一种无人热雾机的智能控制方法、系统及存储介质
本发明涉及农药智能喷洒,尤其涉及一种无人热雾机的智能控制方法、系统及存储介质。
背景技术:
1、烟雾一体机简称热雾机,热雾机既可以喷烟雾,又可以喷热雾,还可以喷冷雾,按行走方式分背负式热雾机、履带式热雾机和植保无人机上的飞行热雾机三种。热雾机广泛用于森林、橡胶林、城市花木园林、果树、甘蔗、玉米、水稻、小麦、烟草、花卉、大棚作物、城市卫生消杀等,传统喷雾器农药利用率只有30%左右,热雾机的农药利用率达90%以上,真正做到了省工,高杆作物和大棚作物一台机器可以替代20多个工人;省时,每亩地只需要2-3分钟;省水,每亩地只需要半斤(250毫升)水左右;省农药,每亩地可以减少50%以上的农药正常使用量,加入热雾渗透稳定剂,喷出的雾滴粒径在5微米以上50微米以下,雾滴可以控制在一定高度,喷洒区域形成立体雾状达到360度全覆盖无死角,叶片上每平方厘米雾滴粒数在100滴以上300滴以下,热雾机喷幅可达25米左右,每小时工作效率达30亩~120亩。然而,无人热雾机能够通过远程终端根据定位信息来控制无人热雾机的喷雾过程,使得无人热雾机能够在预定的区域对作物进行喷药,但是,现在的无人热雾机在施药的过程中可能会受到了干扰,导致了存在定位精度低的情况,不能够准确地对无人热雾机进行定位,进而使得无人热雾机产生了不能精确喷洒的现象。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种无人热雾机的智能控制方法、系统及存储介质。
2、为达上述目的,本发明采用的技术方案为:
3、本发明第一方面提供了一种无人热雾机的智能控制方法,包括以下步骤:
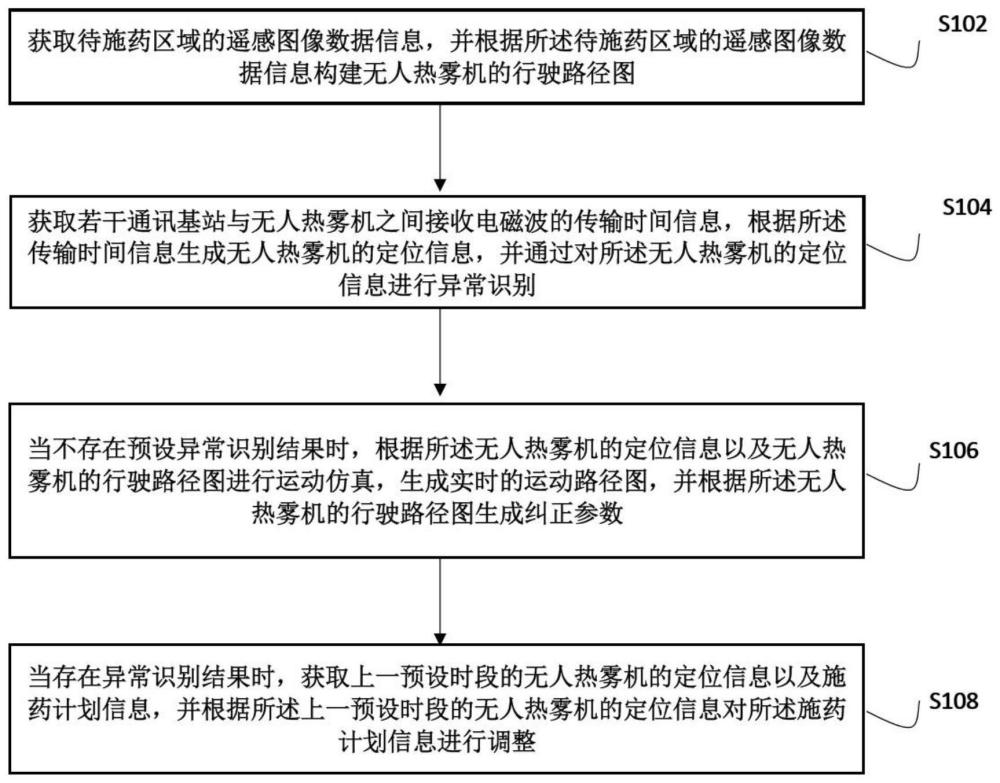
4、获取待施药区域的遥感图像数据信息,并根据所述待施药区域的遥感图像数据信息构建无人热雾机的行驶路径图;
5、获取若干通讯基站与无人热雾机之间接收电磁波的传输时间信息,根据所述传输时间信息生成无人热雾机的定位信息,并通过对所述无人热雾机的定位信息进行异常识别;
6、当不存在预设异常识别结果时,根据所述无人热雾机的定位信息以及无人热雾机的行驶路径图进行运动仿真,生成实时的运动路径图,并根据所述无人热雾机的行驶路径图生成纠正参数;
7、当存在异常识别结果时,获取上一预设时段的无人热雾机的定位信息以及施药计划信息,并根据所述上一预设时段的无人热雾机的定位信息对所述施药计划信息进行调整。
8、进一步的,在本方法中,获取待施药区域的遥感图像数据信息,并根据所述待施药区域的遥感图像数据信息构建无人热雾机的行驶路径图,具体包括:
9、获取待施药区域的遥感图像数据信息,通过对所述待施药区域的遥感图像数据信息进行灰度化处理,获取灰度化处理后的图像数据信息;
10、通过对所述灰度化处理后的图像数据信息进行滤波以及去噪处理,获取预处理后的图像数据信息,并对所述灰度化处理后的图像数据信息进行无人热雾机的行驶区域以及作物区域进行图像分割;
11、通过图像分割之后,获取无人热雾机的行驶区域图像以及作物区域进行图像,并通过对所述无人热雾机的行驶区域图像进行特征提取,获取无人热雾机的行驶区域的轮廓线;
12、基于所述无人热雾机的行驶区域的轮廓线构建无人热雾机的行驶路径图,并将所述无人热雾机的行驶路径图输出。
13、进一步的,在本方法中,根据所述传输时间信息生成无人热雾机的定位信息,具体包括:
14、获取电磁波在空气中的预估传播速度信息,并根据所述电磁波在空气中的预估传播速度信息以及传输时间信息计算出预设时间之内基站与无人热雾机之间的若干个欧式距离值,同时,获取基站所在的地理位置信息;
15、以所述基站所在的地理位置信息作为起点,根据所述起点以及欧式距离值构建特征向量,引入余弦度量算法,并根据所述余弦度量算法计算所述特征向量之间的余弦值;
16、判断所述余弦值是否大于预设余弦阈值,当所述余弦值大于预设余弦阈值时,将所述余弦值大于预设余弦阈值对应的特征向量作为异常的特征向量,并获取异常的特征向量对应的欧式距离值,将所述异常的特征向量对应的欧式距离值剔除;
17、当所述余弦值不大于预设余弦阈值时,将所述余弦值不大于预设余弦阈值对应的特征向量作为正常的特征向量,并将正常的特征向量所对应的欧式距离值作为参考欧式距离值,根据所述参考欧式距离值以及基站所在的地理位置信息计算出无人热雾机的定位信息。
18、进一步的,在本方法中,通过对所述无人热雾机的定位信息进行异常识别,具体包括:
19、判断所述传输时间信息之内是否出现过信息传输间断的情况,当所述传输时间信息之内没有出现过信息传输间断的情况时,将所述无人热雾机的定位信息作为最终的无人热雾机的定位信息;
20、当所述传输时间信息之内出现过信息传输间断的情况时,获取所述传输时间信息出现过信息传输间断的次数信息,并判断所述次数信息是否大于预设次数信息;
21、当所述次数信息大于预设次数信息时,将当前无人热雾机的定位信息作为异常的无人热雾机的定位信息,生成异常识别结果;
22、当所述次数信息不大于预设次数信息时,当前无人热雾机的定位信息作为最终的无人热雾机的定位信息。
23、进一步的,在本方法中,根据所述无人热雾机的定位信息以及无人热雾机的行驶路径图进行运动仿真,生成实时的运动路径图,并根据所述无人热雾机的行驶路径图生成纠正参数,具体包括:
24、构建虚拟空间,并将所述无人热雾机的行驶路径图输入到所述虚拟空间中,同时,获取无人热雾机的三维模型图,将所述无人热雾机的三维模型图输入到所述虚拟空间中;
25、根据所述无人热雾机的三维模型图对所述虚拟空间中的无人热雾机的三维模型图进行调整,生成当前时间戳的实时仿真模型图,并构建时间戳;
26、获取每个时间戳的实时仿真模型图,结合所述每个时间戳的实时仿真模型图对无人热雾机的施药过程进行运动仿真,生成实时的运动路径图;
27、当所述无人热雾机的定位信息更新时,对所述无人热雾机的定位信息进行纠偏,生成纠正参数。
28、进一步的,在本方法中,当存在异常识别结果时,获取上一预设时段的无人热雾机的定位信息以及施药计划信息,根据所述上一预设时段的无人热雾机的定位信息对所述施药计划信息进行调整,具体包括:
29、当存在异常识别结果时,则获取上一预设时段的无人热雾机的定位信息以及施药计划信息,并获取产生异常的时间信息以及无人热雾机单位时间内的平均施药量信息;
30、根据所述产生异常的时间信息以及无人热雾机单位时间内的平均施药量信息计算出无人热雾机在产生异常的时间之内的预估施药区域;
31、根据所述上一预设时段的无人热雾机的定位信息以及施药计划信息计算出剩余的施药计划信息,根据所述无人热雾机在产生异常的时间之内的预估施药区域对所述剩余的施药计划信息进行调整,生成调整信息。
32、本发明第二方面提供了一种无人热雾机的智能控制系统,所述控制系统包括存储器以及处理器,所述存储器中包括无人热雾机的智能控制方法程序,所述无人热雾机的智能控制方法程序被所述处理器执行时,实现如下步骤:
33、获取待施药区域的遥感图像数据信息,并根据所述待施药区域的遥感图像数据信息构建无人热雾机的行驶路径图;
34、获取若干通讯基站与无人热雾机之间接收电磁波的传输时间信息,根据所述传输时间信息生成无人热雾机的定位信息,并通过对所述无人热雾机的定位信息进行异常识别;
35、当不存在预设异常识别结果时,根据所述无人热雾机的定位信息以及无人热雾机的行驶路径图进行运动仿真,生成实时的运动路径图,并根据所述无人热雾机的行驶路径图生成纠正参数;
36、当存在异常识别结果时,获取上一预设时段的无人热雾机的定位信息以及施药计划信息,并根据所述上一预设时段的无人热雾机的定位信息对所述施药计划信息进行调整。
37、进一步的,在本系统中,根据所述传输时间信息生成无人热雾机的定位信息,具体包括:
38、获取电磁波在空气中的预估传播速度信息,并根据所述电磁波在空气中的预估传播速度信息以及传输时间信息计算出预设时间之内基站与无人热雾机之间的若干个欧式距离值,同时,获取基站所在的地理位置信息;
39、以所述基站所在的地理位置信息作为起点,根据所述起点以及欧式距离值构建特征向量,引入余弦度量算法,并根据所述余弦度量算法计算所述特征向量之间的余弦值;
40、判断所述余弦值是否大于预设余弦阈值,当所述余弦值大于预设余弦阈值时,将所述余弦值大于预设余弦阈值对应的特征向量作为异常的特征向量,并获取异常的特征向量对应的欧式距离值,将所述异常的特征向量对应的欧式距离值剔除;
41、当所述余弦值不大于预设余弦阈值时,将所述余弦值不大于预设余弦阈值对应的特征向量作为正常的特征向量,并将正常的特征向量所对应的欧式距离值作为参考欧式距离值,根据所述参考欧式距离值以及基站所在的地理位置信息计算出无人热雾机的定位信息。
42、进一步的,在本系统中,通过对所述无人热雾机的定位信息进行异常识别,具体包括:
43、判断所述传输时间信息之内是否出现过信息传输间断的情况,当所述传输时间信息之内没有出现过信息传输间断的情况时,将所述无人热雾机的定位信息作为最终的无人热雾机的定位信息;
44、当所述传输时间信息之内出现过信息传输间断的情况时,获取所述传输时间信息出现过信息传输间断的次数信息,并判断所述次数信息是否大于预设次数信息;
45、当所述次数信息大于预设次数信息时,将当前无人热雾机的定位信息作为异常的无人热雾机的定位信息,生成异常识别结果;
46、当所述次数信息不大于预设次数信息时,当前无人热雾机的定位信息作为最终的无人热雾机的定位信息。
47、本发明第三方面提供了一种计算机可读存储介质,所述计算机可读存储介质中包括无人热雾机的智能控制方法程序,所述无人热雾机的智能控制方法程序被处理器执行时,实现任一项所述的无人热雾机的智能控制方法的步骤。
48、本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
49、本发明通过获取待施药区域的遥感图像数据信息,并根据所述待施药区域的遥感图像数据信息构建无人热雾机的行驶路径图,获取若干通讯基站与无人热雾机之间接收电磁波的传输时间信息,根据所述传输时间信息生成无人热雾机的定位信息,并通过对所述无人热雾机的定位信息进行异常识别,当不存在预设异常识别结果时,根据所述无人热雾机的定位信息以及无人热雾机的行驶路径图进行运动仿真,生成实时的运动路径图,并根据所述无人热雾机的行驶路径图生成纠正参数,当存在异常识别结果时,获取上一预设时段的无人热雾机的定位信息以及施药计划信息,并根据所述上一预设时段的无人热雾机的定位信息对所述施药计划信息进行调整。本发明通过融合余弦度量算法能够对连续采集的定位数据进行识别,从而剔除受到异常的定位数据,提高无人热雾机在喷洒过程中的定位精度,从而提高药物的喷洒精度。其次,通过对某一时间段内出现异常现象时,生成相关的停止喷洒指令,从而避免出现电磁干扰、定位数据异常现象时还继续喷洒的情况,进而避免了出现异常情况时的乱喷、重喷现象。
- 还没有人留言评论。精彩留言会获得点赞!