一种给汤机运行的控制方法及装置与流程
本技术涉及给汤机运行控制,特别是涉及一种给汤机运行的控制方法及装置。
背景技术:
1、现阶段中,给汤机只能在几个特定的位置之间,横轴、纵轴配合走直线运动,且给汤机的汤勺的运动是独立的,另外,安全区范围只能由横轴和纵轴限制形成一个矩形区域,使得路径设定比较死板,安全区范围又太宽泛,导致空间利用率低,不便于后续增添别的设备。
2、同时,有些机械部件不得不安装在给汤机的安全区内,比如引流漕、料筒、保温炉等,因此,又需要设定各种限制互锁条件,导致后续调试不便。并且,当设备使用人员不得不在给汤机的安全区加装设备时,不仅需要临时修改程序,而且需要调试新加的互锁条件,增加了安装风险和调试风险。
3、其次,汤勺的转轴相对于给汤机的其他轴比较独立,没有与其他轴整体考虑,不便于对注汤位置的定点注汤。
技术实现思路
1、为解决现有技术中存在的问题,本技术实施例提供了一种给汤机运行的控制方法及装置。
2、第一方面,本技术实施例提供了一种给汤机运行的控制方法,所述方法包括:
3、获取路径点,所述路径点包括行径点和障碍点,所述行径点为汤勺运行时能够经过的点,所述障碍点为障碍物所遮盖的区域内的点;
4、基于所述路径点,生成预备路径,所述预备路径为所述汤勺的运行路线;
5、判断所述预备路径为首次执行时,控制所述汤勺进入调试模式,并沿所述预备路径运行。
6、优选的,所述获取路径点,具体包括:
7、获取所述汤勺的初始运行图像和所述汤勺的实时运行图像;
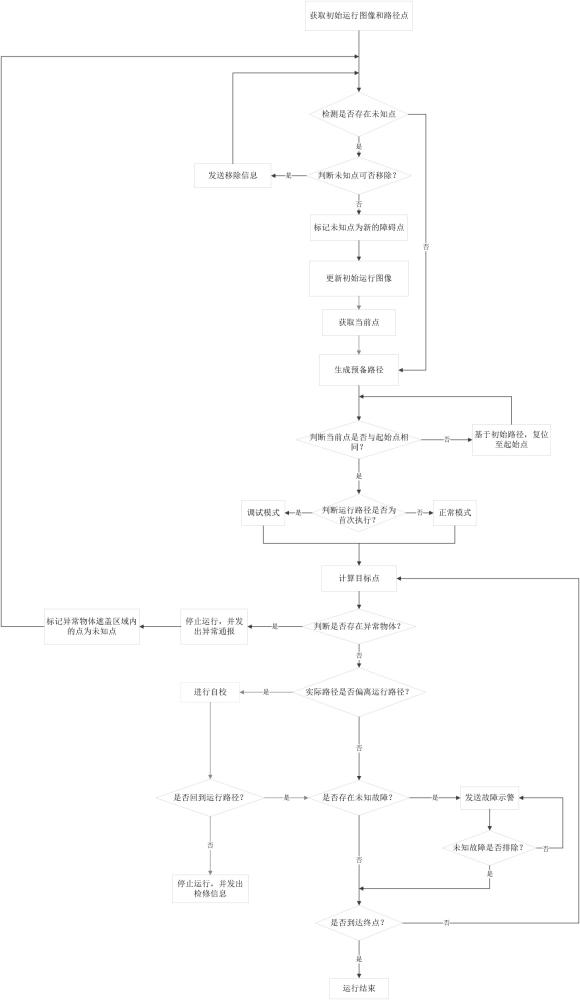
8、基于所述初始运行图像,对比判断所述实时运行图像中是否存在未知点,所述未知点为未预先录入的所述障碍物对应的覆盖区域内的点:
9、若所述实时运行图像中不存在所述未知点,则基于所述路径点,生成所述预备路径;
10、若所述实时运行图像中存在所述未知点,则判断所述未知点可否移除:
11、若可移除,则发送移除信息,并重新检测是否存在所述未知点;
12、若不可移除,则标记所述未知点为新的所述障碍点,并更新所述障碍点和所述初始运行图像;基于所述障碍点和所述初始运行图像,更新所述行径点;基于更新后的所述障碍点和所述行径点,生成所述预备路径。
13、优选的,所述生成所述汤勺的预备路径,具体包括:
14、获取当前点,所述当前点为所述汤勺的当前位置;
15、预定义所述汤勺的起始点和所述汤勺的作业终点;
16、基于所述当前点、所述起始点、所述作业终点和所述路径点,生成所述汤勺的所述预备路径,所述预备路径包括初始路径和运行路径;
17、其中,所述初始路径为所述汤勺从所述当前点复位至所述起始点的运行路线;
18、所述运行路径为所述汤勺从所述起始点运行至所述作业终点的运行路线。
19、优选的,所述沿所述预备路径运行,具体包括:
20、s21:判断所述当前点和所述起始点是否相同:
21、s211:若所述当前点和所述起始点不同,则控制所述汤勺从所述当前点沿所述初始路径运行,并返回步骤s21;
22、s212:若所述当前点和所述起始点相同,则控制所述汤勺沿所述运行路径运行。
23、优选的,所述判断所述预备路径为首次执行时,控制所述汤勺进入调试模式,具体包括:
24、获取所述汤勺前期的运行记录,并比对判断当前所述运行路径是否为首次执行:
25、若所述运行路径为首次执行,则进入调试模式,以第一速度驱动所述汤勺沿所述运行路径运行;
26、若所述运行路径不为首次执行,则进入正常模式,以第二速度驱动所述汤勺沿所述运行路径运行。
27、优选的,还包括,预定义标准速度;所述第一速度小于所述标准速度,所述第二速度不小于所述标准速度。
28、优选的,在所述汤勺以所述第一速度或所述第二速度的运行过程中,还包括:
29、获取所述汤勺的实时动作趋势、实时运行点和所述运行速度;
30、基于所述实时动作趋势,确定所述汤勺的运动方向;
31、基于所述实时运行点、所述运动方向、所述运行速度以及所述运行路径,计算目标点,所述目标点为距离所述实时运行点最近的下一个所述行径点;
32、控制所述汤勺向所述目标点运行;
33、判断所述汤勺是否到达所述作业终点:
34、当所述汤勺未到达所述作业终点时,基于所述实时运行点、所述运动方向、所述运行速度以及所述运行路径,计算下一个所述目标点;
35、当所述汤勺到达所述作业终点时,控制所述汤勺停止,并输出运行结束信息。
36、优选的,在控制所述汤勺向所述目标点运行的过程中,具体包括:
37、获取所述初始运行图像,并储存各障碍物的障碍信息;
38、获取所述实时运行图像,并与所述初始运行图像比对,判断是否存在异常物体:
39、若存在所述异常物体,则停止所述汤勺运行,并发出异常通报;标记所述异常物体遮盖区域内的点为所述未知点;
40、若不存在所述异常物体,则控制所述汤勺继续运行;
41、获取所述实时运行点和所述运行路径,计算实时距离;
42、获取预设的安全距离,计算所述安全距离和所述实时距离的距离差,判断实际路径是否偏离所述运行路径:
43、若所述距离差不小于零,则判定所述实际路径未偏离所述运行路径,控制所述汤勺继续运行;
44、若所述距离差小于零,则判定所述实际路径已偏离所述运行路径,进行自校;
45、其中,所述实时距离为所述实时运行点与所述运行路径之间的最小距离;
46、所述安全距离为所述实时运行点基于所述运行路径可接受的单侧偏移量的最大值;
47、所述实际路径为所述汤勺运行时的实际运行路线;
48、所述障碍信息包括所述障碍物所覆盖的区域内的点以及形态特征;
49、所述异常物体为对比出的有区别于所述障碍信息的物体。
50、优选的,所述自校所述实际路径,具体包括:
51、获取距离差值,所述距离差值为所述距离差的绝对值;
52、控制所述汤勺向所述运行路径运行,运行距离与所述距离差值一致;
53、计算校准距离,所述校准距离为校准后所述汤勺与所述运行路径之间的距离;
54、基于所述校准距离和所述安全距离,判断所述汤勺是否回到所述运行路径:
55、若所述校准距离不大于所述安全距离,判定所述汤勺回到所述运行路径,控制所述汤勺继续向所述目标点运行;
56、若所述校准距离大于所述安全距离,判定所述汤勺未回到所述运行路径,控制所述汤勺停止运行,并发出检修信息。
57、第二方面,本技术的实施例提供了一种给汤机运行的控制装置,所述装置包括:
58、提取模块,用于获取路径点,所述路径点包括行径点和障碍点,所述行径点为汤勺运行时能够经过的点,所述障碍点为障碍物所遮盖的区域内的点;
59、生成模块,用于基于所述路径点,生成预备路径,所述预备路径为所述汤勺的运行路线;
60、运行模块,用于判断所述预备路径为首次执行时,控制所述汤勺进入调试模式,并沿所述预备路径运行。
61、本发明的有益效果为:本发明能够利用预设的路径点自动生成汤勺的预备路径,并且具有调试功能,在正常运行之前自动进行调试,并通过自主设定安全范围,使厂内的安装空间能够被充分利用。
62、本发明还能在路线偏移时,进行自动校准,避免设备损坏。
63、本发明搭载全局图像监测系统,对给汤机的运行进行实时监控,不再需要操作人员实时监控。且图像监测设备能够通过机器学习识别出区别于已知设备的异常物体,并做出相应的警示和操作。
- 还没有人留言评论。精彩留言会获得点赞!