领导-跟随非线性多智能体系统的群体共识控制方法
本发明属于智能体协同控制,具体的为一种领导-跟随非线性多智能体系统的群体共识控制方法。
背景技术:
1、集群现象广泛存在于自然界与人类社会中,将集群中的个体看做一个智能体,则构成了多智能体系统。即多智能体系统(multi-agent systems,mass)是由多个结构简单,具有一定感知、计算、通信和执行能力的单个智能体组成。在多智能体系统中,智能体间通过信息共享、协调合作来共同执行单个智能体所无法完成的复杂任务。多智能体系统协同控制在智能电网、智能制造、无人机编队等领域具有广阔应用前景,成为当前的一大研究热点。以智能制造领域为例,生产线上人机物之间通过相互协作,可以实现智能协同生产及离散制造过程柔性化。
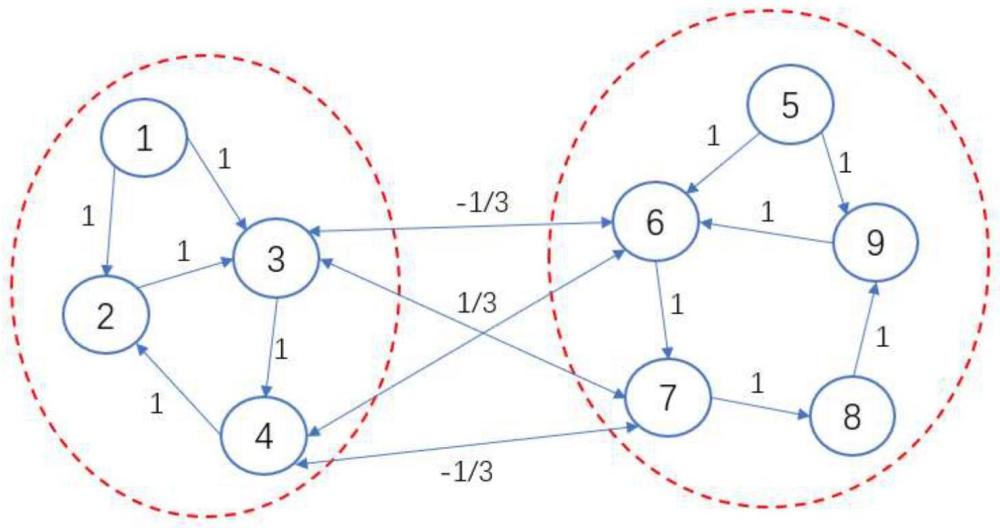
2、单组多智能体是收敛到单一的一个状态值,而很多情况下有多个任务要同时完成,单组多智能体无法满足实际需求。群体共识作为多智能体系统一致性的延伸,它将多智能体系统划分为不同的子网络,信息交换不仅存在于同一子网络的智能体之间,还存在于不同的子网络之间,最终系统收敛到多个状态。目前已有许多关于多智能体系统群体共识问题的研究,在大部分研究中,智能体间信息传递是双向的,且智能体模型是线性的。而实际生活中,信息单向传递的非线性系统更为普遍。同时对于一个复杂的系统,仅仅依靠智能体之间的信息交换很难达成群体共识,外部控制也非常重要。另外,随着网络技术的发展,多智能体系统容易遭受网络攻击的威胁,同时当组间或组内智能体间距离变远时,可能会出现网络衰弱的状况,这会导致系统已经达到的群体共识状态会遭到破坏。对此,我们提出了一种自适应控制协议,同时,设计了一种自适应神经网络状态观测器,通过该状态观测器恢复受干扰的信号,使多智能体系统重新达到群体共识。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种领导-跟随非线性多智能体系统的群体共识控制方法,通过设计的控制协议和自适应神经网络状态观测器恢复受干扰的信号,使群体共识遭到破坏的多智能体系统的重新达到群体共识。
2、为达到上述目的,本发明提供如下技术方案:
3、一种领导-跟随非线性多智能体系统的群体共识控制方法,包括:
4、步骤一:设定智能体的收敛目标,将群组多智能体系统中收敛目标相同的智能体划分到一个子系统中,得到若干个子系统;在每个子系统中选择一个智能体作为领导者智能体,其他智能体作为跟随者智能体;
5、步骤二:在智能体的活动空间中建立全局坐标系,将每个智能体看作一个服从单积分器运动模型的质点,建立群组多智能体系统中每个智能体的非线性动力学模型;
6、步骤三:建立智能体之间的通信连接网络;
7、步骤四:设计控制协议,初始化每个智能体状态值和状态观测值;
8、步骤五:通过各个智能体当前的状态值与收敛目标计算相应的控制协议,各智能体执行下一步动作;
9、步骤六:利用智能体当前的状态与观测值计算自适应律,并设计自适应状态观测器;
10、步骤七:利用状态观测器得到执行动作后的每个智能体的状态值。
11、进一步,所述步骤二中,领导者智能体的非线性动力学模型为:
12、
13、其中,表示第s个子系统中的领导者智能体状态;表示对时间的一阶导数;t表示时间步;js表示第s个子系统中的智能体集合;
14、跟随者智能体的非线性动力学模型为:
15、
16、其中,xi(t)表示第i个智能体的状态;表示xi(t)对时间的一阶导数;f(t,xi(t))表示第i个智能体的非线性部分;b表示控制输入矩阵;ui(t)表示第i个智能体的控制参数;且
17、xi(t)=[xi,1(t),xi,2(t),…,xi,l(t),…,xi,r(t)]t∈rn
18、f(t,xi(t)):=[f1(t,xi(t)),f2(t,xi(t)),...,fl(t,xi(t)),...,fr(t,xi(t))]t∈rn
19、fl(t,xi(t))=fl(t,xi,1(t),xi,2(t),...,xi,l(t),...,xi,r(t)),ui(t)∈rg
20、其中,xi,l(t)表示智能体i状态的第l项;fl(t,xi(t))表示第i个智能体的非线性部分的第l项;l=1,2,3…,r,r表示第s个子系统中的智能体的数量;rn表示维数为n的实数;rg表示维数为g的实数。
21、进一步,所述步骤四中,控制协议为:
22、ui(t)=φi(t)hiei
23、φi(t)定义如下:
24、
25、其中φi,p(t)定义如下:
26、
27、其中,hi∈rg×r表示具有g行r列维度的矩阵;ei表示智能体i的状态差;ei,k表示智能体i第k项的状态差;ωi,p表示大于或等于1的常数;ξi,p*和ei,p*分别表示向量ξi*和向量ei*的第p个元素;是对δix的估计值,δix表示一个未知的正常数;xis,k表示第s个子系统中智能体i第k项的状态值;ρ表示是一个大于零的常数;且满足:
28、
29、向量ξi*和向量ei*分别表示为:
30、
31、ei*:=hiei
32、其中,αji表示通信网络中智能体i和j之间的通信权值;m表示群组多智能体系统中的智能体的总数量;
33、的导数定义为:
34、
35、误差方程定义为:
36、
37、其中,ei,s(t)表示s子系统中第i个智能体与邻近智能体的状态差;ci表示跟随者i与子系统中领导者连接权值;x0,s代表第s个子系统的领导者的状态值。
38、进一步,所述的步骤六中,设计的自适应观测器为:
39、
40、其中,表示xj(t)的估计值;表示的导数;cj为一个大于零的正数;表示信号衰弱率的估计值;b表示控制输入矩阵;uj表示第j个智能体的控制参数;表示自适应观测增益;且:
41、当ηj,k≠0时:
42、
43、当ηj,k=0时:
44、
45、
46、其中,lj,k表示自适应观测增益lj的第k项;ηj,k表示智能体j第k项受到信号衰弱;表示对ηj,k的估计值;表示神经网络权值的估计值;表示神经网络误差的估计值;表示神经网络基函数;yj,k(t)表示受到影响后的状态值;表示对yj,k(t)的估计;表示智能体j受到信号衰弱;表示对的估计值;xj,k(t)表示智能体j状态值的第k项;μ和ρ表示极小的一个正数。
47、进一步,所述步骤七中,利用状态观测器得到每个智能体的状态值的方法步骤为:
48、71)构建自适应神经网络,确定自适应神经网络的参数μi、ηi和q;其中,ci表示μi表示状态观测器i神经网络中高斯基函数宽度;ηi表示高斯基函数中心值;q表示神经网络的节点数;
49、72)初始化wj、和ηj;wj表示神经网络权值;表示神经网络误差上界;ηj表示智能体所受的信号衰弱值;
50、73)以智能体的状态值作为输入,利用自适应神经网络逼近未知非线性方程:
51、
52、其中,δj为一个大于零的常数;ψ(xj)表示……;wj=[wj1,...,wji,...,wjq]t为最优神经网络权值向量,wji表示第i神经网络节点的权重,i=1,2,...,q,q>1为神经网络的节点数;代表模糊基函数向量;∈j(xj)被选为高斯方程,形式如下:
53、
54、其中,表示关于智能体xj状态观测器中神经网络基函数的第l项;μjl表示第l项基函数中的宽度;ηl表示第l项基函数中的中心值;
55、得到未知非线性方程δjψ(xj)的近似解;
56、74)利用通信连接网络的干扰信号yi(t),计算观测矩阵li;
57、75)将δjψ(xj)的近似解以及观测矩阵lj代入到状态观测器内,得到恢复的状态值
58、76)判断是否等于零:若是,则以作为当前的智能体状态值xi(t);若否,则执行步骤77);
59、77)利用状态值更新wj、和
60、
61、
62、
63、其中,αj,βj,γj,k,cj,k均为大于零的常数;lj,k表示观测矩阵的第k项;xj,k(t)表示智能体j状态值的第k项;表示对xj,k(t)估计值;
64、78)循环执行步骤73)。
65、本发明的有益效果在于:
66、多智能体系统在受到信号衰弱或者网络攻击的影响时,已经达到共识多智能体系统会遭到破坏,本发明领导-跟随非线性多智能体系统的群体共识控制方法,通过设计的控制协议,使得不同组的非线性智能体最终收敛到各组领导者的状态;通过设计自适应状态观测器,能够恢复受到网络攻击或衰弱的信号,从而使多智能体系统重新收敛一致;最终使群体共识遭到破坏的多智能体系统的重新达到群体共识。
- 还没有人留言评论。精彩留言会获得点赞!