一种基于巡检机器人的水电厂智能巡检方法及系统与流程
本发明属于智能巡检,具体是涉及到一种基于巡检机器人的水电厂智能巡检方法及系统。
背景技术:
1、水电厂智能巡检系统智能巡视模块是基于人工智能图像识别与分析技术、物联网、智能机器人、智能摄像头等技术的智能巡视功能,通过对系统配套或现有的智能巡检机器人、智能监控摄像头等设备的接入管理和巡检任务管理,实现对水电厂设备及其环境远程自主化无人巡检。同时基于智能机器人和高清视频联合巡检技术,实现多种巡视终端、多元巡视数据统一管理,实现全方位多渠道的智能感知,延伸运维人员的手、眼、脑,实现大幅度提升设备状态感知,设备缺陷发现,设备管控、实时主动预警和应急处置等方面的能力。
2、现有的智能巡检系统通常通过采集设备的运行声音或运行图像以对设备状态进行分析,然而在声音或图像的采集过程中,很容易受到环境因素的干扰,在对采集到的数据进行分析时难以完全排除干扰因素,导致最终分析结果的准确度较低。
技术实现思路
1、本发明提供一种基于巡检机器人的水电厂智能巡检方法及系统,以解决智能巡检过程中容易受到环境因素干扰导致设备分析结果准确度较低的问题。
2、第一方面,本发明提供一种基于巡检机器人的水电厂智能巡检方法,该方法包括如下步骤:
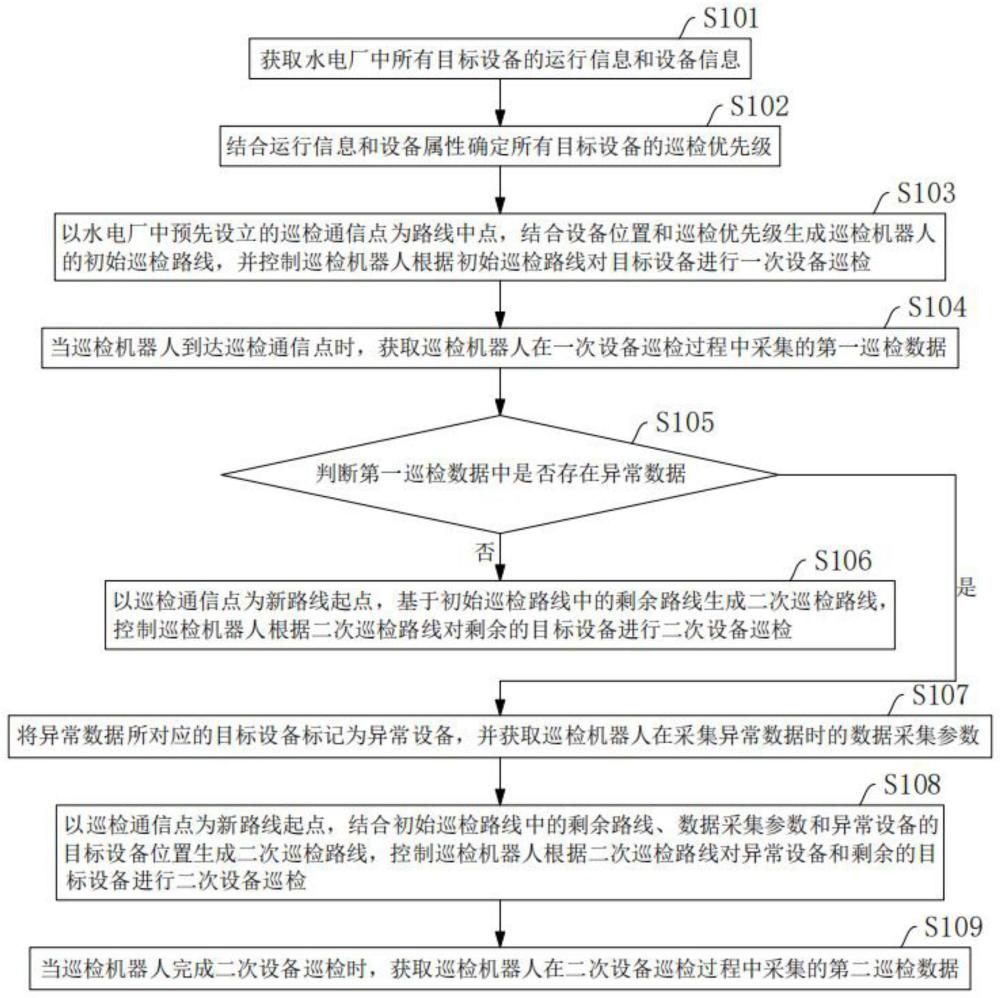
3、获取水电厂中所有目标设备的运行信息和设备信息,所述设备信息包括设备位置和设备属性;
4、结合所述运行信息和所述设备属性确定所有所述目标设备的巡检优先级;
5、以所述水电厂中预先设立的巡检通信点为路线中点,结合所述设备位置和所述巡检优先级生成巡检机器人的初始巡检路线,并控制所述巡检机器人根据所述初始巡检路线对所述目标设备进行一次设备巡检;
6、当所述巡检机器人到达所述巡检通信点时,获取所述巡检机器人在所述一次设备巡检过程中采集的第一巡检数据;
7、判断所述第一巡检数据中是否存在异常数据;
8、若所述第一巡检数据中不存在所述异常数据,则以所述巡检通信点为新路线起点,基于所述初始巡检路线中的剩余路线生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对剩余的所述目标设备进行二次设备巡检;
9、若所述第一巡检数据中存在所述异常数据,则将所述异常数据所对应的所述目标设备标记为异常设备,并获取所述巡检机器人在采集所述异常数据时的数据采集参数;
10、以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线、所述数据采集参数和所述异常设备的目标设备位置生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检;
11、当所述巡检机器人完成所述二次设备巡检时,获取所述巡检机器人在所述二次设备巡检过程中采集的第二巡检数据。
12、可选的,所述运行信息包括运行状态和历史运行数据,所述设备属性包括设备价值和设备总运行时间,所述结合所述运行信息和所述设备属性确定所有所述目标设备的巡检优先级包括如下步骤:
13、统计所述巡检机器人的历史巡检次数;
14、根据所述历史运行数据统计各个所述目标设备的历史故障次数;
15、结合所述历史巡检次数和所述历史故障次数分别计算得到所有所述目标设备的故障权重;
16、计算所有所述目标设备的所述设备价值,得到设备总价值,结合所述设备总价值和所有所述设备价值分别计算得到所有所述目标设备的价值权重;
17、计算所有所述目标设备的所述设备总运行时间,得到设备总运行时间之和,结合所有所述设备总运行时间和所述总运行时间之和计算得到所有所述目标设备的运行时间权重;
18、将所述运行状态为关闭状态的所述目标设备的状态权重设定为0,并将所述运行状态为开启状态的所述目标设备的所述状态权重设定为预设权重常数;
19、结合所述故障权重、所述价值权重、所述运行时间权重和所述状态权重分别计算所有所述目标设备的巡检优先级。
20、可选的,所述以所述水电厂中预先设立的巡检通信点为路线中点,结合所述设备位置和所述巡检优先级生成巡检机器人的初始巡检路线,并控制所述巡检机器人根据所述初始巡检路线对所述目标设备进行一次设备巡检包括如下步骤:
21、获取巡检机器人的初始位置;
22、分别计算所有所述设备位置与所述初始位置之间的设备距离;
23、基于所述设备距离调整所有所述巡检优先级;
24、将调整后的所述巡检优先级按从大到小的顺序排序,得到排序结果;
25、以水电厂中预先设立的巡检通信点为路线中点,根据所述排序结果对应的所述设备位置生成所述巡检机器人的初始巡检路线,并控制所述巡检机器人根据所述初始巡检路线对所述目标设备进行一次设备巡检。
26、可选的,所述数据采集参数包括数据采集位置和数据采集模式,所述以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线、所述数据采集参数和所述异常设备的目标设备位置生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检包括如下步骤:
27、判断所述数据采集模式为图像采集模式或声音采集模式;
28、若所述数据采集模式为声音采集模式,则计算所述数据采集位置和所述目标设备位置之间的采集距离;
29、以所述目标设备位置为圆心并以所述采集距离为半径生成数据采集范围;
30、在所述数据采集范围内随机生成若干个二次数据采集点;
31、以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线和所有所述二次数据采集点生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检。
32、可选的,所述数据采集参数还包括图像拍摄角度,所述方法还包括如下步骤:
33、若所述数据采集模式为图像采集模式,则获取所述水电厂的三维模型图;
34、基于所述目标设备位置定位所述异常设备在所述三维模型图中对应的目标设备模型;
35、根据所述数据采集位置确定仿真采集点;
36、结合所述仿真采集点和所述图像拍摄角度进行模拟采集,在所述目标设备模型上生成第一模拟采集区域;
37、计算所述仿真采集点与所述目标设备模型之间的仿真采集距离;
38、以所述目标设备模型为旋转中心并以所述仿真采集距离为旋转半径调整所述仿真采集点,根据预设的旋转角度生成多个备选采集点;
39、基于所述图像拍摄角度分别在每个所述备选采集点进行模拟采集,生成多个第二模拟采集区域;
40、计算每个所述第二模拟采集区域与所述第一模拟采集区域的区域重合率,并将所述区域重合率最高的所述第二模拟采集区域作为目标模拟采集区域;
41、将所述目标模拟采集区域对应的所述备选采集点作为二次数据采集点;
42、以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线和所述二次数据采集点生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检。
43、第二方面,本发明还提供一种基于巡检机器人的水电厂智能巡检系统,所述系统包括:
44、信息获取模块,用于获取水电厂中所有目标设备的运行信息和设备信息,所述设备信息包括设备位置和设备属性;
45、优先级计算模块,用于结合所述运行信息和所述设备属性确定所有所述目标设备的巡检优先级;
46、第一巡检控制模块,用于以所述水电厂中预先设立的巡检通信点为路线中点,结合所述设备位置和所述巡检优先级生成巡检机器人的初始巡检路线,并控制所述巡检机器人根据所述初始巡检路线对所述目标设备进行一次设备巡检;
47、第一数据获取模块,用于当所述巡检机器人到达所述巡检通信点时,获取所述巡检机器人在所述一次设备巡检过程中采集的第一巡检数据;
48、数据分析模块,用于判断所述第一巡检数据中是否存在异常数据;
49、第二巡检控制模块,用于当所述数据分析模块的判断结果为所述第一巡检数据中不存在所述异常数据时,以所述巡检通信点为新路线起点,基于所述初始巡检路线中的剩余路线生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对剩余的所述目标设备进行二次设备巡检;
50、参数获取模块,用于当所述数据分析模块的判断结果为所述第一巡检数据中存在所述异常数据时,将所述异常数据所对应的所述目标设备标记为异常设备,并获取所述巡检机器人在采集所述异常数据时的数据采集参数;
51、第三巡检控制模块,用于以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线、所述数据采集参数和所述异常设备的目标设备位置生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检;
52、第二数据获取模块,用于当所述巡检机器人完成所述二次设备巡检时,获取所述巡检机器人在所述二次设备巡检过程中采集的第二巡检数据。
53、可选的,所述运行信息包括运行状态和历史运行数据,所述设备属性包括设备价值和设备总运行时间,所述优先级计算模块包括:
54、巡检统计单元,用于统计所述巡检机器人的历史巡检次数;
55、故障统计单元,用于根据所述历史运行数据统计各个所述目标设备的历史故障次数;
56、故障权重计算单元,用于结合所述历史巡检次数和所述历史故障次数分别计算得到所有所述目标设备的故障权重;
57、价值权重计算单元,用于计算所有所述目标设备的所述设备价值,得到设备总价值,结合所述设备总价值和所有所述设备价值分别计算得到所有所述目标设备的价值权重;
58、运行时间权重计算单元,用于计算所有所述目标设备的所述设备总运行时间,得到设备总运行时间之和,结合所有所述设备总运行时间和所述总运行时间之和计算得到所有所述目标设备的运行时间权重;
59、状态权重设定单元,用于将所述运行状态为关闭状态的所述目标设备的状态权重设定为0,并将所述运行状态为开启状态的所述目标设备的所述状态权重设定为预设权重常数;
60、优先级计算单元,用于结合所述故障权重、所述价值权重、所述运行时间权重和所述状态权重分别计算所有所述目标设备的巡检优先级。
61、可选的,所述第一巡检控制模块包括:
62、位置获取单元,用于获取巡检机器人的初始位置;
63、距离计算单元,用于分别计算所有所述设备位置与所述初始位置之间的设备距离;
64、优先级调整单元,用于基于所述设备距离调整所有所述巡检优先级;
65、排序单元,用于将调整后的所述巡检优先级按从大到小的顺序排序,得到排序结果;
66、第一巡检控制单元,用于以水电厂中预先设立的巡检通信点为路线中点,根据所述排序结果对应的所述设备位置生成所述巡检机器人的初始巡检路线,并控制所述巡检机器人根据所述初始巡检路线对所述目标设备进行一次设备巡检。
67、可选的,所述数据采集参数包括数据采集位置和数据采集模式,所述第三巡检控制模块包括:
68、采集模式判断单元,用于判断所述数据采集模式为图像采集模式或声音采集模式;
69、采集距离计算单元,用于当所述采集模式判断单元的判断结果为所述数据采集模式为所述声音采集模式时,计算所述数据采集位置和所述目标设备位置之间的采集距离;
70、采集范围生成单元,用于以所述目标设备位置为圆心并以所述采集距离为半径生成数据采集范围;
71、采集点生成单元,用于在所述数据采集范围内随机生成若干个二次数据采集点;
72、第二巡检控制单元,用于以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线和所有所述二次数据采集点生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检。
73、可选的,所述数据采集参数还包括图像拍摄角度,所述第三巡检控制模块还包括:
74、模型获取单元,用于当所述采集模式判断单元的判断结果为所述数据采集模式为所述图像采集模式时,获取所述水电厂的三维模型图;
75、模型定位单元,用于基于所述目标设备位置定位所述异常设备在所述三维模型图中对应的目标设备模型;
76、仿真点定位单元,用于根据所述数据采集位置确定仿真采集点;
77、第一采集区域生成单元,用于结合所述仿真采集点和所述图像拍摄角度进行模拟采集,在所述目标设备模型上生成第一模拟采集区域;
78、仿真距离计算单元,用于计算所述仿真采集点与所述目标设备模型之间的仿真采集距离;
79、备选点生成单元,用于以所述目标设备模型为旋转中心并以所述仿真采集距离为旋转半径调整所述仿真采集点,根据预设的旋转角度生成多个备选采集点;
80、第二采集区域生成单元,用于基于所述图像拍摄角度分别在每个所述备选采集点进行模拟采集,生成多个第二模拟采集区域;
81、区域选取单元,用于计算每个所述第二模拟采集区域与所述第一模拟采集区域的区域重合率,并将所述区域重合率最高的所述第二模拟采集区域作为目标模拟采集区域;
82、备选点选取单元,用于将所述目标模拟采集区域对应的所述备选采集点作为二次数据采集点;
83、第三巡检控制单元,用于以所述巡检通信点为新路线起点,结合所述初始巡检路线中的剩余路线和所述二次数据采集点生成二次巡检路线,控制所述巡检机器人根据所述二次巡检路线对所述异常设备和剩余的所述目标设备进行二次设备巡检。
84、本发明的有益效果是:
85、首先获取水电厂中所有目标设备的运行信息和设备信息,再结合运行信息和设备属性确定所有目标设备的巡检优先级。结合设备位置和巡检优先级生成巡检机器人的初始巡检路线,并进行一次设备巡检。当巡检机器人到达巡检通信点时,获取巡检机器人在一次设备巡检过程中采集的第一巡检数据。判断第一巡检数据中是否存在异常数据,若不存在异常数据,则基于初始巡检路线中的剩余路线生成二次巡检路线并进行二次设备巡检。若存在异常数据,将异常数据所对应的目标设备标记为异常设备,并获取巡检机器人在采集异常数据时的数据采集参数。结合初始巡检路线中的剩余路线、数据采集参数和异常设备的目标设备位置生成二次巡检路线并进行二次设备巡检。最终当巡检机器人完成二次设备巡检时,获取巡检机器人在二次设备巡检过程中采集的第二巡检数据。从而可以结合第一巡检数据而第二巡检数据进行综合分析,尽可能地排除环境因素对巡检数据造成的干扰,以提升巡检过程中数据分析的准确度。
- 还没有人留言评论。精彩留言会获得点赞!