一种无人直升机集群的编队巡逻飞行方法及装置与流程
本发明涉及无人集群控制,尤其涉及一种无人直升机集群的编队巡逻飞行方法及装置。
背景技术:
1、无人直升机指通过地面遥控器或自动控制方式进行操纵的不载人旋翼飞行器,具有垂直起降、空中悬停、任意方向飞行、低空飞行等功能。无人直升机培养飞控手费用较低,无空中人员伤亡等优点,其中大型无人直升机机具有续航时间长,载荷重量大等特点,在救灾、运输、侦察、打击等领域有广泛的应用。大型无人直升机也具有一定的缺点,如飞机转向困难,惯性大,使得其较难执行编队飞行任务
2、现有编队飞行算法主要针对小型四旋翼无人机,这类方法通常通过控制无人机飞向实时变化的位置来使无人机小队保持队形,由于小型四旋翼无人机与大型无人机有着完全不同的动力学模型,因此这些算法无法适用于大型直升机编队飞行任务。
技术实现思路
1、本发明所要解决的技术问题在于,提供一种无人直升机集群的编队巡逻飞行方法及装置,通过分别控制无人机线速度使得从机保持队形距离,控制角速度保证无人机在航线内,避免了大型无人机转向困难,惯性大的问题,在大型无人直升机编队飞行任务上有较好的表现。
2、为了解决上述技术问题,本发明实施例第一方面公开了一种无人直升机集群的编队巡逻飞行方法,所述方法包括:
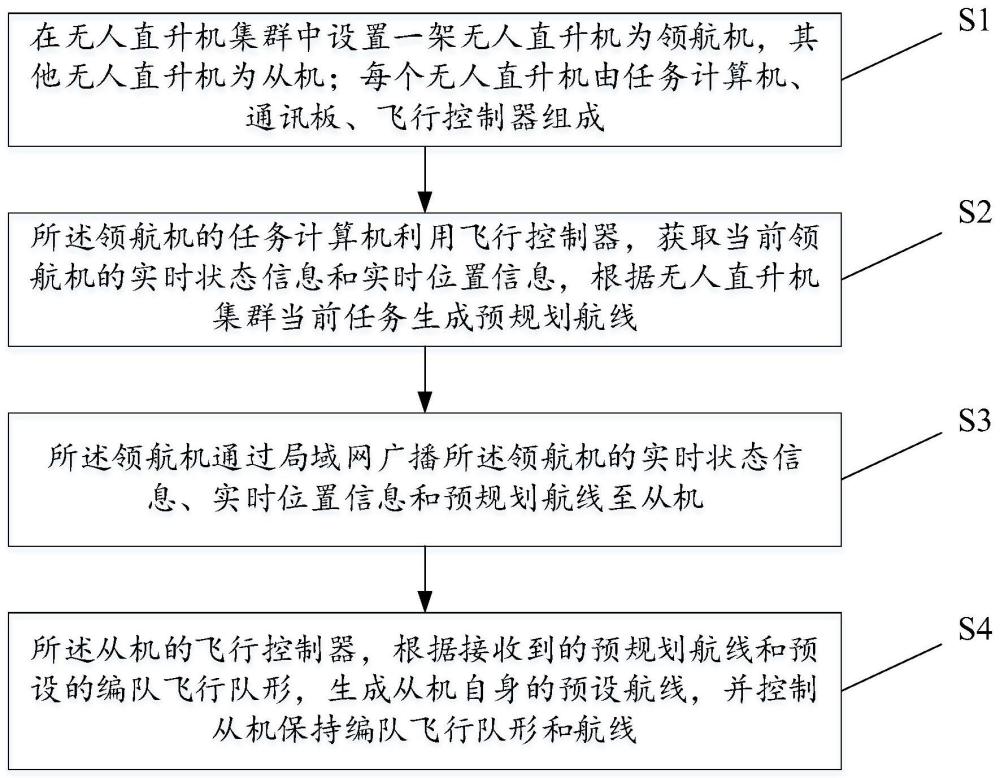
3、s1,在无人直升机集群中设置一架无人直升机为领航机,其他无人直升机为从机;每个无人直升机由任务计算机、通讯板、飞行控制器组成;
4、s2,所述领航机的任务计算机利用飞行控制器,获取当前领航机的实时状态信息和实时位置信息,根据无人直升机集群当前任务生成预规划航线;
5、s3,所述领航机通过局域网广播所述领航机的实时状态信息、实时位置信息和预规划航线至从机;
6、s4,所述从机的飞行控制器,根据接收到的预规划航线和预设的编队飞行队形,生成从机自身的预设航线,并控制从机保持编队飞行队形和航线。
7、作为一种可选的实施方式,本发明实施例第一方面中,所述无人直升机集群中的无人直升机为大型无人直升机;
8、所述大型无人直升机为起飞重量大于500kg,载荷重量大于100kg,续航时间大于7小时的单旋翼飞行器;
9、所述编队飞行队形为任意多边形刚体,无人直升机位置位于所述任意多边形刚体的顶点上。
10、作为一种可选的实施方式,本发明实施例第一方面中,所述通讯板用于在无人直升机集群中组成局域网,通过领航机与从机间的实时通讯,保证所述无人直升机集群保持编队飞行队形和航线。
11、作为一种可选的实施方式,本发明实施例第一方面中,所述领航机的任务计算机利用飞行控制器,根据预设的编队飞行队形生成从机的位置点,并将所述位置点按照序号进行连接。
12、作为一种可选的实施方式,本发明实施例第一方面中,所述从机的飞行控制器,根据接收到的预规划航线和预设的编队飞行队形,生成从机自身的预设航线,并控制从机保持编队飞行队形和航线,包括:
13、s41,所述从机的飞行控制器,根据自身在编队中的位置生成本机的预设航线;
14、s42,所述从机的飞行控制器,控制所述从机自身的线速度保持队形距离;
15、s43,所述从机的飞行控制器,控制所述从机自身的角速度保持预设航线。
16、作为一种可选的实施方式,本发明实施例第一方面中,所述从机的飞行控制器,控制所述从机自身的线速度保持队形距离,包括:
17、所述从机的飞行控制器,控制所述从机自身的线速度为:
18、v′=v+kp(r′-r)
19、其中,r为设定队形中领航机与从机的距离,r′为实际飞行过程中领航机与从机的距离,v为领航机飞行速度,v′为从机自身的线速度,kp为比例系数。
20、作为一种可选的实施方式,本发明实施例第一方面中,所述从机的飞行控制器,控制所述从机自身的角速度保持预设航线,包括:
21、所述从机的飞行控制器,控制所述从机自身的角速度为:
22、
23、其中,v为从机当前线速度,r为切换航线时从机距离目标位置点的距离,θ为前航线与下一条航线的夹角,ω为从机自身的角速度。
24、本发明实施例第二方面公开了一种无人直升机集群的编队巡逻飞行装置,所述装置包括:
25、无人直升机集群设置模块,用于在无人直升机集群中设置一架无人直升机为领航机,其他无人直升机为从机;每个无人直升机由任务计算机、通讯板、飞行控制器组成;
26、领航机规划模块,用于所述领航机的任务计算机利用飞行控制器,获取当前领航机的实时状态信息和实时位置信息,根据无人直升机集群当前任务生成预规划航线;
27、领航机信息广播模块,用于所述领航机通过局域网广播所述领航机的实时状态信息、实时位置信息和预规划航线至从机;
28、从机规划轨迹模块,用于所述从机的飞行控制器,根据接收到的预规划航线和预设的编队飞行队形,生成从机自身的预设航线,并控制从机保持编队飞行队形和航线。
29、作为一种可选的实施方式,本发明实施例第二方面中,所述无人直升机集群中的无人直升机为大型无人直升机;
30、所述大型无人直升机为起飞重量大于500kg,载荷重量大于100kg,续航时间大于7小时的单旋翼飞行器;
31、所述编队飞行队形为任意多边形刚体,无人直升机位置位于所述任意多边形刚体的顶点上。
32、作为一种可选的实施方式,本发明实施例第二方面中,所述通讯板用于在无人直升机集群中组成局域网,通过领航机与从机间的实时通讯,保证所述无人直升机集群保持编队飞行队形和航线。
33、作为一种可选的实施方式,本发明实施例第二方面中,所述领航机的任务计算机利用飞行控制器,根据预设的编队飞行队形生成从机的位置点,并将所述位置点按照序号进行连接。
34、作为一种可选的实施方式,本发明实施例第二方面中,所述从机的飞行控制器,根据接收到的预规划航线和预设的编队飞行队形,生成从机自身的预设航线,并控制从机保持编队飞行队形和航线,包括:
35、s41,所述从机的飞行控制器,根据自身在编队中的位置生成本机的预设航线;
36、s42,所述从机的飞行控制器,控制所述从机自身的线速度保持队形距离;
37、s43,所述从机的飞行控制器,控制所述从机自身的角速度保持预设航线。
38、作为一种可选的实施方式,本发明实施例第二方面中,所述从机的飞行控制器,控制所述从机自身的线速度保持队形距离,包括:
39、所述从机的飞行控制器,控制所述从机自身的线速度为:
40、v′=v+kp(r′-r)
41、其中,r为设定队形中领航机与从机的距离,r′为实际飞行过程中领航机与从机的距离,v为领航机飞行速度,v′为从机自身的线速度,kp为比例系数。
42、作为一种可选的实施方式,本发明实施例第二方面中,所述从机的飞行控制器,控制所述从机自身的角速度保持预设航线,包括:
43、所述从机的飞行控制器,控制所述从机自身的角速度为:
44、
45、其中,v为从机当前线速度,r为切换航线时从机距离目标位置点的距离,θ为前航线与下一条航线的夹角,ω为从机自身的角速度。
46、本发明第三方面公开了另一种无人直升机集群的编队巡逻飞行装置,所述装置包括:
47、存储有可执行程序代码的存储器;
48、与所述存储器耦合的处理器;
49、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面公开的无人直升机集群的编队巡逻飞行方法中的部分或全部步骤。
50、本发明第四方面公开了一种计算机可存储介质,所述计算机可存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明实施例第一方面公开的无人直升机集群的编队巡逻飞行方法中的部分或全部步骤。
51、与现有技术相比,本发明实施例具有以下有益效果:
52、为了有效地进行大型无人直升机编队飞行的任务,本发明提出了一种适用于大型无人直升机编队飞行的方法。该方法指定唯一无人直升机为领航机,领航机生成预规划航线后,将领航机航线、速度、位置等信息广播至其他从机,从机收到航线后根据队形生成自身的航线,之后分别控制无人机线速度使得从机保持队形距离,控制角速度保证无人机在航线内。本发明方法通过无人直升机角速度与线速度分开控制,避免了大型无人机惯性大转向慢的问题,有效地提升大型无人直升机编队的成型速度与编队飞行的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!