一种RGV的不对称S型速度曲线调速方法及系统
本发明涉及运动速度控制领域,尤其是指一种rgv的不对称s型速度曲线调速方法及系统。
背景技术:
1、随着自动化领域的不断发展,轨道式导引车(rail guide vehicle,以下简称rgv)具有运行速度快且稳定、可靠性高、成本低等特点,在现代自动化物流系统领域中得到了越来越广泛的应用。rgv系统既可作为立体仓库的周边设备,也可作为独立系统。rgv可以十分方便地与其他物流系统实现自动连接,如仓库、各种缓冲站、输送机、升降机和机器人等,按照计划进行物料的输送,同时有动态移栽特点,使物料在不同工位之间的传送及输送线布局更加紧凑、简洁,从而提高物料的输送效率。rgv以载重量大、安全可靠、环境适应能力强的优势多用于固定路线、重载转运和环境复杂的工业生产线中,是不可替代的关键设备之一。
2、目前行业内rgv速度控制主要有以下三种方式,其特点如下:
3、(1)多段调速控制方式,即根据rgv的实际控制要求及操作人员的控制经验,利用变化分档控制方式控制rgv运行。这种控制方式实现比较简单,但应用时为满足rgv的控制要求,对控制器和变频器的配合要求较高。
4、(2)由变频器完成对rgv闭环速度控制,位移采用开环控制。rgv的实际运行曲线根据现场实际运行获得,不同的货位对应各自速度运行曲线。执行作业任务前,主控机会将当前任务的目的地址与当前地址进行比较,plc再对存储在变频器内运行曲线进行选择切换,最终达到调速和停准的目的。但由于rgv作业任务的目的地址的不确定性和离散性,不同货位对应不同最佳速度曲线。设计人员不可能将任意情况速度曲线均设计存储,而且通常变频器内存有限。所以此种控制方式下,速度曲线效果较差。
5、(3)模糊技术控制方式,力求改善在原速度曲线拐点处的切换问题。在实际应用中,plc先对采集到的速度输入信号进行处理,选择控制模式并在相应模式的响应表里得到精确的频率控制量,最后通过变频器实现速度控制。其中以模糊pid为代表。此种方式有很多不足:①对于具有非线性、慢时变、纯滞后特点的控制过程,很难得到确切的传递函数或状态方程。②在噪声、负载扰动的影响下,过程参数往往会发生变化。采用常规pid控制器,以一组固定不变的参数去适应参数变化,显然难以获得满意的控制效果,尤其是当参数变化超过一定的范围时,系统性能就会明显变差。
6、(4)对称的s型速度曲线,可以使物体在加速和减速过程中的速度变化平滑,减少了物体的震动和冲击,从而保护了物体的结构和性能;使物体在运动过程中保持稳定,减少了物体的晃动和偏移,从而提高了物体的精度和稳定性。由于rgv轨道的复杂性,尤其是考虑弯道速度要略低于直道速度,对于路径上有弯道的rgv小车而言,对称的s型速度曲线会受到弯道限速的影响,降低整车的运行效率。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中rgv系统调速方法不能适应复杂工作环境、稳定性差以及效率低下的问题。
2、为解决上述技术问题并结合工业生产中的运输要求,,本发明提供了一种rgv的不对称s型速度曲线调速方法,能够适应复杂工作环境、能够通过复杂路径运行稳定且高效,该方法包括以下步骤:
3、s1:接收不对称s型速度曲线的输入参数,所述输入参数包括:起始时刻位置q0、终止时刻位置q1、起始时刻速度v0、终止时刻速度v1、最大速度vmax、最大加速度amax、最小加速度amin、最大加加速度jmax和最小加加速度jmin;
4、s2:根据所述输入参数,得到不对称s型速度曲线的加速时间ta、减速时间td、加速段时间tj1、减速段时间tj2、加速段实际最大加速度alima和减速段实际最大加速度alimd;
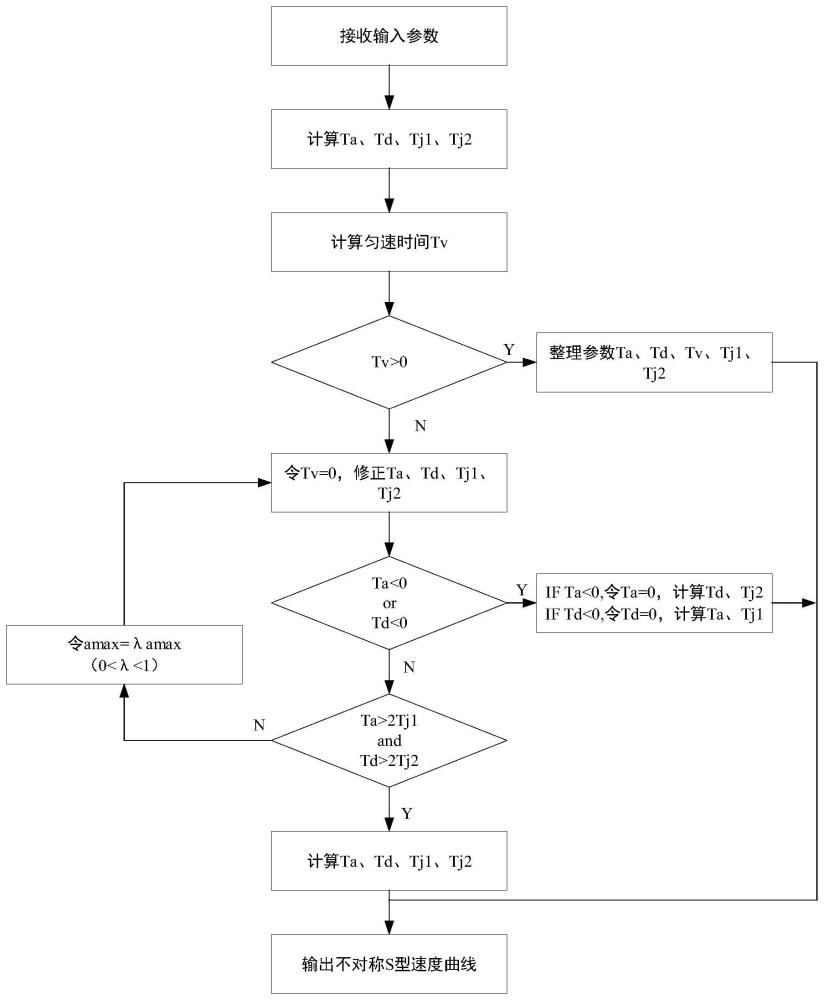
5、s3:根据所述输入参数、所述加速时间ta和所述减速时间td,得到匀速时间tv;
6、s4:判断所述匀速时间tv是否大于零:若所述匀速时间tv大于零,根据所述加速时间ta、所述减速时间td、所述加速段时间tj1和所述减速段时间tj2输出不对称s型速度曲线;否则,对所述加速时间ta、所述减速时间td、所述加速段时间tj1和所述减速段时间tj2进行修正,得到修正后的加速时间ta、减速时间td、加速段时间tj1和减速段时间tj2,根据修正后的加速时间ta、减速时间td、加速段时间tj1和减速段时间tj2,输出不对称s型速度曲线;
7、s5:利用所述不对称s型速度曲线控制rgv入弯和出弯时的速度变化;
8、其中,所述加速时间ta为速度从零到最大速度的变化时间,所述减速时间td为速度从最大速度到零的变化时间,所述加速段时间tj1为加速度从零到最大加速度的变化时间或加速度从最大加速度到零的变化时间,所述减速段时间tj2为加速度从零到最小加速度的变化时间或加速度从最小加速度到零的变化时间。
9、在本发明的一个实施例中,s2中,得到不对称s型速度曲线的加速时间ta、加速段时间tj1和加速段实际最大加速度alima的计算方法分为以下两种情况:
10、当加速段能达到最大加速度amax时,则有:
11、
12、
13、alima=amax;
14、当加速段不能达到最大加速度amax时,则有:
15、
16、ta=2tj1
17、alima=jmaxtj1。
18、在本发明的一个实施例中,s2中,得到不对称s型速度曲线的减速时间td、减速段时间tj2和减速段实际最大加速度alimd的计算方法分为以下两种情况:
19、当减速段能达到最大加速度amin时,则有:
20、
21、
22、alimd=amin;
23、当减速段不能达到最大加速度amin时,则有:
24、
25、td=2tj2
26、alimd=jmintj2。
27、在本发明的一个实施例中,s3中,所述匀速时间tv的计算方法为:
28、
29、在本发明的一个实施例中,s4中,得到修正后的加速时间ta、减速时间td、加速段时间tj1和减速段时间tj2的步骤包括:
30、令tv=0,判断是否满足ta<0或者td<0的条件:
31、若满足所述条件下:ta<0时,令ta=0,计算得到td和tj2:
32、
33、td<0时,令td=0,计算得到ta和tj1:
34、
35、若不满足所述条件:判断是否满足ta>2tj1且td>2tj2的条件:
36、若满足ta>2tj1且td>2tj2的条件,计算得到ta、td、tj1和tj2:
37、
38、若不满足ta>2tj1且td>2tj2的条件,令amax=λamax,循环修正参数ta、td、tj1和tj2的过程,直到满足ta≥2tj1且td≥2tj2的条件;
39、其中,alima为加速段实际最大加速度,alimd为减速段实际最大加速度,vlim为实际达到的最大速度,
40、在本发明的一个实施例中,在s5中,所述不对称s型速度曲线包括位移曲线、速度曲线、加速度曲线和加加速度曲线,其中,所述位移曲线q的表达式为:
41、
42、其中,alima为加速段实际最大加速度,alimd为减速段实际最大加速度,vlim为实际达到的最大速度。
43、在本发明的一个实施例中,所述速度曲线v的表达式为:
44、
45、其中,alima为加速段实际最大加速度,alimd为减速段实际最大加速度,vlim为实际达到的最大速度。
46、在本发明的一个实施例中,所述加速度曲线a的表达式为:
47、
48、在本发明的一个实施例中,所述加加速度曲线j的表达式为:
49、
50、基于同一发明构思,本发明还提供一种rgv的不对称s型速度曲线调速系统,该系统包括以下模块:
51、输入参数接收模块,用于接收不对称s型速度曲线的输入参数,所述输入参数包括:起始时刻位置q0、终止时刻位置q1、起始时刻速度v0、终止时刻速度v1、最大速度vmax、最大加速度amax、最小加速度amin、最大加加速度jmax和最小加加速度jmin;
52、第一计算模块,用于根据所述输入参数,得到不对称s型速度曲线的加速时间ta、减速时间td、加速段时间tj1、减速段时间tj2、加速段实际最大加速度alima和减速段实际最大加速度alimd;
53、第二计算模块,用于根据所述输入参数、所述加速时间ta和所述减速时间td,得到匀速时间tv;
54、不对称s型速度曲线输出模块,用于判断所述匀速时间tv是否大于零:若所述匀速时间tv大于零,根据所述加速时间ta、所述减速时间td、所述加速段时间tj1和所述减速段时间tj2,输出不对称s型速度曲线;否则,对所述加速时间ta、所述减速时间td、所述加速段时间tj1和所述减速段时间tj2进行修正,得到修正后的加速时间ta、减速时间td、加速段时间tj1和减速段时间tj2,根据修正后的加速时间ta、减速时间td、加速段时间tj1和减速段时间tj2,输出不对称s型速度曲线;
55、速度变化控制模块,用于利用所述不对称s型速度曲线控制rgv入弯和出弯时的速度变化;
56、其中,所述加速时间ta为速度从零到最大速度的变化时间,所述减速时间td为速度从最大速度到零的变化时间,所述加速段时间tj1为加速度从零到最大加速度的变化时间或加速度从最大加速度到零的变化时间,所述减速段时间tj2为加速度从零到最小加速度的变化时间或加速度从最小加速度到零的变化时间。
57、本发明的上述技术方案相比现有技术具有以下优点:
58、相比于传统的对称s型速度曲线,本发明的不对称s型速度曲线将加速段和减速段的参数分别进行计算,可以实现自动生成起始速度和终止速度不相同的速度曲线,可以根据实际需求进行调整,可以更加灵活地控制rgv的运动和生产过程,保证rgv在运行过程中不受弯道速度的限制,可以在更多的时间内以最大速度运行,大大缩短任务时间,提高任务效率,并且能适应各种复杂的rgv轨道。
- 还没有人留言评论。精彩留言会获得点赞!