一种全地形越野车跟随方法、系统及电子设备与流程
本发明涉及车辆跟随领域,特别是涉及一种全地形越野车跟随方法、系统及电子设备。
背景技术:
1、目前,自动化地形跟随系统在野外探险、搜救任务等领域具有重要意义。然而,现有技术中的地形跟随系统存在一些问题,如精度不高、适应性不足、安全性不强等。为了解决这些问题,提高越野车地形跟随系统的效率和安全性,亟需提供一种新的跟随方法或系统。
技术实现思路
1、本发明的目的是提供一种全地形越野车跟随方法、系统及电子设备,能够实现全地形越野车对移动标签的精准跟随和安全行驶。
2、为实现上述目的,本发明提供了如下方案:
3、一种全地形越野车跟随方法,包括:
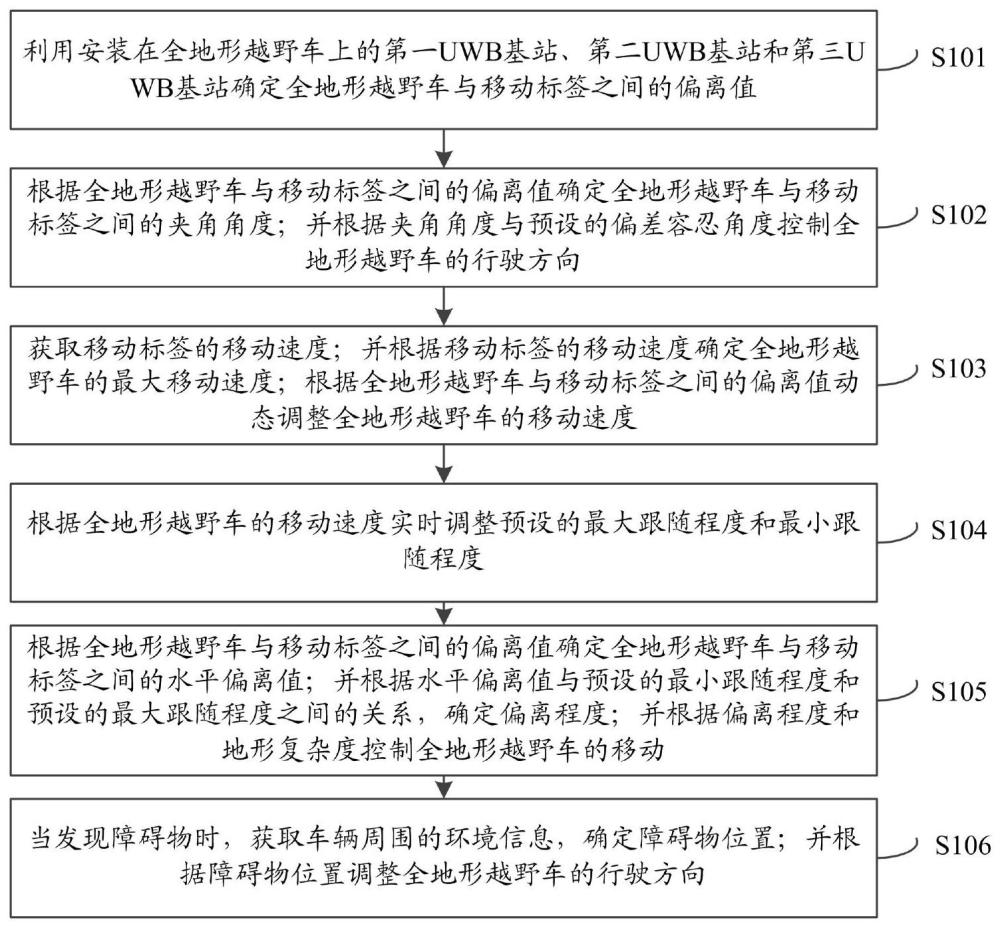
4、利用安装在全地形越野车上的第一uwb基站、第二uwb基站和第三uwb基站确定全地形越野车与移动标签之间的偏离值;所述第一uwb基站和所述第二uwb基站分别设置在全地形越野车的两侧,所述第三uwb基站设置在全地形越野车的车头中间位置;所述第一uwb基站、第二uwb基站和第三uwb基站形成等边三角形;
5、根据全地形越野车与移动标签之间的偏离值确定全地形越野车与移动标签之间的夹角角度;并根据夹角角度与预设的偏差容忍角度控制全地形越野车的行驶方向;
6、获取移动标签的移动速度;并根据移动标签的移动速度确定全地形越野车的最大移动速度;根据全地形越野车与移动标签之间的偏离值动态调整全地形越野车的移动速度;
7、根据全地形越野车的移动速度实时调整预设的最大跟随程度和最小跟随程度;
8、根据全地形越野车与移动标签之间的偏离值确定全地形越野车与移动标签之间的水平偏离值;并根据水平偏离值与预设的最小跟随程度和预设的最大跟随程度之间的关系,确定偏离程度;并根据偏离程度和地形复杂度控制全地形越野车的移动;
9、当发现障碍物时,获取车辆周围的环境信息,确定障碍物位置;并根据障碍物位置调整全地形越野车的行驶方向。
10、可选地,所述地形复杂度包括以下公式:
11、complexity_score=k1*slope+k2*roughness+k3*obstaclecount;
12、其中,complexity_score为地形复杂度,slope为坡度,slope=atan2(δh,δd),δh表示车辆当前高度和地面高度的差异,δd表示水平距离,roughness为颠簸度,roughness=sqrt(σ(δh_i)2/n),δh_i表示相邻点之间的高度差,n表示采样点数量,obstaclecount为障碍物数量,通过图像处理算法检测和计算得到,k1、k2和k3是权重系数。
13、可选地,所述并根据偏离程度和地形复杂度控制全地形越野车的移动,具体包括:
14、若水平偏离值d<预设的最小跟随程度d_min且地形复杂度complexity_score小于设定阈值,则控制全地形越野车向移动标签靠近、移动速度为高档;
15、如果水平偏离值d<预设的最小跟随程度d_min且地形复杂度complexity_score大于设置阈值,则控制让越野车向移动标签靠近、移动速度为低档;
16、若水平偏离值d>预设的最大跟随程度d_max,则控制让越野车减速或停止,拉大与移动标签的距离;
17、若预设的最小跟随程度d_min≤水平偏离值d≤预设的最大跟随程度d_max,则维持越野车与移动标签的偏离值不变。
18、可选地,所述根据全地形越野车与移动标签之间的偏离值确定全地形越野车与移动标签之间的夹角角度;并根据夹角角度与预设的偏差容忍角度控制全地形越野车的行驶方向,具体包括:
19、利用公式θ=atan2(yt-yc,xt-xc)确定全地形越野车与移动标签之间的夹角角度;其中,θ为全地形越野车与移动标签之间的夹角角度,xc,yc为全地形越野车的位置坐标,xt,yt为移动目标的位置坐标;
20、当|θ|>θ_thresh时,调整全地形越野车的行驶方向。
21、可选地,当全地形越野车本体与移动标签的水平偏离值大于最大跟随程度的时间超过时间阈值时,触发警报。
22、一种全地形越野车跟随系统,包括:
23、偏离程度检测模块,用于利用安装在全地形越野车上的第一uwb基站、第二uwb基站和第三uwb基站确定全地形越野车与移动标签之间的偏离值;所述第一uwb基站和所述第二uwb基站分别设置在全地形越野车的两侧,所述第三uwb基站设置在全地形越野车的车头中间位置;所述第一uwb基站、第二uwb基站和第三uwb基站形成等边三角形;
24、角度计算和判断模块,用于根据全地形越野车与移动标签之间的偏离值确定全地形越野车与移动标签之间的夹角角度;并根据夹角角度与预设的偏差容忍角度控制全地形越野车的行驶方向;
25、速度控制模块,用于获取移动标签的移动速度;并根据移动标签的移动速度确定全地形越野车的最大移动速度;根据全地形越野车与移动标签之间的偏离值动态调整全地形越野车的移动速度;
26、偏离程度设置模块,用于根据全地形越野车的移动速度实时调整预设的最大跟随程度和最小跟随程度;
27、跟随策略模块,用于根据全地形越野车与移动标签之间的偏离值确定全地形越野车与移动标签之间的水平偏离值;并根据水平偏离值与预设的最小跟随程度和预设的最大跟随程度之间的关系,确定偏离程度;并根据偏离程度和地形复杂度控制全地形越野车的移动;
28、避障模块,用于当发现障碍物时,获取车辆周围的环境信息,确定障碍物位置;并根据障碍物位置调整全地形越野车的行驶方向。
29、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种全地形越野车跟随方法。
30、可选地,所述存储器为计算机可读存储介质。
31、根据本发明提供的具体实施例,本发明公开了以下技术效果:
32、本发明所提供的一种全地形越野车跟随方法、系统及电子设备,通过安装在全地形越野车上的第一uwb基站、第二uwb基站和第三uwb基站确定全地形越野车与移动标签之间的偏离值,之后根据偏离值确定全地形越野车与移动标签之间的夹角角度;以及根据移动标签的移动速度和全地形越野车与移动标签之间的偏离值动态调整全地形越野车的移动速度,进而根据全地形越野车的移动速度实时调整的预设的最大跟随程度和最小跟随程度,确定偏离程度;并根据偏离程度和地形复杂度控制全地形越野车的移动;但存在障碍物时,进行行驶方向的调整;通过使用uwb基站进行距离检测和计算,以及角度计算和判断模块的协同作用,能够精准地跟随移动标签的位置和行动;通过速度控制和偏离程度的设置,能够根据移动标签的速度和偏离程度调整越野车的移动方式,达到自适应的跟随效果;根据障碍物位置和相对距离,及时调整越野车的行驶方向,避免碰撞和阻碍;本发明全地形越野车可以高效跟随移动标签,实现自动化的跟踪和控制,提高工作效率,并减少人工操作的风险。
- 还没有人留言评论。精彩留言会获得点赞!