随动圆顶智能控制系统及其控制方法
本发明涉及自动化系统,尤其涉及一种随动圆顶智能控制系统及其控制方法。
背景技术:
1、光电望远镜(以下简称望远镜)包含光学机构、调焦机构、成像机构、控制机构等子系统,属于精密观测与测量设备。望远镜通常在晴天、微风、非极端气温的天气条件下使用。但由于强风、阴雨、沙尘等恶劣天气极易对望远镜产生腐蚀,且望远镜一旦安装不能拆卸,所以一般会对每个望远镜配置一个圆顶进行保护,防止望远镜受到不利天气条件的影响。
2、专利申请cn2510897y公开了一种基于电路控制的随动圆顶,主要原理为将望远镜的方位编码器角度值反馈给随动圆顶控制器,再由控制器将随动圆顶角度值设置为与望远镜同方向,即可完成圆顶与望远镜的同步转动。但这种随动圆顶控制方式针对白天的观测任务有如下问题无法解决:(1)望远镜和随动圆顶的体积和重量非常大,其重量高达几百千克至数吨不等,设备安装时无法将望远镜和随动圆顶的方位编码器零点与正北方向重合,并且基于电路控制的随动圆顶通过可编程控制器以及状态显示器的配合无法实现望远镜与随动圆顶的零位对齐,从而使望远镜与随动圆顶的同步转动的偏差较大。(2)传统的随动圆顶是根据望远镜的方位编码器实时反馈值进行引导,如果切换观测计划,如方位角从90°切换到270°,假设望远镜的方位轴转动速度最大为15°/s,圆顶的最大转动速度为5°/s,望远镜约12s转到指定位置,而随动圆顶约36s转到指定位置,也就是说望远镜转动到位后,至少有20s无法观测到目标。(3)传统的随动圆顶无法根据天气变化对是否关闭天窗做出决策,如果在观测过程中出现雨、雪、沙尘等恶劣天气,而天窗没有自动关闭,可能对望远镜产生不可逆的伤害,造成巨大损失。
技术实现思路
1、本发明为解决传统的随动圆顶无法解决望远镜与随动圆顶的零位对齐以及望远镜在切换观测任务之后,随动圆顶不能及时到达指定位置,导致缺失观测数据等问题,提供一种随动圆顶智能控制系统及其控制方法,能够实现望远镜与随动圆顶的零位对齐,并且根据望远镜的下一次的观测任务,能够使随动圆顶及时到达指定位置,避免了观测数据缺失等问题,同时在望远镜的使用过程中,能够避免恶劣天气和太阳直射对望远镜造成损坏。
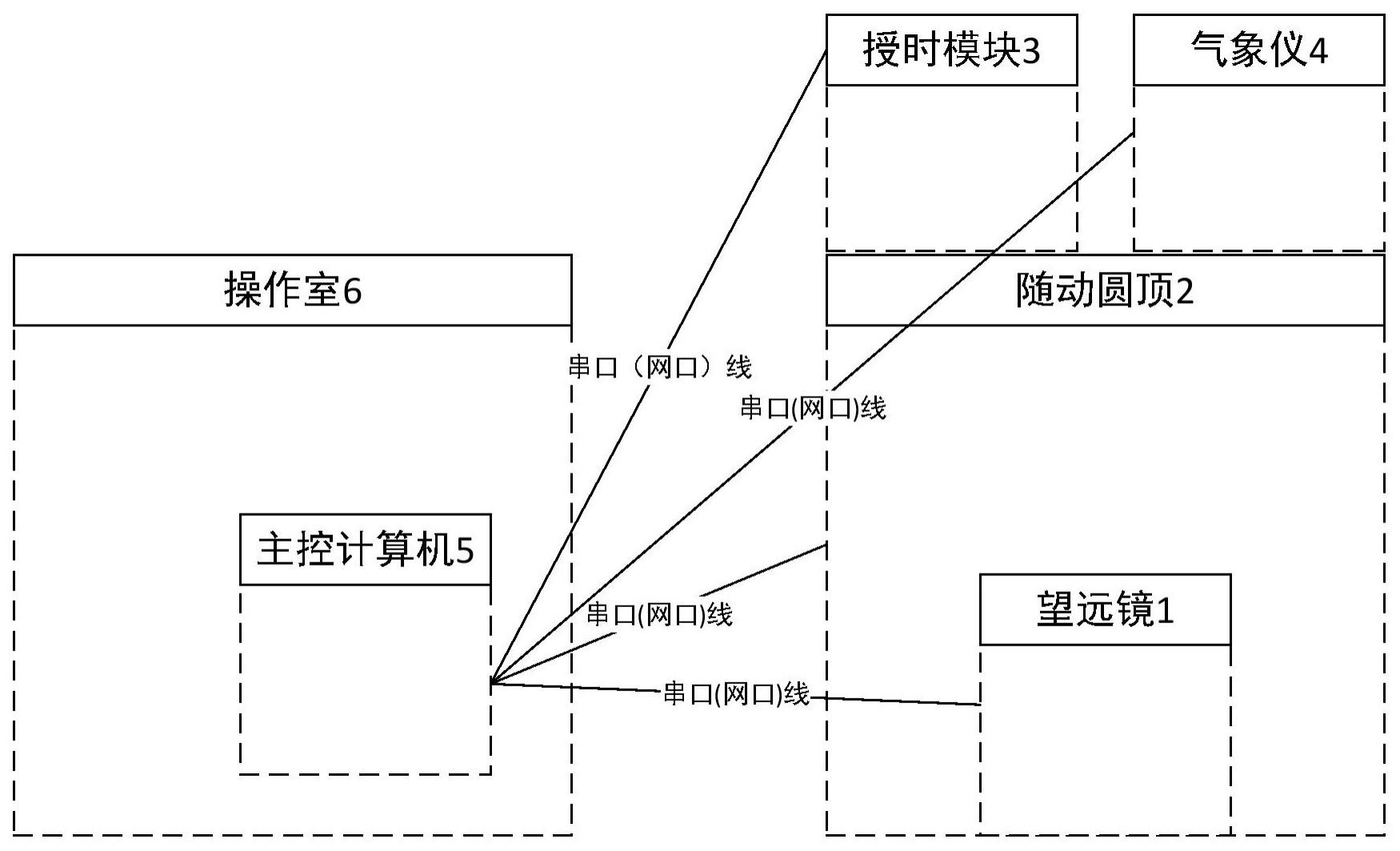
2、本发明提供的随动圆顶智能控制系统,用于实现望远镜与随动圆顶的同步转动,包括气象仪、授时模块、圆顶伺服电机、望远镜伺服电机和主控计算机,其中,
3、气象仪和授时模块安装于随动圆顶的外部,且保证授时模块和气象仪不受遮挡,圆顶伺服电机安装于随动圆顶的内部,望远镜伺服电机安装于望远镜的内部,主控计算机安装于操作室内;
4、气象仪用于检测随动圆顶的外部的气象信息,并实时反馈至主控计算机,主控计算机用于根据气象信息确定是否关闭随动圆顶,授时模块用于将utc时间反馈至主控计算机,主控计算机用于根据utc时间计算望远镜的指向与太阳的夹角,并根据夹角的计算结果设置随动圆顶的天窗狭缝的开启角度,主控计算机根据观测任务向望远镜伺服电机发送方位角引导指令和俯仰角引导指令,同时主控计算机向圆顶伺服电机发送方位角引导指令,望远镜伺服电机用于根据方位角引导指令和俯仰角引导指令调节望远镜转动的方位角和俯仰角,同时圆顶伺服电机用于根据方位角引导指令调整随动圆顶转动的方位角,实现望远镜与随动圆顶的同步转动。
5、优选地,还包括圆顶编码器和望远镜编码器,圆顶编码器安装于随动圆顶的内部,望远镜编码器安装于望远镜的内部,圆顶编码器用于将随动圆顶转动的方位角反馈至主控计算机,望远镜编码器用于将望远镜转动的方位角和俯仰角反馈至主控计算机,主控计算机根据随动圆顶转动的方位角以及望远镜转动的方位角和俯仰角监控随动圆顶和望远镜的同步转动偏差。
6、优选地,将望远镜的方位角0°与随动圆顶的方位角0°均设置为北极方向,以确保望远镜指向任何方位角,随动圆顶均保持与望远镜的同步转动。
7、优选地,操作室置于随动圆顶的外部或内部。
8、优选地,主控计算机与授时模块、气象仪、圆顶伺服电机、望远镜编码器、圆顶编码器和望远镜伺服电机之间的通信连接方式包括串口线和网口线。
9、本发明提供的随动圆顶智能控制方法,利用随动圆顶智能控制系统实现,具体包括如下步骤:
10、s1:搭建随动圆顶智能控制系统。
11、s2:主控计算机的定时器发送定时触发信号,主控计算机根据定时触发信号向气象仪发送气象查询指令,并加载观测任务。
12、s3:主控计算机根据气象仪反馈的气象信息和授时模块反馈的utc时间调整天窗狭缝的开启角度,并根据望远镜的工作状态调整随动圆顶转动的方位角。
13、s4:主控计算机的定时器再次发出定时触发信号,重复步骤s2-s3,实现对随动圆顶的转动角度以及随动圆顶的天窗狭缝的开启角度的实时调整。
14、优选地,步骤s3具体还包括如下步骤:
15、s31:若气象仪向主控计算机反馈的气象信息为恶劣,则主控计算机通过圆顶伺服电机关闭天窗,执行步骤s4,否则执行步骤s32。
16、s32:主控计算机根据授时模块反馈的utc时间计算望远镜的指向与太阳的夹角,若夹角小于15°,则主控计算机通过圆顶伺服电机关闭天窗,执行步骤s4,否则执行步骤s33。
17、s33:若夹角大于40°,则主控计算机通过圆顶伺服电机将天窗全部打开,执行步骤s35,否则执行步骤s34。
18、s34:若夹角介于15°~40°之间,则通过下式计算天窗狭缝的开启角度,并根据下式的计算结果通过主控计算机控制圆顶伺服电机调整天窗狭缝的开启角度:
19、θ=5°+(30°-5°)÷(40°-15°)×(φ-15°);
20、其中,5°为天窗狭缝的最小开启角度,30°为天窗狭缝的最大开启角度,15°和40°均为望远镜的指向与太阳的夹角,φ为望远镜的指向与太阳夹角,θ为天窗狭缝的开启角度。
21、s35:检查望远镜的工作状态,若望远镜正在执行观测任务,则主控计算机根据观测任务向望远镜伺服电机发送方位角引导指令和俯仰角引导指令,同时主控计算机向圆顶伺服电机发送方位角引导指令,望远镜伺服电机根据方位角引导指令和俯仰角引导指令调整望远镜转动的方位角和俯仰角,圆顶伺服电机根据方位角引导指令调整随动圆顶转动的方位角,执行步骤s4,否则执行步骤s36。
22、s36:若望远镜正在等待执行下一次的观测任务,则主控计算机在下一次的观测任务的执行时间前30秒,将下一次的观测任务的方位角引导指令发送至圆顶伺服电机,以引导随动圆顶转动至望远镜在下一次观测任务的起始方位,执行步骤s4,否则执行步骤s37。
23、s37:若望远镜当前无观测任务,则执行步骤s4。
24、与现有技术相比,本发明能够取得如下有益效果:
25、(1)本发明提供的随动圆顶智能控制系统通过将望远镜的方位0°与随动圆顶的方位0°均设置为北极方向,以确保望远镜指向任何方位角,随动圆顶均保持与望远镜实现同步转动,降低了望远镜和随动圆顶的安装难度,适用于多种望远镜方位轴编码器的设计模式。
26、(2)本发明提供的随动圆顶智能控制系统利用授时模块输出的utc时间,并通过计算望远镜指向与太阳夹角设置天窗狭缝的开启角度,使随动圆顶具有较好的杂散光抑制效果和太阳直射保护效果。
27、(3)本发明提供的随动圆顶智能控制系统能够根据下一次的观测任务的位置对随动圆顶进行提前调整,将随动圆顶和望远镜的转动速度差所导致的无效观测时间大幅缩短。
28、(4)本发明提供的随动圆顶智能控制系统通过气象仪反馈的气象数据使随动圆顶在恶劣天气的情况下对望远镜具有较好的保护效果。
- 还没有人留言评论。精彩留言会获得点赞!