,表示为各次运载的编号,,表示为运载的总次数。
8、作为进一步的方法,所述计算堆垛机的运作阻碍值,据此对堆垛机的交流电源进行调控,具体过程为:利用重力传感器感知得到堆垛机的载重值,并依据堆垛机的基础应用损耗值,综合计算堆垛机的运作阻碍值,其计算公式为:,其中表示为自然常数,表示为设定的单位载重值对应的影响因子。
9、从堆垛机数据库中提取堆垛机运作阻碍值对应的需求交流电源频率,并通过变频器将堆垛机工频电源的交流电源频率变换成需求交流电源频率,同时将堆垛机的运作阻碍值与预定义的各运作阻碍值范围所属比对数据集进行比对,得到堆垛机对应的比对数据集,比对数据集包括参照电机速度、参照时间-转矩关系曲线、参照电机转矩、参照电机功率、参照标准货物图像面积、货物与放置空间的参照相对距离。
10、作为进一步的方法,所述对堆垛机的电机速度环控制架构进行分析,计算各检测周期内堆垛机的电机速度调控需求指数,具体分析计算过程为:以设定检测周期对堆垛机运输过程进行检测,并以设定数目对检测周期进行时间点划分,利用编码器检测得到各检测周期内堆垛机的各时间点的电机速度,进而计算各检测周期内堆垛机的各时间点的电机速度误差,其计算公式为:,其中表示为比对数据集中的参照电机速度,表示为各检测周期的编号,,表示为检测周期的总数,表示为各时间点的编号,,表示为时间点的总数。
11、综合计算各检测周期内堆垛机的电机速度调控需求指数,其计算公式为:,其中表示为设定的单位电机速度误差对应的调控需求因子。
12、作为进一步的方法,所述对堆垛机的电机速度进行调控,具体分析过程为:综合计算各检测周期内堆垛机的电机速度调控的控制需求信号值,其计算公式为:,其中表示为设定的单位电机速度调控需求指数对应的控制需求信号值,表示为设定的电机速度调控的控制需求信号补偿因子。
13、电机速度控制系统依据各检测周期内堆垛机的电机速度调控的控制需求信号值,从堆垛机数据库中匹配得到各检测周期内堆垛机的电机速度调控的控制需求信号值对应的适配运作速度,进而对电机速度进行调控。
14、作为进一步的方法,所述对堆垛机的电机电流环控制架构进行分析,计算各检测周期内堆垛机的电机电流调控需求指数,具体分析过程为:检测得到各检测周期内堆垛机的各时间点的电机转矩,进而构建各检测周期内堆垛机的实际时间-转矩关系曲线,同时提取运输过程中的各检测周期内堆垛机的电机峰值转矩以及实际时间-转矩关系曲线的曲线长度,并将各检测周期内堆垛机的实际时间-转矩关系曲线与参照时间-转矩关系曲线进行重合比对,得到转矩曲线重合长度,从堆垛机数据库中获取电机负载最大承受临界转矩,综合计算各检测周期内堆垛机的电机转矩异常值,其计算公式为:,其中表示为比对数据集中的参照电机转矩,表示为设定的允许偏差电机转矩,和分别表示为设定的电机转矩和转矩曲线长度所属权重占比,表示为各检测周期的编号,,表示为检测周期的总数,表示为各时间点的编号,,表示为时间点的总数。
15、依据各检测周期内堆垛机的电机转矩异常值从堆垛机数据库中匹配得到各检测周期的电机需求电流,同时检测得到各检测周期内堆垛机的各时间点的电机电流,进而计算各检测周期内堆垛机的各时间点的电机电流误差,其计算公式为:。
16、综合计算各检测周期内堆垛机的电机电流调控需求指数,其计算公式为:,其中表示为设定的单位电机电流误差对应的调控比例系数。
17、作为进一步的方法,所述对堆垛机的电机电流进行调控,具体分析过程为:综合计算各检测周期内堆垛机的电机电流调控的控制需求信号值,其计算公式为:,其中表示为设定的单位电机电流调控需求指数对应的控制需求信号值,表示为设定的电机电流调控的控制需求信号补偿因子。
18、电机电流控制系统依据各检测周期内堆垛机的电机电流调控的控制需求信号值,从堆垛机数据库中匹配得到各检测周期内堆垛机的电机电流调控的控制需求信号值对应的各检测周期的需求输入电流值,进而对电机电流进行调控。
19、作为进一步的方法,所述对堆垛机的运行工作状态进行监测,具体分析过程为:对堆垛机的电机电压进行监测,得到各检测周期内堆垛机的各时间点的电机电压,并根据各检测周期内堆垛机的各时间点的电机电压,进而计算各检测周期内堆垛机的各时间点的工作功率,其计算公式为:,其中表示为各检测周期的编号,,表示为检测周期的总数,表示为各时间点的编号,,表示为时间点的总数。
20、综合计算各检测周期内堆垛机的电机功率异常程度指数,其计算公式为:,其中表示为设定的允许偏差电机功率,表示为比对数据集中的参照电机功率。
21、以堆垛机运输货物的中心点以及放置空间的中心作为参照位置基准点,利用绝对值测距仪监测得到各检测周期内各时间点货物与放置空间的相对距离,并利用监控得到各检测周期内各时间点的参照货物图像,提取各检测周期内各时间点的监控画面的货物图像面积。
22、综合计算各检测周期内堆垛机的货物位置异常程度指数,其计算公式为:,其中表示为参照标准货物面积,表示为货物参照相对距离,和分别表示为设定的允许偏差相对距离和允许偏差货物图像面积,和分别表示为设定的相对距离和货物面积对应的修正因子。
23、作为进一步的方法,所述计算各检测周期内堆垛机的工作异常程度指数,并通过控制器进行状态异常预警,具体计算分析过程为:综合计算各检测周期内堆垛机的工作异常程度指数,其计算公式为:,其中和分别表示为设定的电机功率异常程度和货物位置异常程度所属占比权重。
24、从堆垛机数据库中获取工作异常程度指数阈值,并将各检测周期内堆垛机的工作异常程度指数与工作异常程度指数阈值进行比对,若某检测周期内堆垛机的工作异常程度指数高于工作异常程度指数阈值,则启动语音预警执行控制器对该检测周期内堆垛机的工作状态进行反馈警示。
25、本发明第二方面提供了一种堆垛机的控制装置,包括:处理器,以及与处理器连接的内存和网络接口;所述网络接口与服务器中的非易失性存储器连接;所述处理器在运行时通过所述网络接口从所述非易失性存储器中调取计算机程序,并通过所述内存运行所述计算机程序,以执行上述任一项所述的方法。
26、相对于现有技术,本发明的实施例至少具有如下优点或有益效果:
27、(1)本发明通过提供一种堆垛机的控制方法及装置,变频器控制电机提高堆垛机的高机动性,实现高速准确的运行到目标位置,绝对值测距仪提高堆垛机的定位精度,解决掉重复运行产生的误差累积,编码器保证电机的速度稳定性,提高电机的响应速度和控制精度,控制器负责堆垛机的运行状态和故障检测,提前预警,上游交互,保证设备的全自动仓储功能和扩展性。
28、(2)本发明通过依据堆垛机的磨损和负载匹配比对数据集,为后续选择适当电机转矩和速度提供依据,可以使堆垛机在承受工作负荷时处于最佳工作状态,减少不必要的磨损和损坏,从而延长设备的使用寿命,同时使堆垛机在提升货物、移动和堆放货物时具有更好的响应速度和准确性,从而提高物流操作的效率和稳定性,减少事故发生风险。
29、(3)本发明通过对电机采用双闭环控制结构,利用编码器实时检测电机速度,速度环及时对异常电机速度进行调节,同时利用电流环调节电流,进而对电机转矩进行控制,通过电机的双闭环控制,实现了电机的自动运行,从而确保堆垛机的稳定运动控制,使堆垛机运行更加平稳和快速,提高了堆垛机的工作效率。
30、(4)本发明通过监控和绝对值测距仪准确识别和定位货物位置,有助于减少货物运送过程中出现的偏差,提高操作的精度和准确性,避免不必要的移动和调整,进而提高工作效率,增加物流操作的生产力,同时准确感知货物位置,可以避免与其他货物、设备或人员发生碰撞,有助于提高工作区域的安全性,保护人员和设备的安全。
- 还没有人留言评论。精彩留言会获得点赞!