一种仿地航路规划方法及系统与流程
本发明涉及航路规划,特别涉及一种仿地航路规划方法及系统。
背景技术:
1、无人航路规划作为无人机自主飞行的关键技术之一,当前已有较为成熟的传统方法,按照不同的路径规划框架架构可分为基于集中式与分布式的航路规划方法,集中式航路规划主要有:1)启发式优化算法,如蚁群算法、a*算法动态加权法;2)数学优化方法,同时选择调速、调向与调高度的序列混合整数线性优化,生成解脱路径。在航路预规划的前提下,利用混合整数线性规划方法,再进行精细规划。分布式航路规划主要有:1)势场法,基于人工势场法推出规则的六边形导引方法来改善局部极小问题。针对动态环境进行运动物体检测与回避的相对速度法,既适用于静态环境又适用于动态环境。2)几何法,在速度障碍法基础上,推出最优互惠避碰算法,适用速度改变受限的航空器,避免规划出平行不可飞的路径。另外,还有将机器学习、模型预测控制、博弈论应用在航路规划中,均有一定的特色与优势。
2、随着无人机作业空域从中高空不断向低空甚至超低空拓展,在数据采集、低空侦查等领域,仿地飞行的价值也越来越凸显,但仿地飞行需要克服更多的低空复杂障碍环境以及地形起伏对无人机可能造成的威胁。目前,大多数仿地飞行航路规划都停留在原始的人工编辑航线,或者简单规划距离最短优先的航线,而无法将避障、地形风险、距离、机动性约束等几方面进行有机结合。
3、目前的仿地飞行解决方案,其步骤通常如下:
4、1)人工编辑一条飞行航线,或者计算机自动规划一条指定起/终点位置的距离较短航线(支持避障)。
5、2)无人机搭载毫米波雷达等传感器进行飞行作业。
技术实现思路
1、本发明的实施例针对仿地飞行所面临的实际问题,提出一种可实现坡度最缓的仿地航路规划方法,包括如下步骤:
2、生成给定范围的坡度数据并存储;
3、根据所述坡度数据和栅格八方向连通性建模构建相应的节点拓扑关系并存储;
4、通过坡度最缓航路规划算法并借助所述坡度数据和所述节点拓扑关系,分别计算出所述给定范围内任意两点间的坡度代价最小的路径,其中,所述坡度最缓航路规划算法支持动态避障以及拓扑关系动态导入;
5、根据各所述坡度代价最小的路径在栅格图上规划出矢量航线;
6、把所述矢量航线在保持整体形状的前提下转换成实际可飞行的航线。
7、本发明的实施例还可采用如下优先或可选的技术方案:
8、所述坡度最缓航路规划算法包括:
9、地形坡度生成步骤,采用坡度通用计算公式,对每个网格点都读取周边8个相邻点的高程值,并做相应的计算获得该点的坡度值信息,所述高程值和所述坡度值信息以float形式存储;拓扑关系动态构建步骤,根据当前规划起/终点位置计算出坡度数据导入范围,之后一次性导入坡度数据,并构建起连接节点八方向的拓扑关系;禁飞区快速栅格化步骤,对被禁飞区覆盖的区域的网格节点做拓扑关系断开处理;根据以上结果规划出相应的坡度代价最小的路线,也即坡度最缓航线。
10、所述禁飞区快速栅格化步骤为:先根据所述禁飞区的形状计算出禁飞区bound范围,再根据所述禁飞区bound范围获取所包含的地形栅格的栅格索引范围,根据所述栅格索引范围获取栅格具体位置点,之后根据设定的阈值逐个比对所述位置点的位置,以此来标识栅格索引点是否需要被屏蔽处理,并对符合条件的所述位置点进行屏蔽处理。所谓符合条件的所述位置点是指被标识为落入所述禁飞区bound范围的位置点,或者还可包括在所述禁飞区bound范围的在边界附近,所述在边界附近可根据实际需要进行设定即可。
11、所述禁飞区快速栅格化步骤具有如下两方面的优势:一个是禁飞区转换成拓扑连通关系快速,通过bound包含的网格中心点和多边形的关系判断即可完成全部判断。另一个是通过这种转换,可以快速提升后续航路规划性能,原因在于一次转换,可一直(重复)使用,而无需在每次航路规划时去动态判断航线是否和禁飞区相交。
12、所述坡度代价最小的路线的算法采用dj算法或a*算法,包括如下步骤:
13、先把起点压入堆管理器,之后循环所述堆管理器每次弹出当前活叶节点中耗费最小的节点,把该耗费最小的节点的8个邻居节点压入所述堆管理器中,如果邻居节点的耗费值已经被赋予,则比较当前耗费和已有耗费的大小,动态修改邻居节点的耗费值,保留小值;以此循环,直到找到终止节点为止;
14、再逆序找出途经节点即是原始航路结果,算法结束。
15、每次增加新的叶结点时,都会利用所述堆管理对象重新排序当前所有有效叶结点权重。
16、还包括航线快速简化步骤,采用道格拉斯普克算法和光栏法相结合的方法进行航线简化,并先用道格拉斯普克法进行航线简化,再用光栏法进行航线简化。
17、所述道格拉斯普克算法和所述光栏法的阈值选取采用经验值或根据地形数据的分辨率来取值。
18、所述阈值为1.2-1.5倍地形分辨率,且随着所述地形分辨率变大,所述阈值的变化小于所述地形分辨率的变化。
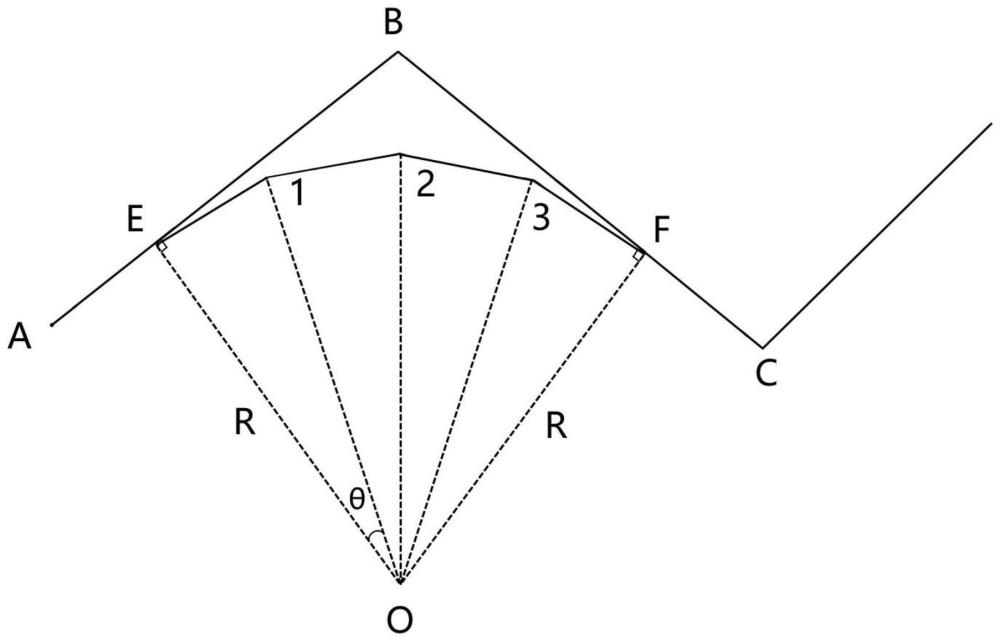
19、所述矢量航线采用三维空间下的衔接圆弧拟合算法得到,具体为:
20、根据转弯半径和航点转角计算出圆弧拟合起/止位置点和圆心位置;
21、再根据预设的角度间隔阈值,按向量方法逐点计算圆弧边界点坐标,即得到各个离散航点的圆弧拟合点;
22、顺序连接各个所述圆弧拟合点以及所述起/止位置点,即为所述矢量航线。
23、本发明的实施例还提供一种可实现坡度最缓的仿地航路规划系统,包括:
24、地形数据管理模块,用于生成给定范围的坡度数据并存储;
25、坡度计算模块,用于提供地形高程到坡度之间的转换算法;
26、拓扑关系构建模块,根据所述坡度数据和栅格八方向连通性建模构建相应的节点拓扑关系并存储;
27、路径规划模块,用于在构建的所述节点拓扑关系中,对给定的起/终点进行最佳航路计算,进而生成最佳航线;
28、可飞行航线生成模块,根据各所述坡度代价最小的路径在栅格图上规划出矢量航线;
29、转换模块,把所述矢量航线在保持整体形状的前提下转换成实际可飞行的航线。
30、优选的,还包括禁飞区管理模块和/或航线简化模块;
31、所述禁飞区管理模块用于对禁飞区快速栅格化处理,并对被禁飞区覆盖的区域的节点做拓扑关系断开处理;
32、所述航线简化模块采用道格拉斯普克算法和光栏法相结合的方法进行航线简化,并先用道格拉斯普克法进行航线简化,再用光栏法进行航线简化。
33、还优选的,所述路径规划模块可支持动态避障以及拓扑关系动态导入,所述路径规划模块借助所述坡度数据和所述节点拓扑关系,分别计算出所述给定范围内任意两点间的坡度代价最小的路径,并在此基础上生成所述最佳航线;
34、所述航线简化模块采用道格拉斯普克算法和光栏法相结合的方法进行航线简化,并先用道格拉斯普克法进行航线简化,再用光栏法进行航线简化。
35、本发明的实施例与现有技术相比至少具有如下有益效果之一:
36、本发明的实施例可以最大限度克服由地形起伏引起的飞行风险问题,同时在地形坡度约束之下可确保规划的航路最短。
37、另外,本发明的实施例还把禁飞区避障和作业区拓扑关系构建融二为一,通过屏蔽禁飞区范围内的地形拓扑关系实现了避障效果。
38、本发明的实施例为无人机安全飞行和避障提供了一套解决方案,为无人机在复杂地形环境中提高生存率提供了坚实的技术保证。
- 还没有人留言评论。精彩留言会获得点赞!