一种天线跟踪指令站方法、系统、设备及可读存储介质与流程
本技术涉及飞行器制导控制领域,具体涉及一种天线跟踪指令站方法、系统、设备及可读存储介质。
背景技术:
1、天线跟踪与天线指令站控制是飞行器飞行中遥测、控制的重要组成部分,天线跟踪和控制的准确程度、可靠程度直接关系到通讯质量。目前国内外对天线跟踪指令站的研究主要包括两个方面:一方面通过天线技术提升对指令站的跟踪与捕获,基于当前飞行器位置、校正后天线姿态以及运动信息生成天线扫描波数控制指令,以实现对指令站的跟踪;另一方面则是根据当前飞行器姿态与位置信息以及天线转轴运动包络方位筛选目标指令站指向,并在运动过程中实施指向调整。
2、传统飞行器的天线跟踪指令站主要依靠射频天线模块,即在飞行过程中将制导稳定控制与天线约束分开,全权交予天线模块处理;然而对于存在大角度机动的飞行器和在地面指令站布设方位不佳的情况下,若仅仅依靠天线模块算法,则难以保证信号的可靠。因此,如何保证天线对指令站的可靠跟踪是目前亟需解决的问题。
技术实现思路
1、本技术提供一种天线跟踪指令站方法、系统、设备及可读存储介质,可以解决现有技术中存在的难以保证天线对指令站的可靠跟踪的技术问题。
2、第一方面,本技术实施例提供一种天线跟踪指令站方法,包括以下步骤:
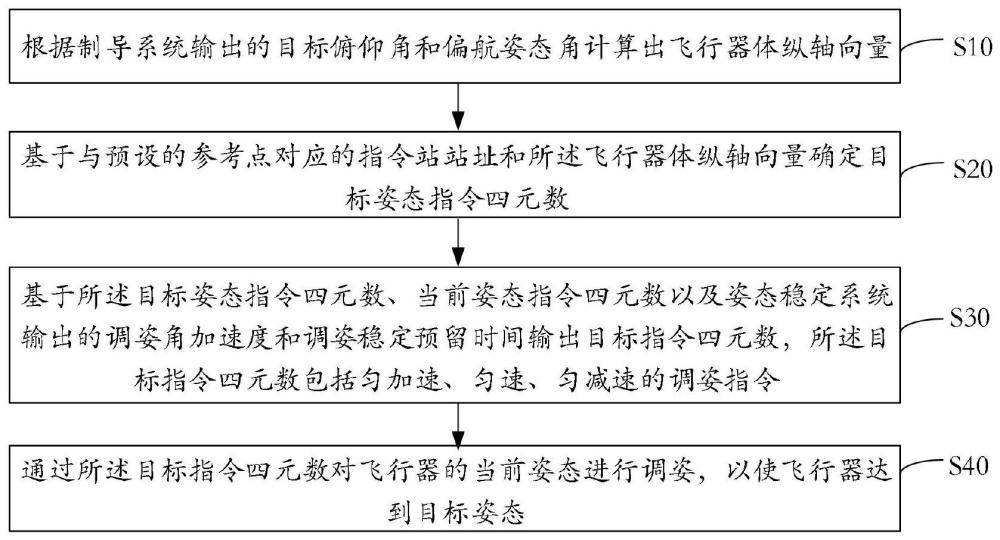
3、根据制导系统输出的目标俯仰角和偏航姿态角计算出飞行器体纵轴向量;
4、基于与预设的参考点对应的指令站站址和所述飞行器体纵轴向量确定目标姿态指令四元数;
5、基于所述目标姿态指令四元数、当前姿态指令四元数以及姿态稳定系统输出的调姿角加速度和调姿稳定预留时间输出目标指令四元数,所述目标指令四元数包括匀加速、匀速、匀减速的调姿指令;
6、通过所述目标指令四元数对飞行器的当前姿态进行调姿,以使飞行器达到目标姿态。
7、结合第一方面,在一种实施方式中,所述基于与预设的参考点对应的指令站站址和所述飞行器体纵轴向量确定目标姿态指令四元数,包括:
8、将所述与预设的参考点对应的指令站站址转换为发射惯性系下的指令站站址,并根据所述发射惯性系下的指令站站址计算出飞行器体质心与指令站站址间的连线向量;
9、根据所述飞行器体纵轴向量和所述连线向量计算出目标姿态指令四元数。
10、结合第一方面,在一种实施方式中,所述基于所述目标姿态指令四元数、当前姿态指令四元数以及姿态稳定系统输出的调姿角加速度和调姿稳定预留时间输出目标指令四元数,包括:
11、根据所述目标姿态指令四元数和所述当前姿态指令四元数计算出旋转矢量四元数;
12、根据所述旋转矢量四元数计算出空间旋转轴矢量和调姿目标角;
13、基于所述调姿目标角、所述调姿角加速度以及所述调姿稳定预留时间确定匀加速调姿时间;
14、根据所述调姿目标角、所述匀加速调姿时间、所述空间旋转轴矢量以及所述当前姿态指令四元数计算得到目标指令四元数。
15、结合第一方面,在一种实施方式中,所述基于所述调姿目标角、所述调姿角加速度以及所述调姿稳定预留时间确定匀加速调姿时间,包括:
16、将所述调姿目标角和所述调姿角加速度代入第一计算公式得到最小调姿时间,所述第一计算公式为:
17、
18、式中,ttzmin为最小调姿时间;jtz为调姿目标角;tza为调姿角加速度;
19、将所述最小调姿时间和所述调姿稳定预留时间代入第二计算公式得到总调姿时间,所述第二计算公式为:
20、ttz=ttzmin+toft
21、式中,ttz为总调姿时间,toft为调姿稳定预留时间;
22、将所述调姿目标角、所述调姿角加速度以及所述总调姿时间代入第三计算公式得到匀加速调姿时间,所述第三计算公式为:
23、
24、式中,ta为匀加速调姿时间。
25、结合第一方面,在一种实施方式中,所述根据所述调姿目标角、所述匀加速调姿时间、所述空间旋转轴矢量以及所述当前姿态指令四元数计算得到目标指令四元数,包括:
26、基于所述调姿目标角、所述匀加速调姿时间、所述空间旋转轴矢量以及预设的开始调姿时间确定出第一指令四元数;
27、基于所述第一指令四元数和所述当前姿态指令四元数计算得到目标指令四元数。
28、结合第一方面,在一种实施方式中,所述基于所述调姿目标角、所述匀加速调姿时间、所述空间旋转轴矢量以及预设的开始调姿时间确定出第一指令四元数,包括:
29、当预设的开始调姿时间小于或等于匀加速调姿时间,则基于所述调姿角加速度和所述预设的开始调姿时间计算出第一指令角,基于所述第一指令角和所述空间旋转轴矢量计算得到第一指令四元数;
30、当预设的开始调姿时间大于匀加速调姿时间且小于或等于总调姿时间与匀加速调姿时间的差值,则基于所述调姿角加速度、所述预设的开始调姿时间以及所述匀加速调姿时间计算出第二指令角,基于所述第二指令角和所述空间旋转轴矢量计算得到第一指令四元数;
31、当预设的开始调姿时间大于总调姿时间与匀加速调姿时间的差值且小于或等于总调姿时间,则基于所述调姿角加速度、所述预设的开始调姿时间、所述匀加速调姿时间以及所述调姿目标角计算出第三指令角,基于所述第三指令角和所述空间旋转轴矢量计算得到第一指令四元数;
32、当预设的开始调姿时间大于总调姿时间,则将所述调姿目标角作为第四指令角,基于所述第四指令角和所述空间旋转轴矢量计算得到第一指令四元数。
33、结合第一方面,在一种实施方式中,在所述基于所述调姿目标角、所述调姿角加速度以及所述调姿稳定预留时间确定匀加速调姿时间的步骤之前,还包括:
34、判断所述调姿目标角是否小于目标角阈值;
35、若是,则判定不需要对飞行器的当前姿态进行调姿;
36、若否,则执行所述调姿目标角、所述调姿角加速度以及所述调姿稳定预留时间确定匀加速调姿时间的步骤。
37、第二方面,本技术实施例提供了一种天线跟踪指令站系统,包括:
38、第一处理模块,其用于根据制导系统输出的目标俯仰角和偏航姿态角计算出飞行器体纵轴向量;
39、第二处理模块,其用于基于与预设的参考点对应的指令站站址和所述飞行器体纵轴向量确定目标姿态指令四元数;
40、第三处理模块,其用于基于所述目标姿态指令四元数、当前姿态指令四元数以及姿态稳定系统输出的调姿角加速度和调姿稳定预留时间输出目标指令四元数,所述目标指令四元数包括匀加速、匀速、匀减速的调姿指令;
41、输出模块,其用于通过所述目标指令四元数对飞行器的当前姿态进行调姿,以使飞行器达到目标姿态。
42、第三方面,本技术实施例提供了一种天线跟踪指令站设备,包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的天线跟踪指令站程序,其中所述天线跟踪指令站程序被所述处理器执行时,实现前述任一项所述的天线跟踪指令站方法的步骤。
43、第四方面,本技术实施例提供了一种计算机可读存储介质,计算机可读存储介质上存储有天线跟踪指令站程序,其中所述天线跟踪指令站程序被处理器执行时,实现前述任一项所述的天线跟踪指令站方法的步骤。
44、本技术实施例提供的技术方案带来的有益效果包括:
45、通过由制导系统输出的目标俯仰角和偏航姿态角实现制导能量约束;根据与预设的参考点对应的指令站站址和飞行器体纵轴向量确定出目标姿态指令四元数,以确定天线指向的方位,从而实现指令站位置约束;由姿态稳定系统输出调姿角加速度和调姿稳定预留时间,然后根据目标姿态指令四元数、当前姿态指令四元数以及姿态稳定系统输出的调姿角加速度和调姿稳定预留时间确定出目标指令四元数,以实现姿态稳定约束;最后根据目标指令四元数对飞行器的当前姿态进行调姿,以使飞行器达到目标姿态,从而确保飞行器在执行任务时具有良好的稳定性和精准性,进而保证了飞行器天线对指令站的可靠跟踪,解决了现有技术中存在的难以保证天线对指令站的可靠跟踪技术问题。
- 还没有人留言评论。精彩留言会获得点赞!