一种带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法
本发明涉及人工智能,具体而言,尤其涉及一种带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法。
背景技术:
1、近年来,水面无人船舶(unmanned surface vehicle,usv)已成为国际海事领域的研究热点。无人船在水上搜救、近岸监控等领域应用广泛,面对复杂的海洋环境,无人船能够在兼顾安全性和经济性的前提下有效开展海上作业,颇具研究价值。而无人船的轨迹跟踪控制作为船舶控制领域的关键技术之一,一直是业界学者研究探讨的重要方向。
2、在航海实践中,控制信号需要通过通信信道传输,而信息在信道传输的过程中,必须进行量化与编码。量化是将连续信号转化为一组离散符号或整数值的过程,考虑到海上通讯带宽受限,为保证系统在给定的带宽内正常运行,考虑带有状态及输入量化的船舶轨迹跟踪控制更具有航海实践意义。
3、值得注意的是,状态和输入量化的结合符合航海实践中控制器的操作原则,但它不能从根本上解决能量消耗的问题。因此,事件触发机制在近年来引起了人们的广泛关注。基于事件触发策略设计控制器可以有效降低通信速率,减轻信号传输负担,节省通信资源,提高控制系统的工作效率。
技术实现思路
1、根据上述提出的海上通讯带宽受限情况下欠驱动无人船的轨迹跟踪控制问题,提供一种带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法。本发明针对无人船海上通讯带宽受限而存在的量化问题,设计了带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制器,在实现船舶轨迹有效跟踪的同时,减轻了海上通讯信号传输负担,节省了通信资源。
2、本发明采用的技术手段如下:
3、一种带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法,包括:
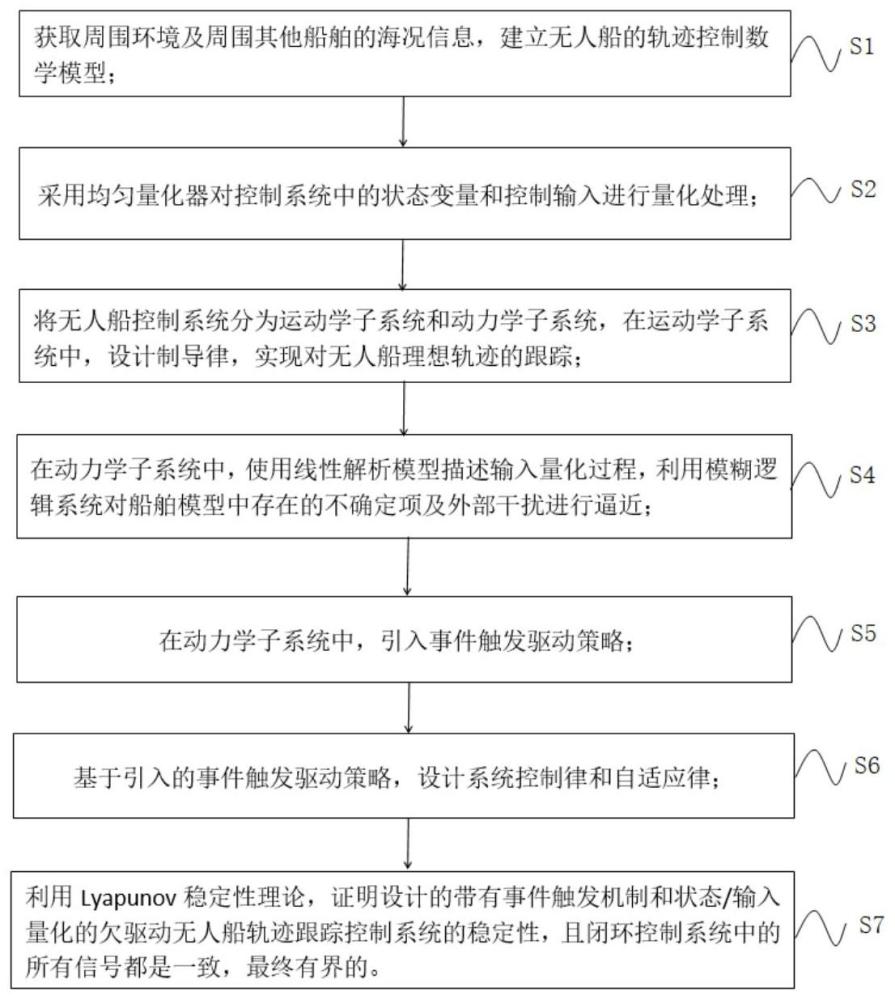
4、s1、获取周围环境及周围其他船舶的海况信息,建立无人船的轨迹控制数学模型;
5、s2、采用均匀量化器对控制系统中的状态变量和控制输入进行量化处理;
6、s3、将无人船控制系统分为运动学子系统和动力学子系统,在运动学子系统中,设计制导律,实现对无人船理想轨迹的跟踪;
7、s4、在动力学子系统中,使用线性解析模型描述输入量化过程,利用模糊逻辑系统对船舶模型中存在的不确定项及外部干扰进行逼近;
8、s5、在动力学子系统中,引入事件触发驱动策略;
9、s6、基于引入的事件触发驱动策略,设计系统控制律和自适应律;
10、s7、利用lyapunov稳定性理论,证明设计的带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制系统的稳定性,且闭环控制系统中的所有信号都是一致,最终有界的。
11、进一步地,所述步骤s1具体包括:
12、所述步骤s1,具体包括:
13、s11、考虑轨迹跟踪控制问题,建立欠驱动无人船的运动学数学模型,如下:
14、
15、其中,x,y,分别为无人船的横向位置、纵向位置和航向角,u,v,r分别为无人船的前进速度、横向速度和偏航速度;
16、s12、建立欠驱动无人船的非线性动力学数学模型,如下:
17、
18、其中,和是无人船的质量;
19、和是水动力导数项;iz是绕z轴转动的转动惯量;fu(·),fv(·)和fr(·)为非线性函数,分别表示向心力、科氏力和水动力阻尼效应;τuω,τvω和τrω表示海风和海浪引起的时变扰动用;q(τu)、q(τr)分别表示量化后的控制输入τu和τr。
20、进一步地,所述步骤s2,具体包括:
21、s21、将量化过程表述为:
22、
23、其中,χ表示均匀量化器的量化步长且χ>0,设l1=χ,li+1=li+χ,则存在常数χ1、χ2使得|l1-q(l1)|≤χ1/2、|l2-q(l2)|≤χ2/2,其中,l2=τu,τr且χ1,χ2均为大于0的常数;
24、s22、定义理想轨迹,如下:
25、
26、其中,xd、yd为无人船在惯性坐标系下的理想参考轨迹,轨迹参数hd(t)表示连续可微矢量,导数为
27、s23、因此,控制目标是所设计的稳定的闭环系统,并解决无人船在给定理想轨迹下的跟踪控制问题,即:
28、
29、其中,h=[x,y]t为无人船在惯性坐标系中的实际位置,δ0为一个较小的常数且满足δ0>0。
30、进一步地,所述步骤s3,具体包括:
31、s31、定义无人船的轨迹跟踪误差,如下:
32、
33、其中,表示旋转矩阵,
34、s32、对定义的无人船的轨迹跟踪误差进行求导,得:
35、
36、其中,且
37、s33、为了解决无人船的欠驱动问题,引入坐标变换,如下:
38、
39、其中,ζ0∈r为大于0的常数,结合步骤s32得到:
40、
41、其中,k=diag{a,ζ0},
42、s34、设计无人船分布式运动学系统制导律,如下:
43、
44、其中,且结合步骤s33,将无人船运动学误差表示为:
45、
46、s35、在设计的无人船分布式运动学系统制导律中,当需要求导由外环产生的中间命令信号时,使用线性二阶微分器,如下:
47、
48、其中,ψ(t)为待微分的输入信号,r为大于0的常数,为跟踪信号,为跟踪信号一阶导数的估计值,二阶微分器的初值为
49、进一步地,所述步骤s4,具体包括:
50、s41、根据步骤s12,得到:
51、
52、s42、将动力学子系统的控制目标表示为:
53、
54、其中,σ1,σ2都是较小的正整数;
55、s43、根据步骤s41,得到:
56、
57、其中,
58、s44、令q(τu)=q1u(t)τu+q2u(t),q(τr)=q1r(t)τr+q2r(t),则有:
59、
60、其中,q1u(t)、q1r(t)均是未知的;由于量化过程中符号不变,因此由上式可知q1u(t)>0、q1r(t)>0;当|τu(t)|<ι、|τr(t)|<ι时,q(τu(t))、q(τr(t))有界,因此q2u(t)、q2r(t)有界,即令
61、s45、定义积分滑膜面,如下:
62、
63、其中,cu>0,cr>0;对定义的积分滑膜面进行求导,得到:
64、
65、且:
66、
67、s46、令δu(x)=fu+du,δr(x)=fr+dr,得到:
68、
69、由于δu(x)是未知的,根据通用近似定理,对于任意较小的常数ε,存在一个模糊逻辑系统定义为:
70、
71、其中,为模糊系统的理想权值,ξu(x)为模糊基向量,εu为模糊系统的近似误差且|εu|≤ε;
72、s47、由于为δu(x)的估计值,因此得出:
73、
74、其中,是的估计值,于是有:
75、
76、s48、定义
77、其中,αu,为大于0的常数且满足则有:
78、
79、于是得到:
80、
81、其中,
82、s49、令且则有:
83、
84、于是得到:
85、
86、其中,为δr(x)的估计值,为模糊系统的理想权值,为的估计值且εr为模糊系统的近似误差且|εr|≤ε,αr,为大于0的常数且满足
87、s50、由于q1u(t)和q1r(t)的值都是未知且时变的,因此采用自适应法估计它们的界,为防止在估计值为零时出现奇异问题,使用q1u(t)和q1r(t)的下界进行估计,定义时变增益:
88、νu=1/q1u(t)min,νr=1/q1r(t)min,
89、其中,q1u(t)min为q1u(t)的下界,q1r(t)min为q1r(t)的下界。
90、进一步地,所述步骤s5,具体包括:
91、s51、在执行器量化的基础上,考虑节省输入信号通信量,定义:
92、
93、
94、其中,为不考虑状态和输入量化的系统控制输入,n为满足的时间常数,满足
95、s52、存在一个连续时变系数κ(t),满足κ(tk)=0,κ(tk+1)=±1且|κ(t)|≤1,使于是有:
96、
97、当κ(t)=0且时,t=tk,当|κ(t)|<1且时,t∈[tk,tk+1);当|κ(t)|=1且时,t=tk+1,
98、进一步地,所述步骤s6,具体包括:
99、s61、根据步骤s51和s52,设计带有事件触发机制和输入量化的欠驱动无人船跟踪控制律和自适应律,如下:
100、
101、
102、
103、其中,μ1,μ2,μ3,μ4,ou,or,θu,θr,ξu,ξr为大于0的常数,且
104、s62、因此,基于su,sr,的动力学误差子系统表示为:
105、
106、其中,λ是使用线性二阶微分器产生的滤波误差;
107、s63、为了设计出带有状态量化的控制输入τu和τr,对系统中的状态变量和中间信号进行量化处理,于是得到:
108、
109、
110、
111、
112、
113、
114、
115、其中,分别为eu,er,su,sr,ηu,ηr,ez,的量化值;
116、s64、根据步骤s63,得到同时带有状态量化和输入量化的制导律、自适应律和控制律为:
117、
118、
119、
120、
121、其中,λu,λr分别为ud,ur,ρ,的量化值。
122、进一步地,所述步骤s7,具体包括:
123、s71、定义lyapunov函数为:
124、
125、其中,且νu>0,νr>0,对定义的lyapunov函数求导,得到:
126、
127、s72、结合步骤s48,步骤s49,得到:
128、
129、s73、根据步骤s61设计的控制律和自适应律,得到:
130、
131、s74、由于q1(t)>0,得到:
132、
133、由于|a|-a2/(o+|a|)=o|a|/(o+|a|)<o,于是-a2/(o+|a|)<o-|a|≤o±a,令得到:
134、
135、考虑q1≥q1min=1/ν>0,则有:
136、
137、s75、由于且得到:
138、
139、其中,且ω=ωu+ωr+1/2||λ||2,因此,根据lyapunov稳定性理论,当不考虑状态量化时,欠驱动无人船轨迹跟踪控制系统误差是有界的且系统误差能够收敛到一个较小残差集内。
140、s76、根据步骤s12,得到其中是u,r的量化值,于是则有:
141、
142、s77、根据步骤s75可知,su和sr是有界的,结合步骤s71得到:
143、
144、s78、由于sgn是符号函数,所以有界于同时,存在常数使得且于是得到:
145、
146、且:
147、
148、s79、根据步骤s71到步骤s75可知,不考虑状态量化的系统是稳定的且系统误差有界,于是,|ηu|和|ηr|均是有界的,因此:
149、
150、其中,和均为常数;
151、s80、根据步骤s78得到:
152、
153、于是得到:
154、
155、其中,和均为常数;
156、s81、根据步骤s61得到:
157、
158、其中,和均为常数,结合步骤s61和步骤s64,得到:
159、
160、且
161、
162、s82、结合步骤s79、s80、s81得到:
163、
164、s83、根据步骤s12得到其中,是x,y的量化值,因此,是有界的,根据步骤s31得出和是有界的,于是得到:
165、
166、因此,量化反馈控制系统中存在的量化误差是有界的。
167、s84、根据步骤s52,将和的时间导数表述为:
168、
169、于是得到:
170、
171、且:
172、
173、s85、根据前述步骤得出,信号αu,su,αr,sr,cu,eu,cr,er均是有界的,因此,一定存在满足的常数,使得由于:
174、
175、则在执行区间t*上存在一个下界,满足即不存在芝诺行为;
176、s86、在考虑了状态量化之后,结合步骤s312,步骤s328可得
177、
178、s87、根据步骤s72得出,设计的量化反馈控制系统的量化误差是有界的,结合步骤s52得出,存在常数使得且因此,得到:
179、
180、其中:
181、
182、
183、
184、
185、且根据lyapunov稳定性理论,得出带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制系统是稳定的。
186、较现有技术相比,本发明具有以下优点:
187、1、本发明提供的带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法,将控制系统中的状态变量和输入变量进行量化处理,并基于事件触发策略设计控制器,解决了海上通讯带宽受限情况下无人船的轨迹跟踪控制问题,在保证有效跟踪的同时,减轻了海上通讯信号传输负担,节省了通信资源。
188、2、本发明提供的带有事件触发机制和状态/输入量化的欠驱动无人船轨迹跟踪控制方法,采用线性分析模型来描述输入量化过程,即所设计的自适应量化跟踪控制器不需要量化参数的先验信息。
189、3、本发明基于matlab平台进行了无人船控制系统量化前后的对比实验,同时,基于事件触发机制,设计了自适应量化跟踪控制器以实现对无人船轨迹的跟踪。在考虑了事件触发机制和状态/输入量化后,系统控制输入曲线更契合航海工程实践,减少了执行器的执行频次,降低了控制幅度。进一步验证了本发明方法的有效性和合理性。
190、基于上述理由本发明可在人工智能等领域广泛推广。
- 还没有人留言评论。精彩留言会获得点赞!