一种智能磨砂板的控制方法、设备、装置及介质与流程
本发明涉及康复训练器械领域,特别是涉及一种智能磨砂板的控制方法、设备、装置及介质。
背景技术:
1、智能磨砂板是一种常见的康复医疗设备。为了方便硬件接线,节省硬件输入/输出(input/output,io)口使用,在智能磨砂板上灯珠和磁场传感器通常采用串行级联控制。如灯珠板奇数行从左到右串联,偶数行从右到左串联。多个磁场传感器串联成一个磁场传感器板,各个磁场传感器板又依次串联。
2、在相关的智能磨砂板控制技术中,当磁性物体沿着运动轨迹移动时,主控板直接根据读取到的磁场传感器的位置控制与磁场传感器对应的灯珠熄灭。但是在磁场传感器串行阵列中,发生个别磁场传感器坏掉或者受到干扰时,就会导致串行读取的位置错误,灯珠熄灭错误,使得对训练位置的误判。
3、由此可见,如何提高智能磨砂板控制的准确性是本领域人员亟需解决的技术问题。
技术实现思路
1、本发明的目的是提供一种智能磨砂板的控制方法、设备、装置及介质,以解决现有的智能磨砂板控制不准确的技术问题。
2、为解决上述技术问题,本发明提供一种智能磨砂板的控制方法,应用于包括led阵列、磁场传感器阵列、主控板、上位机的智能磨砂板的控制装置,其中,所述led阵列由led灯带串联形成,所述磁场传感器阵列中各磁场传感器串联;led与所述磁场传感器一一对应,且各所述磁场传感器在对应的所述led位置处;所述主控板的一个io端口与所述led阵列的输入端连接,所述主控板的另一个io端口与所述磁场传感器阵列的输出端连接,所述主控板与所述上位机连接;所述方法应用于所述主控板,所述方法包括:
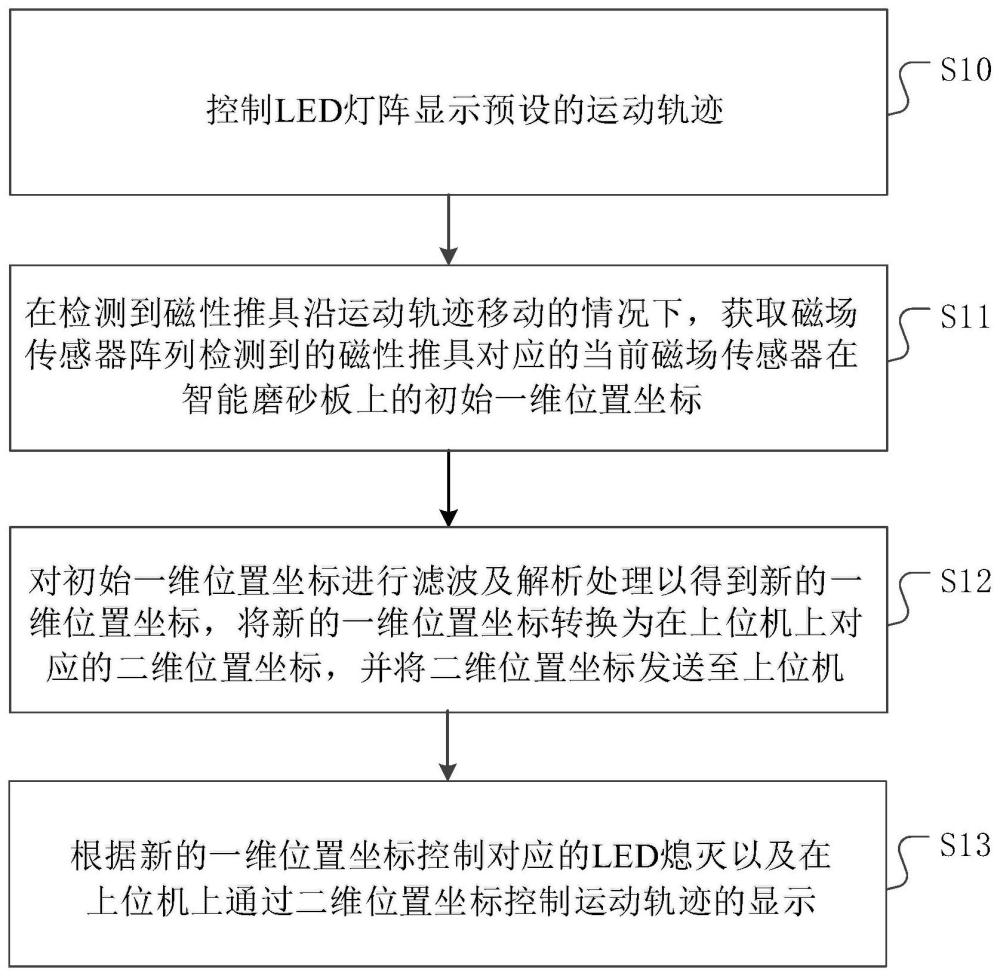
3、控制led灯阵显示预设的运动轨迹;
4、在检测到磁性推具沿所述运动轨迹移动的情况下,获取所述磁场传感器阵列检测到的所述磁性推具对应的当前磁场传感器在所述智能磨砂板上的初始一维位置坐标;
5、对所述初始一维位置坐标进行滤波及解析处理以得到新的一维位置坐标,将所述新的一维位置坐标转换为在所述上位机上对应的二维位置坐标,并将所述二维位置坐标发送至所述上位机;
6、根据所述新的一维位置坐标控制对应的led熄灭以及在所述上位机上通过所述二维位置坐标控制所述运动轨迹的显示。
7、优选地,每预设数量的所述磁场传感器位于一个磁场传感器板上,且所述磁场传感器板上包括各所述磁场传感器连接的寄存器;在所述获取所述磁场传感器阵列检测到的所述磁性推具对应的当前磁场传感器在所述智能磨砂板上的初始一维位置坐标之前,还包括:
8、设置各所述磁场传感器板上的并行输入引脚为低电平并获取并行输入数据,并将所述并行输入数据存储至对应的所述寄存器中;
9、自设置各所述磁场传感器板上的并行输入引脚为低电平开始,预设时长内设置各所述磁场传感器板上的并行输入引脚为高电平,以停止获取所述并行输入数据;
10、根据各所述寄存器中存储的所述预设时长内的所述并行输入数据确定各所述磁场传感器在所述预设时长内的电平状态;
11、对应地,所述获取所述磁场传感器阵列检测到的所述磁性推具对应的当前磁场传感器在所述智能磨砂板上的初始一维位置坐标包括:
12、根据各所述磁场传感器在所述预设时长内的电平状态确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器;
13、获取所述当前磁场传感器在所述智能磨砂板上的所述初始一维位置坐标。
14、优选地,所述根据各所述磁场传感器在所述预设时长内的电平状态确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器包括:
15、根据各所述磁场传感器在所述预设时长内的电平状态确定各所述磁场传感器的当前状态;
16、将各所述磁场传感器的当前状态与各所述磁场传感器在所述预设时长内的电平状态进行对比,以确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器。
17、优选地,所述根据各所述磁场传感器在所述预设时长内的电平状态确定各所述磁场传感器的当前状态包括:
18、创建二维数组;其中,所述二维数组的行下标用于表征各所述磁场传感器的编号,所述二维数据的列下标用于表征缓存长度;
19、按照所述二维数组的形式将每次采样到的所述磁场传感器的数据放入到缓存队列的队尾,并舍弃所述缓存队列队首的数据;
20、在检测到所述缓存队列中的电平状态中有大于或等于预设数量的电平状态为低电平,则确定当前检测到的所述磁场传感器的当前状态为低电平;反之,则确定当前检测到的所述磁场传感器的当前状态为高电平;
21、对应地,所述将各所述磁场传感器的当前状态与各所述磁场传感器在所述预设时长内的电平状态进行对比,以确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器包括:
22、从当前次获取当前状态开始,获取在当前次之前的第一预设次数内所述磁场传感器的历史状态;
23、若检测到当前状态与所述历史状态不相同,且所述历史状态为高电平,则确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器;
24、若检测到当前状态与所述历史状态相同,且均为高电平,则确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器不存在;
25、若检测到当前状态与所述历史状态相同,且均为低电平,则确定所述磁场传感器阵列检测到的所述磁性推具对应的所述当前磁场传感器故障。
26、优选地,所述对所述初始一维位置坐标进行滤波及解析处理以得到新的一维位置坐标包括:
27、对所述初始一维位置坐标进行滤波处理,以得到滤波后的一维位置坐标;
28、将所述滤波后的一维位置坐标进行解析处理以得到所述新的一维位置坐标。
29、优选地,所述对所述初始一维位置坐标进行滤波处理,以得到滤波后的一维位置坐标包括:
30、将所述初始一维位置坐标与移动轨迹进行比较并获取比较结果;
31、从所有的所述初始一维位置坐标中过滤所述比较结果不满足预设要求的所述初始一维位置坐标;
32、将所述比较结果满足所述预设要求的所述初始一维位置坐标作为所述滤波后的一维位置坐标。
33、优选地,所述将所述初始一维位置坐标与移动轨迹进行比较并获取比较结果包括:
34、从当前次获取当前初始一维位置坐标开始,获取当前次之前的第二预设次数内的历史初始一维位置坐标,以根据所述历史初始一维位置坐标形成所述移动轨迹;
35、获取当前次之前的第二预设次数内的历史初始一维位置坐标的平均坐标;
36、将当前初始一维位置坐标与所述平均坐标之间的相对距离进行比较并获取比较结果;
37、对应地,所述将所述比较结果满足所述预设要求的所述初始一维位置坐标作为所述滤波后的一维位置坐标包括:
38、若检测到所述比较结果满足所述相对距离小于预设值,则将当前初始一维位置坐标作为所述滤波后的一维位置坐标。
39、为了解决上述技术问题,本发明还提供一种智能磨砂板的控制设备,应用于包括led阵列、磁场传感器阵列、主控板、上位机的智能磨砂板的控制装置,其中,所述led阵列由led灯带串联形成,所述磁场传感器阵列中各磁场传感器串联;led与所述磁场传感器一一对应,且各所述磁场传感器在对应的所述led位置处;所述主控板的一个io端口与所述led阵列的输入端连接,所述主控板的另一个io端口与所述磁场传感器阵列的输出端连接,所述主控板与所述上位机连接;所述控制设备包括:
40、第一控制模块,用于控制led灯阵显示预设的运动轨迹;
41、获取模块,用于在检测到磁性推具沿所述运动轨迹移动的情况下,获取所述磁场传感器阵列检测到的所述磁性推具对应的当前磁场传感器在所述智能磨砂板上的初始一维位置坐标;
42、处理及发送模块,用于对所述初始一维位置坐标进行滤波及解析处理以得到新的一维位置坐标,将所述新的一维位置坐标转换为在所述上位机上对应的二维位置坐标,并将所述二维位置坐标发送至所述上位机;
43、第二控制模块,用于根据所述新的一维位置坐标控制对应的led熄灭以及在所述上位机上通过所述二维位置坐标控制所述运动轨迹的显示。
44、为了解决上述技术问题,本发明还提供一种智能磨砂板的控制装置,包括:
45、存储器,用于存储计算机程序;
46、处理器,用于执行所述计算机程序时实现上述的智能磨砂板的控制方法的步骤。
47、为了解决上述技术问题,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述的智能磨砂板的控制方法的步骤。
48、本发明所提供的一种智能磨砂板的控制方法,应用于包括led阵列、磁场传感器阵列、主控板、上位机的智能磨砂板的控制装置,该方法应用于主控板,包括:控制led灯阵显示预设的运动轨迹;在检测到磁性推具沿运动轨迹移动的情况下,获取磁场传感器阵列检测到的磁性推具对应的当前磁场传感器在智能磨砂板上的初始一维位置坐标;对初始一维位置坐标进行滤波及解析处理以得到新的一维位置坐标,将新的一维位置坐标转换为在上位机上对应的二维位置坐标,并将二维位置坐标发送至上位机;根据新的一维位置坐标控制对应的led熄灭以及在上位机上通过二维位置坐标控制运动轨迹的显示。该方法中,在获取到磁性推具对应的磁场传感器在智能磨砂板上的初始一维位置坐标后,对初始一维位置坐标进行滤波处理,增强了抗干扰能力,尽可能地避免了磁场传感器坏掉或者受到干扰时导致的串行读取的位置错误的发生,提高了读取到的位置的准确性,进而根据较准确的位置实现对灯珠的较准确的控制;另外,在滤波及解析处理后得到的新的一维位置坐标转换为在上位机上对应的二维位置坐标,实现了智能磨砂板上灯珠的亮灭所展示的运动轨迹同样能够在上位机的显示屏上进行显示,方便用户了解到使用智能磨砂板的患者的训练情况。
49、此外,本发明还提供一种智能磨砂板的控制设备、智能磨砂板的控制装置以及计算机可读存储介质,与上述提到的智能磨砂板的控制方法具有相同或相对应的技术特征,效果同上。
- 还没有人留言评论。精彩留言会获得点赞!