一种冗余位置反馈的波荡器运动控制系统
本技术属于运动控制,具体涉及一种冗余位置反馈的波荡器运动控制系统。
背景技术:
1、波荡器是先进同步辐射光源及自由电子激光的主要发光器件,电子束流要通过波荡器内部交替排列的磁块才能发出高亮度的光。运动控制系统是波荡器不可或缺的重要组成部分,其主要任务是完成包括波荡器上、下磁极间隙gap、上下磁极夹角(taper)的高精度运动调节,进而调节辐射光的波长。波荡器运动控制在同步辐射光源及自由电子激光的波荡器磁极运动及后期的运行维护工作中发挥重要作用,因此研制高可靠性、高安全性、高精度、多重保护的波荡器运动控制具有重要意义。
2、调研国内外各粒子加速器光源的波荡器,其中国外波荡器以欧洲x射线自由电子激光装置(简称european xfel)和美国斯坦福大学直线加速器相干光源ii(简称lcls ii)为主要代表,国内以上海同步辐射光源(简称ssrf)、北京高能物理研究所研制的波荡器为主要代表,发现主要通过控制四套传动机构实现磁极间隙(gap)、上下磁极夹角(taper)的运动,波荡器常见的运动控制模式:gap模式、taper模式、center模式、维护模式,如图1a-图1d所示。欧洲x射线自由电子激光装置(简称european xfel)研制的四轴运动的波荡器见参考文献【the undulator control system for the european xfel,proceedings of ipac2012,new orleans,louisiana,usa】,美国斯坦福大学直线加速器相干光源ii(简称lclsii)研制的四轴运动的波荡器见参考文献【lcls-ii undulator motion control,16thint.conf.on accelerator and large experimental control systems icalepcs2017,barcelona,spain jacow publishing】。
3、european xfel和lcls ii的波荡器的本地运动控制系统都采用的方案架构采用控制机箱+4套伺服电机+2套光栅尺+2套倾角仪,波荡器的本地运动控制系统的结构配置布局如图2所示,其中两套光栅尺分别设置在波荡器的入口端部和出口端部。这种波荡器的本地运动控制系统在波荡器的运行过程中可能会存在以下问题:
4、(1)由于安装的光栅尺距离束流位置较近,所以调束流过程中,束流击中光栅尺的概率增大;
5、(2)由于安装的光栅尺距离束流位置较近,产生的辐射,可能导致光栅尺“死机”或“读数值”跳变;
6、(3)由于只有两套光栅尺,所以使用光栅尺作为位置反馈时,不能实现波荡器的上磁极大梁和下磁极大梁同时向上运动或向下运动(中心模式);
7、(4)如果使用入口和出口的光栅尺作为反馈,则如图2所示下磁极大梁的传动轴二和传动轴四带动大梁向y轴方向平移运动,y轴方向是竖直方向,下磁极大梁两个传动轴使用伺服电机内部的电机编码器的修正值作为反馈,而上磁极大梁的传动轴一和传动轴三的沿y轴的运动则根据光栅尺的读数进行控制,光栅尺只能反馈上磁极大梁入口和上磁极大梁出口在y轴方向上的位置值,故调节波荡器的上、下磁极间隙(gap)和上下磁极夹角(taper),不能完全使用光栅尺反馈调节。具体来说,如图2所示下磁极大梁两个传动轴分别是传动轴二和传动轴四,上磁极大梁两个传动轴分别是传动轴一和传动轴三,其中传动轴一会带动入口端上磁极大梁运动,传动轴三会带动出口端上磁极大梁运动,传动轴二会带动入口端下磁极大梁运动,传动轴四会带动出口端下磁极大梁运动,故通过控制传动轴带动大梁的运动就可是实现gap和taper的调节。如图2和图1a所示,传动轴一和传动轴三带动上磁极大梁往y轴正向运动,传动轴二和传动轴四带动下磁极大梁往y轴负向运动,gap会增大。如图2和图1b所示,传动轴一和传动轴二保持不动,传动轴三带动出口端的上磁极大梁往y轴正向运动和传动轴四带动出口端的下磁极大梁往y轴负向运动,taper会增大。入口处的gap是入口处的一套光栅尺和一套电机编码器(或两套电机编码器)读数之和,出口处的gap是出口处的一套光栅尺和一套电机编码器(或两套电机编码器)读数之和。taper调节是波荡器实际运动需求之一,通过入口的传动轴一和传动轴二保持不动,而传动轴三和传动轴四分别带动上磁极大梁出口和下磁极大梁出口沿着y轴相反方向运动,就可调节上下磁极夹角(taper)范围一般是0°~0.005°;两个倾角仪分别读取上下磁极大梁的倾角,在逻辑控制模块中要求上下磁极大梁的倾角不允许超过0.01°,防止大梁变形,造成机械破坏,所以倾角仪用于防止大梁超过0.01°的倾斜,保护磁极大梁。如图2所示,european xfel和lcls ii的四轴波荡器只有两套光栅尺,故使用光栅尺反馈时,光栅尺只能用于反馈和监测上磁极大梁入口和出口的位置,下磁极大梁入口和出口的位置需要使用电机编码器反馈和监测;或者也可以全部使用电机编码器分别监测和反馈上大梁入口和出口的位置、下磁极大梁入口和出口的位置。
8、如图3所示,北京高能物理研究所研制的波荡器研制的四轴运动的cpmu波荡器见参考文献【高能同步辐射光源heps插入件控制系统研究,赵述涛,2021年12月】,其运动控制采用的方案架构为:控制机柜+4套自带旋转变压器的伺服电机+4套光栅尺,其中4套光栅尺分别光栅尺在波荡器的入口上端部、出口上端部、入口下端部、出口下端部的附近;cpmu伺服电机内部是旋转变压器,用于反馈电机运动速度,cpmu无倾角仪器,去防止大梁变形。这种控制方案在波荡器运行过程中会存在以下不足:
9、(1)没有使用倾角仪冗余保护,当光栅尺反馈位置故障时,电机运动可能导致磁极大梁倾斜出现倾角,甚至导致磁极大梁变形;
10、(2)伺服电机内的旋转变压器用于电机的速度反馈控制,由于没有设置用于电机的位置和速度反馈控制的电机编码器,因此,没有用于冗余的位置反馈、位置监测保护。
11、针对上述问题,现有技术中,若光栅尺出现异常现象(“死机”或“读数值”跳变现象),通常需要工作人员到波荡器本地控制机柜对光栅尺断电重启,恢复其正常工作;若光栅尺出现损坏时,需要打开加速器隧道,更换光栅尺。所以现有技术费时费力,导致不能快速高效解决问题,给同步辐射光源或自由电子激光装置的运行维护带来不便,影响用户的供光机时。
12、然而,随着用户对供光品质、机时的要求提升和新一代光源的建造需求,加速器装置的长度已经从百米量级上升为千米量级,例如正在建设的上海硬x射线自由电子激光装置全长3.11km,埋深29米,这给波荡器运行维护,甚至加速器运行维护带来极大的挑战,故需要对现有的波荡器运动控制技术进行优化,研制高可靠性、高安全性、高精度、多重保护、冗余位置反馈的波荡器运动控制具有重要意义。
技术实现思路
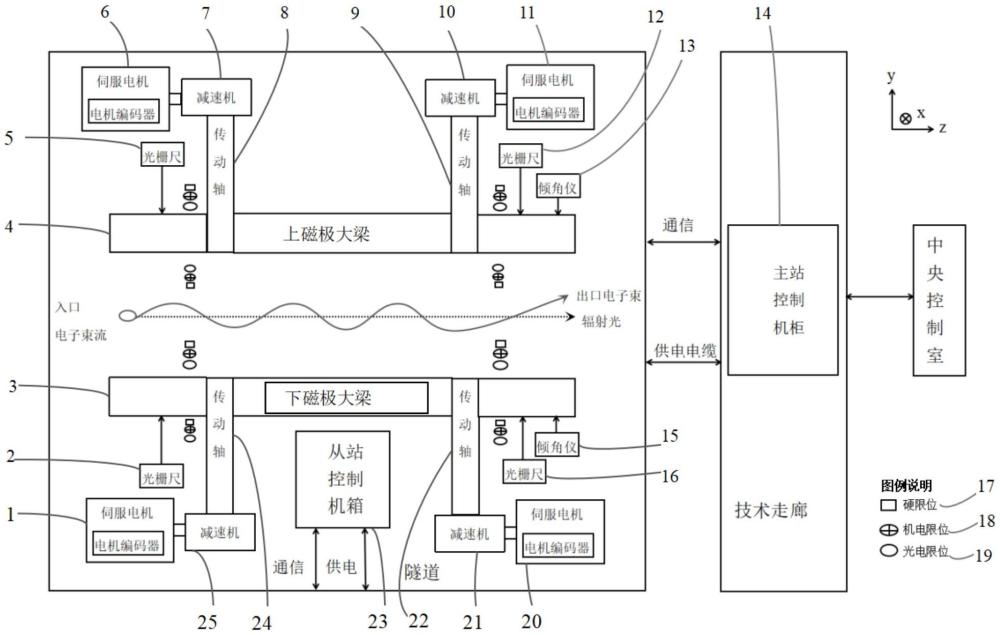
1、本实用新型的目的在于提供一种冗余位置反馈的波荡器运动控制系统,可用于正在建设的上海硬x射线自由电子激光装置(shine工程)或先进粒子加速器光源,以实现冗余位置反馈和保护。
2、为了实现上述目的,本实用新型提供一种冗余位置反馈的波荡器运动控制系统,包括:
3、4套光栅尺,其分别安装于波荡器的入口上端、入口下端、出口上端和出口下端;
4、4套伺服电机,其分别安装于波荡器的入口上端、入口下端、出口上端和出口下端并且具有电机编码器,并通过传动轴与波荡器连接;
5、2套倾角仪,其分别安装在波荡器的出口上端的附近及波荡器的出口下端的附近;
6、光电限位、机电限位、硬限位、急停按钮、报警器、和指示灯;以及
7、从站控制机箱,其包括plc控制器、以及与所述plc控制器连接的伺服驱动器、位置输入模块、模拟输入模块、数字输入模块、和数字输出模块;其中,plc控制器上设有运动控制模块和逻辑控制模块;所述伺服驱动器与所述伺服电机相连并且通过nc控制器与所述运动控制模块连接;所述位置输入模块与4套光栅尺均相连,并且通过nc控制器与所述运动控制模块相连;所述模拟输入模块与2套倾角仪相连,并且与所述逻辑控制模块相连;所述数字输入模块与光电限位、机电限位和急停按钮均相连,并且与逻辑控制模块相连;所述数字输出模块与指示灯和报警器均相连,并且与逻辑控制模块相连。
8、所述光电限位、机电限位、硬限位均安装在上磁极大梁入口上附近、上磁极大梁出口上附近、下磁极大梁入口下附近及下磁极大梁出口下附近,用于波荡器运动到最大间隙位置和最小间隙位置的三重限位保护。
9、所述的冗余位置反馈的波荡器运动控制系统还包括主站控制机柜,所述主站控制机柜安装在技术走廊,在本地模式时可用于发送控制命令给控制从站控制机箱和读取从站控制机箱的状态,在远程模式时主站控制机柜设置为和中央控制室交互信息。
10、所述运动控制模块设置为向伺服驱动器发出运动的位置、速度的命令,以控制伺服电机的运动。
11、所述伺服驱动器的数量为2个,每个伺服驱动器与2套伺服电机相连;所述伺服驱动器设置为响应于运动控制模块发送给伺服驱动器的位置、速度的命令以及电机编码器反馈给伺服驱动器的位置、速度、扭矩信号,控制伺服电机的位置、速度和力矩,并将电机编码器反馈给伺服驱动器的位置、速度、扭矩信号发送给运动控制模块以作为运动控制模块的输入变量。
12、所述位置输入模块设置为获取光栅尺读数,然后将光栅尺读数通过nc控制器传递给运动控制模块,作为运动控制模块的输入变量。
13、所述数字输出模块设置为将逻辑控制模块的输出变量转化为开关量,并传递给指示灯和报警器;所述逻辑控制模块设置为:在发生故障时,逻辑控制模块的输出变量的信号值置1,通过数字输出模块将信号值为1的逻辑控制模块的输出变量转化为表示导通的开关量并传递给指示灯和报警器,使得指示灯显示红色,报警器发出故障警报;否则,逻辑控制模块的输出变量的信号值置0,通过数字输出模块将信号值为0的逻辑控制模块的输出变量转化为表示关断的开关量并传递给指示灯和报警器,使得指示灯熄灭,报警器停止发出故障警报。
14、所述模拟输入模块设置为获取倾角仪的数据,然后将倾角仪的数据传给逻辑控制模块;所述逻辑控制模块包括一个倾角比较模块,所述倾角比较模块设置为比较倾角仪的读数和倾角最大值;
15、所述逻辑控制模块设置为:根据倾角比较模块的比较结果,在倾角仪的读数超过倾角最大值,说明发生故障,则运动控制模块向伺服驱动器发送使伺服电机停止运动的停止命令,同时逻辑控制模块的输出变量的信号值置1,通过数字输出模块将信号值为1的逻辑控制模块的输出变量转化为表示导通的开关量并传递给指示灯和报警器,使得指示灯显示红色,报警器发出故障警报;在监测波荡器大梁的倾角小于等于倾角最大值时,则运动控制模块向伺服驱动器发送使伺服电机恢复运动的恢复命令,同时逻辑控制模块的输出变量的信号值置0,通过数字输出模块将信号值为0的逻辑控制模块的输出变量转化为表示关断的开关量并传递给指示灯和报警器,使得指示灯熄灭,报警器停止发出故障警报。
16、所述数字输入模块设置为把限位开关中的光电限位和机电限位的触发信号、和急停按钮的表示导通的开关量信号转化为数字输入信号,然后将数字输入信号传给plc控制器的逻辑控制模块,作为逻辑控制模块的输入变量;
17、所述数字输入模块设置为:在光电限位和机电限位被触发时,通过数字输入模块将光电限位和机电限位的触发信号转化为信号值为1的数字输入信号,并将信号值为1的数字输入信号发送给plc控制器的逻辑控制模块以作为逻辑控制模块的输入变量,逻辑控制模块的输入变量为1使得逻辑控制模块向伺服驱动器发送使伺服电机停止运动的停止命令;同时逻辑控制模块的输出变量的信号值置1,通过数字输出模块将信号值为1的逻辑控制模块的输出变量转化为表示导通的开关量并传递给指示灯和报警器,使得指示灯显示红色,报警器发出故障警报;
18、所述数字输入模块设置为:按下急停按钮以发出表示导通的开关量信号,通过数字输入模块将急停按钮的开关量信号转化为信号值为1的数字输入信号,并将数字输入信号发送给plc控制器的逻辑控制模块以作为逻辑控制模块的输入变量,逻辑控制模块的输入变量为1使得逻辑控制模块向伺服驱动器发送使伺服电机停止运动的停止命令。
19、本实用新型的冗余位置反馈的波荡器运动控制系统采用双位置反馈的全闭环控制,具有响应速度快、高动态性能、控制精度高。因为使用光栅尺作为全闭环控制的位置反馈,直接监测反馈大梁的四个位置值(gvl.enup_encoder、gvl.exup_encoder、gvl.endn_encoder、gvl.exup_encoder),计算得到的传动轴位移量gvl.move_gap_c作为伺服驱动器控制伺服电机运动的目标值,最后伺服电机根据电机编码器的位置反馈调整传动轴的位移量达到目标值。
20、此外,本实用新型采用的伺服电机内部的电机编码器可作为大梁冗余位置反馈保护。一般情况下波荡器优先使用光栅尺作为闭环控制的位置反馈直接监测反馈大梁的四个位置值,而四个伺服电机内部的电机编码器作为冗余位置反馈,间接监测反馈大梁的四个位置值,所以即使光栅尺出现故障时,电机编码器作为冗余位置反馈,可以防止电机继续转动,导致出现单梁倾角、单梁超差、单轴超差、gap超差、taper超差等问题。
21、本实用新型采用的伺服电机内部的电机编码器也可作为闭环控制位置反馈元件。当光栅尺出现故障时,在远程控制就可以操作电机编码器替换光栅尺,作为波荡器闭环运动控制的位置反馈,立即恢复波荡器运动控制的正常工作。
22、本实用新型采用的波荡器在波荡器磁极大梁出现倾斜时,一端传动轴的扭矩就会增大,把驱动器实时读取的电机输出扭矩在控制逻辑程序中,不允许超过许可扭矩值,从而防止大梁变形破坏;同时还可以防止波荡器在最大gap和最小gap超差时与硬限位破坏性碰撞。
23、本实用新型远程操作,简单、安全、可靠,为同步辐射光源或自由电子激光装置的波荡器运动控制的运行维护提供了便利。
- 还没有人留言评论。精彩留言会获得点赞!