一种掘锚一体机协同控制数字孪生构建方法及系统与流程
本发明涉及掘锚一体机协同控制,特别是指一种掘锚一体机协同控制数字孪生构建方法及系统。
背景技术:
1、掘锚一体机是一种稳定及中等稳定顶板条件下的掘进、锚护为一体的煤巷巷道开掘、支护设备。与传统的巷道开掘设备相比,其优势在于开掘的同时可进行支护作业,正在意义实现掘进和支护平行作业。
2、然而,掘锚一体机更多的是进行装备的开发、制造工艺的改进和优化,对于如何高效进行截割、支护作业未进行深入研究,更多是利用人员数量在设备上同时操作来发挥掘锚一体机的作用。这样会产生劳动密集型作业,人员处在高粉尘、淋水等恶劣环境中,其作业效率不高,对人身伤害较大,同时多机构由人员控制,其不确定危险因数较多。
技术实现思路
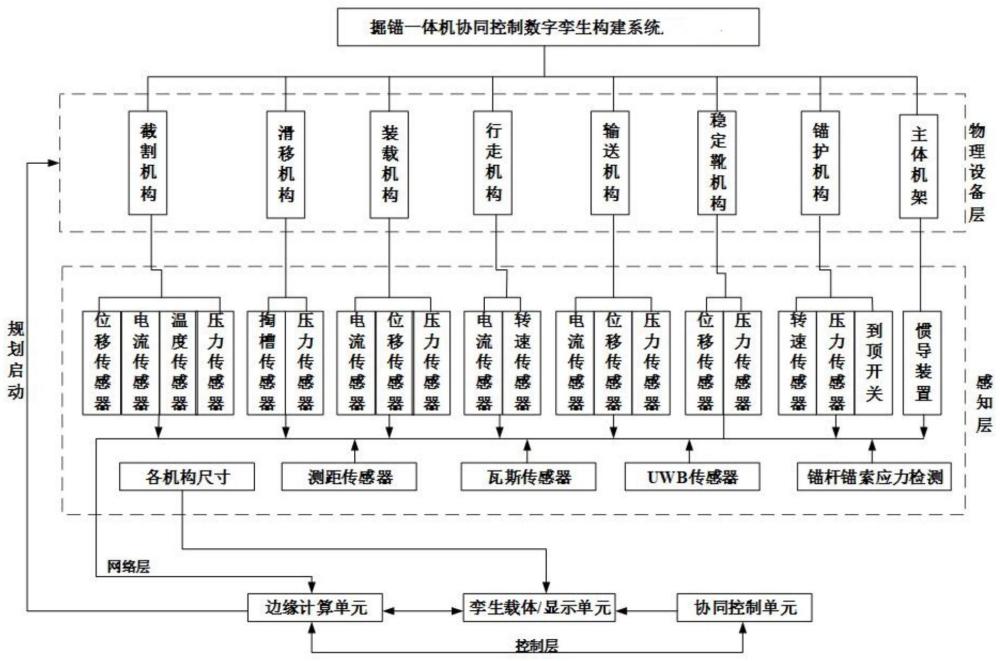
1、本发明要解决的技术问题是提供一种掘锚一体机协同控制数字孪生构建方法及系统,将掘锚一体机执行机构在上位机进行一对一孪生,形成虚实可控的掘锚一体机,通过传感器采集掘锚一体机的相关整机数据、环境信息实现虚拟状态下的掘锚一体机在线控制。通过对截割、支护工艺分析,截割掘锚一体机各机构功能,形成一套多机构协同控制机理,实现掘锚一体机多机构协同控制,多机构联动控制,多机构顺序控制,通过最优控制算法,实现掘锚一体机时间、空间的最优控制策略。
2、为解决上述技术问题,本发明的技术方案如下:
3、第一方面,一种掘锚一体机协同控制数字孪生构建方法,所述方法包括:
4、获取掘锚一体机机构运动特征、功能以及结构信息;
5、通过传感器获取掘锚一体机机构的截割头功率以及转矩;
6、根据掘锚一体机机构运动特征、功能、结构信息、截割头功率以及转矩,建立多机构孪生体;
7、根据多机构孪生体,建立掘锚一体机机构感知系统;
8、根据掘锚一体机机构感知系统,并利用边缘计算方法,实时进行数据处理,以得到掘锚一体机的状态和工作结果;
9、根据掘锚一体机的状态和工作结果,将掘锚一体机的三维模型与传感器数据进行关联,以得到关联信息;
10、对所述关联信息进行处理和分析,筛选出最优的控制方案;
11、根据最优的控制方案,对掘锚一体机进行协同控制。
12、进一步的,根据掘锚一体机机构运动特征、功能、结构信息、截割头功率以及转矩,建立多机构孪生体,包括:
13、获取截割头功率以及转矩信息,根据截割头功率以及转矩信息,以及截割头的半径及截齿尺寸,构建截割头三维模型;
14、获取悬臂驱动油缸的悬臂俯仰角、偏航角以及液压压力,根据悬臂俯仰角、偏航角、液压压力以及悬臂的尺寸,构建悬臂驱动油缸三维模型;将截割头三维模型以及悬臂驱动油缸三维模型与传感器数据关联,以形成截割头数字孪生体和悬臂数字孪生体;
15、获取滑移机构的推移油缸的推进量和液压压力,根据推进量、液压压力以及滑移机构的尺寸测量,构建滑移机构三维模型;将滑移机构三维模型的尺寸与传感器数据关联,以形成推移机构的数字孪生体;
16、获取装载机构的功率和转矩,根据装载机构的功率、转矩以及对装载机构尺寸和装载,构建装载机构三维模型;将装载机构三维模型与传感器数据关联,以形成装载机构数字孪生体;
17、获取行走机构的行走速度、行进里程以及电流,根据行走速度、行进里程以及电流构建行走机构三维模型;将行走机构三维模型与变频器数据关联,以形成行走机构数字孪生体;
18、获取输送机构的速度,根据输送机构的速度以及输送机构的尺寸,构建输送机构三维模型,将输送机构三维模型与传感器数据关联,以形成输送机构数字孪生体;
19、获取锚护机构的空间位置以及液压压力;根据锚护机构的空间位置、液压压力以及锚护机构尺寸,构建锚护机构三维模型;将锚护机构三维模型与传感器数据关联,以形成锚护机构数字孪生体;
20、获取掘锚一体机在巷道位置,根据掘锚一体机在巷道位置以及主体机架尺寸,构建掘锚一体机三维模型;将掘锚一体机三维模型与传感器数据关联,以形成主体机架数字孪生体。
21、进一步的,根据多机构孪生体,建立掘锚一体机机构感知系统,包括:
22、根据多机构的属性和特征,获取掘锚一体机各机构位置和运行状态数据;
23、获取巷道内气体以及温湿度以及液压系统的运行状态;
24、根据掘锚一体机各机构位置、运行状态数据、巷道内气体以及温湿度以及液压系统的运行状态,建立掘锚一体机机构感知系统。
25、进一步的,根据掘锚一体机机构感知系统,并利用边缘计算方法,实时进行数据处理,以得到掘锚一体机的状态和工作结果,包括:
26、通过传感器获取的数据传输至边缘计算设备;
27、通过边缘计算设备进行数据处理,以获得处理结果;
28、将所述处理结果输出,以得到掘锚一体机的状态和工作结果。
29、进一步的,根据掘锚一体机的状态和工作结果,将掘锚一体机的三维模型与传感器数据进行关联,以得到关联信息,包括:
30、获取掘锚一体机的三维模型;
31、将传感器数据的位置信息与三维模型的位置进行匹配,将力传感器数据与模型中的受力部位进行对应,以得到关联结果;
32、根据关联结果,提取出关联信息。
33、进一步的,通过边缘计算设备进行数据处理,以获得处理结果,包括:
34、将从传感器获取的原始数据传输到边缘计算设备;
35、在边缘计算设备上对传输的原始数据进行预处理;
36、根据预处理后的数据,在边缘计算设备上根据具体的任务和目标,进行数据分析和处理;
37、边缘计算设备在预设的时间内完成数据处理并输出结果。
38、进一步的,对所述关联信息进行处理和分析,筛选出最优的控制方案,包括:
39、对关联信息进行预处理,以得到预处理数据;
40、根据关联信息的特点和目标,从所述预处理数据中进行特征提取,以得到关键特征参数;
41、根据所述关键特征参数,进行数据分析和建模,分析关联信息的规律和趋势,并建立相应的数学模型;
42、根据所述数学模型,以及预设的目标和约束条件,评估和比较不同的控制方案,并筛选出最优的控制方案。
43、第二方面,一种掘锚一体机协同控制数字孪生构建系统,包括:
44、获取模块,用于获取掘锚一体机机构运动特征、功能以及结构信息;通过传感器获取掘锚一体机机构的截割头功率以及转矩;根据掘锚一体机机构运动特征、功能、结构信息、截割头功率以及转矩,建立多机构孪生体;根据多机构孪生体,建立掘锚一体机机构感知系统;
45、处理模块,用于根据掘锚一体机机构感知系统,并利用边缘计算方法,实时进行数据处理,以得到掘锚一体机的状态和工作结果;根据掘锚一体机的状态和工作结果,将掘锚一体机的三维模型与传感器数据进行关联,以得到关联信息;对所述关联信息进行处理和分析,筛选出最优的控制方案;根据最优的控制方案,对掘锚一体机进行协同控制。
46、第三方面,一种计算设备,包括:
47、一个或多个处理器;
48、存储系统,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述方法。
49、第四方面,一种计算机可读存储介质,所述计算机可读存储介质中存储有程序,该程序被处理器执行时实现上述方法。
50、本发明的上述方案至少包括以下有益效果:
51、本发明的上述方案,将掘锚一体机执行机构在上位机进行一对一孪生,形成虚实可控的掘锚一体机,通过传感器采集掘锚一体机的相关整机数据、环境信息实现虚拟状态下的掘锚一体机在线控制。通过对截割、支护工艺分析,截割掘锚一体机各机构功能,形成一套多机构协同控制机理,实现掘锚一体机多机构协同控制,多机构联动控制,多机构顺序控制,通过最优控制算法,实现掘锚一体机时间、空间的最优控制策略。
- 还没有人留言评论。精彩留言会获得点赞!