一种商品车转运AGV自主作业系统
本发明涉及商品车转运领域,尤其涉及一种商品车转运agv自主作业系统。
背景技术:
1、商品车进出口贸易作为我国港口支柱产业之一,对港口的发展起到了关键性作用。随着我国商品车物流产业的不断发展,商品车进出口贸易面临传统转运模式效率低下和运营成本高居不下等问题。目前港口传统的商品车转运模式是通过人工驾驶商品车从堆场搬运至滚装船。该模式下需要大量驾驶员和地面引导人员指挥驾驶和调度作业,增加人工成本的同时也无法实现标准化作业和最优作业,因此亟需对滚装码头智慧化转型升级。
2、agv(automated guided vehicle)作为一种自动化、信息化和智能化设备,其可通过上层指令自动将商品车搬运至目标地点。在港口自动化商品车辆转运领域,agv的应用已成为不可避免的趋势。因此,迫切需要开发一种综合管理和调度水平的商品车转运agv自主作业系统,以实现滚装物流船、运输线路、对方区域、立体车库等任务的完整水平运输与装卸操作。这一系统将实现对自动驾驶运输车辆的管理,并提高水平运输效率,从而提升港口整体作业效率。
技术实现思路
1、针对商品车传统转运模式效率低下和运营成本高居不下等问题,本发明的目的是提供一种商品车转运agv自主作业系统,该系统通过云端调度规划和车端作业控制,能够实现滚转码头智能理货、智能转运、智能调度等功能,显著提升码头作业效率,降低运营成本。
2、本发明的目的是通过下述技术方案实现的。
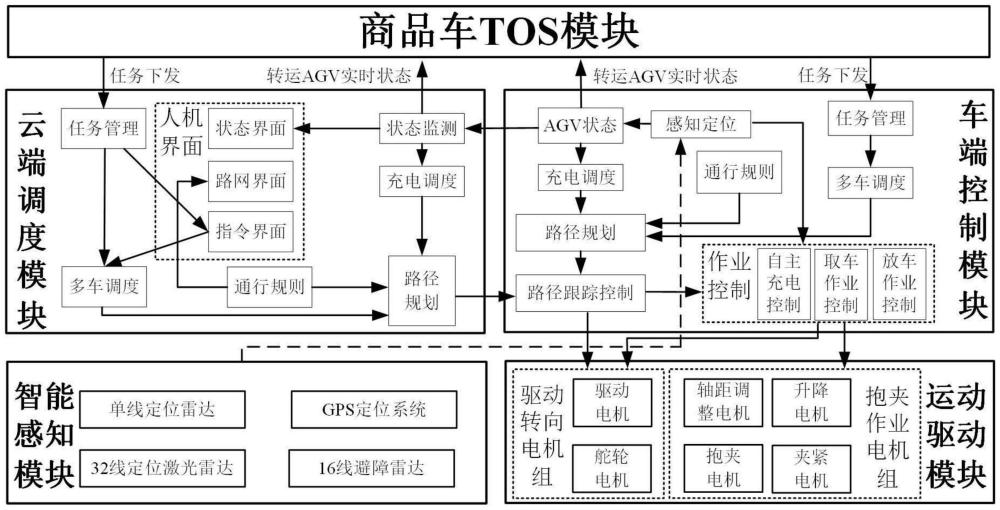
3、本发明公开的一种商品车转运agv自主作业系统,该系统主要由商品车tos模块、云端调度模块、车端控制模块、智能感知模块、运动驱动模块组成。商品车tos模块负责制定商品车转运计划组,并能够同时发送给云端调度模块和车端控制模块。云端调度模块接收商品车tos模块所下发的命令,并与车端控制模块进行信息交互,将路径规划信息直接发到各个转运agv车端控制模块。车端控制模块优先与云端调度模块信息流交互,在失去与云端调度模块通信后能够直接与商品车tos模块信息流交互,在接收云端调度模块或商品车tos模块信号后,通过智能感知模块采集车体信息和环境信息,形成控制命令下发到运动驱动模块。智能感知模块通过多个传感器对转运agv和商品车定位,并采集周围环境信息上传到车端控制模块,使车端控制模块能够根据周围环境信息做出控制决策。运动驱动模块包含多个执行电机,通过接收车端控制模块的指令,驱动电机运动,进而使转运agv完成转运商品车工作。其中,商品车tos模块和云端调度模块均部署在远程服务器上,车端控制模块、运动驱动模块和智能感知模块均部署在各个转运agv上。
4、所述的云端调度模块包括任务管理、多车调度、通行规则、状态监测、充电调度、路径规划和人机界面七个子模块,人机界面子模块进一步包括状态界面、路网界面和指令界面三部分。任务管理子模块负责管理所有转运agv任务,其接收来自商品车tos模块的任务,并将任务发给多车调度子模块和人机界面子模块中的指令界面。多车调度子模块负责根据接收到的任务及上线的转运agv进行任务细分,其接收任务管理子模块和人机界面子模块中的指令界面所下发的任务,并将各车细分后的任务下发到路径规划子模块中。通行规则子模块为人为设定的通行车道及各路口的通行规则,其直接将规则下发至路径规划子模块和人机界面子模块中的路网界面。状态监测子模块负责监控各转运agv的实时状态,其接收各转运agv车端控制模块中的agv状态子模块所传递过来的信息,并将相关信息传递给商品车tos模块、人机界面子模块中的状态界面和充电调度子模块。充电调度子模块根据各转运agv的实时状态和实际需求提前规划各转运agv充电时间和计划,并将所做的规划下发到路径规划子模块中。路径规划子模块根据所设定的通行规则以及所获取的任务信息和充电信息动态规划各转运agv所要行驶的全局路径,其接收充电调度子模块、通行规则子模块和多车调度子模块所传递的信息,并将所规划的全局路径下发到各转运agv车端控制模块中的路径跟踪控制子模块中。人机界面子模块主要负责与操作工进行人机交互,其中指令界面能够显示转运agv的所有任务,指令界面在有特殊需求时能够人为对任务进行操作管理,指令界面接收任务管理子模块的信息,并能够将人为操作管理后的任务信息下发给多车调度子模块,路网界面显示设定好的车道及路口通行规则,其接收通行规则子模块传递的信息,并显示在界面上便于操作工对其监控,状态界面则实时显示各转运agv的状态信息,便于操作工实时监控,其接收状态监控子模块传递的信息。
5、所述的车端控制模块包括任务管理、多车调度、通行规则、充电调度、路径规划、路径跟踪控制、作业控制、感知定位和agv状态九个子模块,其中作业控制进一步包括自主充电控制、取车作业控制和放车作业控制三部分。任务管理子模块负责管理所有转运agv任务,其接收来自商品车tos模块下发的任务,并将任务发给多车调度子模块。多车调度子模块根据接收到的任务及上线的转运agv进行任务细分,其接收来自任务管理子模块所下发的任务,并将细分后本转运agv的任务下发到路径规划子模块中。通行规则子模块为人为设定好的通行车道及各路口的通行规则,其直接将规则下发至路径规划子模块。充电调度子模块根据本转运agv的实时状态和实际需求提前规划本转运agv充电时间和计划,并将所做的规划下发到路径规划子模块中。路径规划子模块根据所设定的通行规则以及所获取的任务信息和充电需求动态规划本转运agv所要行驶的全局路径,其接收充电调度子模块、通行规则子模块和多车调度子模块所传递的信息,并将所规划的全局路径下发到路径跟踪控制子模块中。路径跟踪控制子模块根据所接收到的全局路径控制转运agv按照预定路径移动,包括控制转运agv的速度、方向、加速度,其接收来自车端控制模块中的路径规划子模块和云端调度模块中的路径规划子模块的信息,并将具体的控制参数下发到作业控制子模型和运动驱动模块中的驱动转向电机组中。作业控制子模块根据转运agv的定位信息和实际需求控制转运agv的工作模式,其接收路径跟踪控制子模块和感知定位模块所下发的信息,并将具体作业控制指令下发到运动驱动模块的驱动转向电机组和抱夹作业电机组。其中自主充电控制为商品车到达充电桩后,通过控制转运agv的部分电机实现转运agv与充电桩的自动对接,取车作业控制为转运agv到达指定位置后,通过控制转运agv上的部分电机实现商品车对接、车轮定位和商品车抱起动作,放车作业控制为转运agv夹持商品车到达指定位置后控制转运agv上的部分电机完成放车和退出的动作。感知定位子模块主要用于转运agv自身的定位和定向、行驶过程中的障碍物定位以及转运agv作业任务时商品车车身和车轮定位,其接收智能感知模块中单线定位雷达、gps定位系统、32线定位激光雷达和16线避障雷达实时反馈的信息,并将相关信息传递给agv状态子模块和作业控制子模块。agv状态子模块主要用于收集保存转运agv实时运行数据、状态和位置等信息,其接收感知定位子模块的数据信息,并将数据信息发送给充电调度子模块、商品车tos模块和云端调度模块中的状态监测子模块。
6、所述的云端调度模块和所述的车端控制模块均包括任务管理子模块、多车调度子模块、通行规则子模块、充电调度子模块和路径规划子模块,在正常工作时,云端调度模块中的任务管理子模块、多车调度子模块、通行规则子模块、充电调度子模块和路径规划子模块优先发挥作用,车端控制模块中的任务管理子模块、多车调度子模块、通行规则子模块、充电调度子模块和路径规划子模块不起作用,当云端调度模块故障或云端调度模块与车端控制模块通讯中断时,启动车端控制模块中的任务管理子模块、多车调度子模块、通行规则子模块、充电调度子模块和路径规划子模块。
7、所述的运动驱动模块包括驱动转向电机组和抱夹作业电机组。驱动转向电机组包含驱动电机和舵轮电机,驱动电机负责驱动转运agv四轮前进和后退,舵轮电机负责驱动转运agv四轮转向,驱动转向电机组接收车端控制模块中的路径跟踪控制子模块和作业控制子模块所下发的控制指令。抱夹作业电机组包含轴距调整电机、升降电机、抱夹电机和夹紧电机,轴距调整电机负责调整转运agv前后两对夹爪的距离,确保可夹持不同轴距的商品车,升降电机负责调整四个夹爪的高度,确保能够将商品车四轮抱起,抱夹电机负责四个夹爪的开闭,确保夹持住商品车四个轮子,夹紧电机负责商品车车轮抱夹后车轮的侧面夹紧,确保行驶过程中不会因为地面不平导致商品车晃动刮蹭。抱夹作业电机组接收车端控制模块中的作业控制子模块下发的控制指令,驱动各电机完成要求动作。
8、所述的智能感知模块包含单线定位雷达、gps定位系统、32线定位激光雷达和16线避障雷达。其中单线定位雷达主要用于转运agv和商品车对接时商品车车轮定位,gps定位系统主要用于转运agv在行驶过程中的自身定位定向,32线定位激光雷达主要用于转运agv在取商品车时对商品车车身的定位,16线避障雷达主要用于转运agv行驶过程中的障碍物避障,所述的智能感知模块将其各传感器采集的信息传递给车端控制模块中的感知定位子模块,便于感知定位子模块对各传感器采集信息处理后使用。
9、有益效果:
10、1、相比于传统的人工驾驶商品车在堆场和滚装船之间转运,本发明公开的一种商品车转运agv自主作业系统,由商品车tos模块,云端调度模块、车端控制模块、智能感知模块和运动驱动模块组成的商品车转运智能体系,改变了港口商品车转运严重依赖于驾驶员驾驶和地面引导人员调度进行作业的现状,填补了滚装码头商品车智能无人转运的空白。
11、2、相比于传统的物流agv严重依赖调度作业的问题,本发明公开的一种商品车转运agv自主作业系统,采用轻算力的调度模式,能够灵活部署在车端和云端,并且在与云端通信中断时,车端具备高度自主化和智能化,解决了传统的物流agv严重依赖调度作业的问题,显著提升码头作业效率。
12、3、本发明公开的一种商品车转运agv自主作业系统,充分融合平台全局作业信息和单车局部感知信息,大规模提升作业场地时间空间自由度和车辆行为、状态的预测能力,提高了商品车转运过程中的可靠性,降低了商品车转运过程中的安全隐患。
13、4、本发明公开的一种商品车转运agv自主作业系统,在商品车转运agv自主转运商品车工作时,在出现特殊需求或异常事故时,可通过云端调度模块中的人机界面子模块与操作工进行信息交互,满足了实际特殊作业需求,大大提升了处理异常事故的效率。
- 还没有人留言评论。精彩留言会获得点赞!