飞行器的控制方法及系统与流程
本公开涉及设备控制,具体地,涉及一种飞行器的控制方法及系统。
背景技术:
1、飞行器返航(return to home,rth)是航拍飞行器常见的一种功能。相关技术中,飞行器在启动后会飞行至预设的返航点,在车载飞行器的应用中,返航点(飞行位置)常常与车辆所在位置相关联。
2、相关技术中,若是在用户处于车辆外部控制飞行器飞行的情况下,无法对飞行器的返航点进行灵活设置,从而控制该飞行器返航,导致用户体验感较差。
技术实现思路
1、本公开提供一种飞行器的控制方法及系统,其目的是实现飞行器的远程控制。
2、为了实现上述目的,第一方面,本公开提供一种飞行器的控制方法,应用于车辆,所述方法包括:
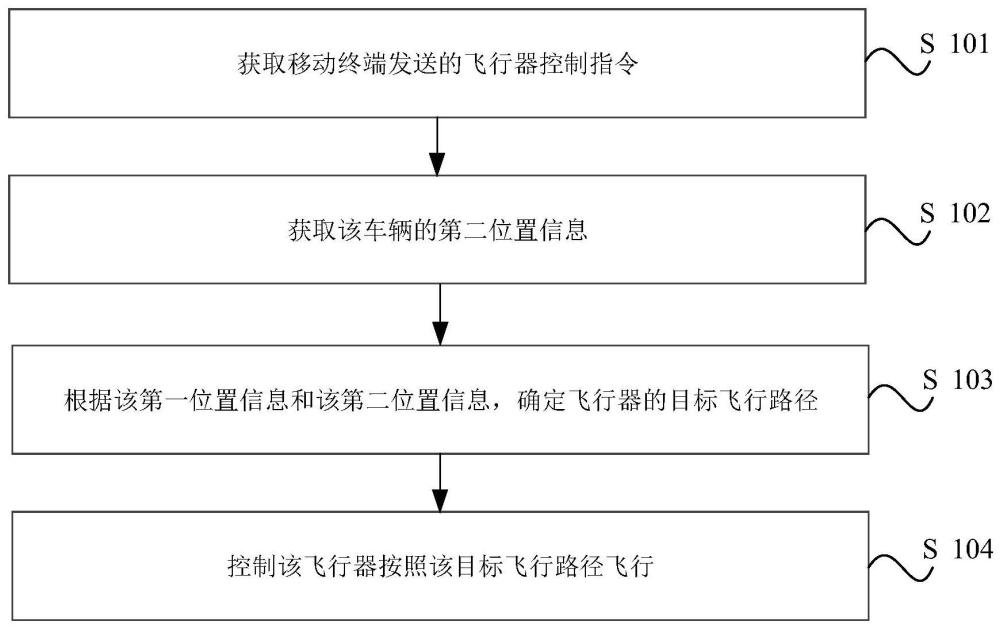
3、获取移动终端发送的飞行器控制指令;所述飞行器控制指令包括所述移动终端的第一位置信息;
4、获取所述车辆的第二位置信息;
5、根据所述第一位置信息和所述第二位置信息,确定飞行器的目标飞行路径;
6、控制所述飞行器按照所述目标飞行路径飞行。
7、可选地,所述获取移动终端发送的飞行器控制指令包括:
8、通过云服务器,获取所述移动终端发送的所述飞行器控制指令。
9、可选地,所述飞行器控制指令包括所述飞行器的飞行参数;所述根据所述第一位置信息和所述第二位置信息,确定飞行器的目标飞行路径包括:
10、从所述第一位置信息和所述第二位置信息中,确定所述飞行器的返航位置信息;
11、根据所述返航位置信息和所述飞行参数,确定所述目标飞行路径。
12、可选地,所述从所述第一位置信息和所述第二位置信息中,确定所述飞行器的返航位置信息包括:
13、将所述第一位置信息作为所述返航位置信息;或者,
14、将所述第二位置信息作为所述返航位置信息。
15、可选地,所述飞行参数包括所述飞行器的当前位置信息;所述根据所述返航位置信息和所述飞行参数,确定所述目标飞行路径包括:
16、根据所述返航位置信息和所述当前位置信息,确定至少两个候选飞行路径;
17、根据所述候选飞行路径,确定所述目标飞行路径。
18、可选地,所述飞行参数包括限制飞行区域和障碍物信息;所述根据所述候选飞行路径,确定所述目标飞行路径包括:
19、选择其中一个所述候选飞行路径作为所述目标飞行路径;
20、所述目标飞行路径绕过所述限制飞行区域和所述障碍物信息。
21、可选地,所述控制所述飞行器按照所述目标飞行路径飞行包括:
22、向所述飞行器发送控制指令,所述控制指令包括所述目标飞行路径,以使所述飞行器响应于所述控制指令,按照所述目标飞行路径飞行。
23、可选地,所述控制所述飞行器按照所述目标飞行路径飞行包括:
24、在确定所述飞行器均满足预设飞行条件的情况下,控制所述飞行器按照所述目标飞行路径飞行。
25、可选地,所述预设飞行条件包括以下条件中的一个或多个:
26、所述第一位置信息和所述第二位置信息均不属于限制飞行区域;
27、所述第一位置信息和所述第二位置信息之间通信信号的信号强度均大于或等于预设信号阈值;
28、所述第一位置信息和所述第二位置信息的气候参数均为指定气候参数;
29、所述飞行器的运行参数为指定运行参数。
30、可选地,所述方法还包括:
31、在确定所述飞行器不满足所述预设飞行条件的情况下,向所述移动终端发送第一提示信息;所述第一提示信息用于提示用户所述飞行器不能执行飞行任务。
32、可选地,所述方法还包括:
33、在确定所述飞行器满足预设返回条件的情况下,向所述移动终端发送第二提示信息;所述第二提示信息用于提示用户所述飞行器的飞行任务出现异常。
34、可选地,所述预设返回条件包括以下条件中的一个或多个:
35、所述飞行器的目标飞行路径中存在障碍物;
36、所述飞行器的电池电量小于或等于预设电量阈值;
37、所述车辆与所述移动终端之间存在通信故障。
38、可选地,所述方法还包括:
39、在确定所述飞行器满足所述预设返回条件的情况下,控制所述飞行器根据所述第二提示信息返回所述车辆。
40、可选地,所述方法还包括:
41、在确定所述飞行器满足所述预设返回条件的情况下,控制所述飞行器悬停在指定位置;
42、在预设时间段内接收到所述移动终端发送的返回指令的情况下,控制所述飞行器根据所述第二提示信息从所述指定位置返回所述车辆。
43、可选地,所述方法还包括:
44、获取所述移动终端发送的飞行器调整指令;
45、基于所述飞行器调整指令,控制所述飞行器调整飞行姿态。
46、第二方面,本公开提供一种飞行器的控制方法,应用于移动终端,所述方法包括:
47、响应于用户操作,生成飞行器控制指令;所述飞行器控制指令包括移动终端的第一位置信息;
48、将所述飞行器控制指令发送至车辆,以便所述车辆根据所述车辆的第二位置信息和所述第一位置信息确定目标飞行路径,并控制所述飞行器按照所述目标飞行路径飞行。
49、可选地,所述第一位置信息通过以下方式得到:
50、将所述移动终端的定位信息,作为所述第一位置信息;或者,
51、将所述用户操作关联的位置信息作为所述第一位置信息。
52、可选地,所述方法还包括:
53、获取所述车辆发送的第二提示信息;
54、根据所述第二提示信息,生成返回指令;
55、将所述返回指令发送至所述车辆,以便所述车辆根据所述返回指令控制所述飞行器返回所述车辆。
56、可选地,所述方法还包括:
57、获取所述车辆发送的拍摄图像;
58、根据所述拍摄图像,生成飞行器调整指令;
59、将所述飞行器调整指令发送至所述车辆,以便所述车辆基于所述飞行器调整指令,控制所述飞行器调整飞行姿态。
60、第三方面,本公开提供一种飞行器的控制系统,所述系统包括移动终端、车辆和飞行器;所述移动终端与所述车辆连接;所述车辆与所述飞行器连接;
61、所述车辆,用于执行上述第一方面所述的飞行器控制方法;
62、所述终端,用于执行上述第二方面所述的飞行器控制方法;
63、所述飞行器,用于接收所述车辆发送的目标飞行路径,并按照所述目标飞行路径飞行。
64、可选地,所述系统还包括云服务器;所述云服务器分别与所述移动终端和所述车辆连接;
65、所述云服务器,用于将所述移动终端的所述飞行器控制指令传输至所述车辆。
66、通过上述技术方案,可以通过移动终端对车辆的飞行器进行远程控制,实现飞行器飞行位置与移动终端的位置信息的关联,进而实现了对飞行器飞行位置的灵活设置,避免了用户在离开车辆后无法控制飞行器的问题,提高了用户体验。
67、本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!