基于改进蚁群算法的深海采矿车路径规划方法及系统
本发明涉及海洋工程,具体提供一种基于改进蚁群算法的深海采矿车路径规划方法及系统。
背景技术:
1、深海蕴藏丰富的多金属结核、富钴结壳和多金属硫化物等矿产资源,其中多金属结核中富含锰、铜、钴、镍等稀有贵金属元素,极具商业开采价值。不同于富钴结壳和多金属硫化物矿床,深海多金属结核赋存于水深 4000m-6000m的海底沉积物表层,往往处于半埋藏状态,矿区表层为稀软沉积物,整体地形较为平坦,伴有小突起障碍和沟壑。
2、路径规划是保障深海采矿车能够安全完成采矿作业的重要基础技术,对于深海采矿车高效完成采矿作业,降低能耗以及安全行驶都具有重要的实际意义。合理的路径规划方案可以保证采矿车在既定的海底采矿区域根据预先设定的路径进行安全行驶,有效减小采矿车在采矿地点转移、矿石输送过程中的路程与时间成本、降低行驶风险。
3、现有技术中,通常通过蚁群算法来寻找深海采矿的最优路径,蚁群算法的基本思路为:用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题的解空间,路径较短的蚂蚁释放的信息素量较多,随着时间的推进,较短的路径上累积的信息素浓度逐渐增高,选择该路径的蚂蚁个数也愈来愈多。最终,整个蚂蚁会在正反馈的作用下集中到最佳的路径上,此时对应的便是待优化问题的最优解。然而,在采矿车的实际工作环境中,如果蚁群算法寻找到的最优路径转弯次数过多,就会导致路径轨迹不平滑,加大矿车行走过程中的能量消耗,降低行走效率。
4、相应地,本领域需要一种基于改进蚁群算法的深海采矿车路径规划方法及系统来解决上述技术问题。
技术实现思路
1、本发明旨在解决上述技术问题,即现有蚁群算法在深海采矿的路径规划中存在路径转弯次数过多,路径轨迹不平滑,行走过程中的能量消耗较大,行走效率较低等问题。
2、本发明提供了一种基于改进蚁群算法的深海采矿车路径规划方法,所述路径规划方法包括:
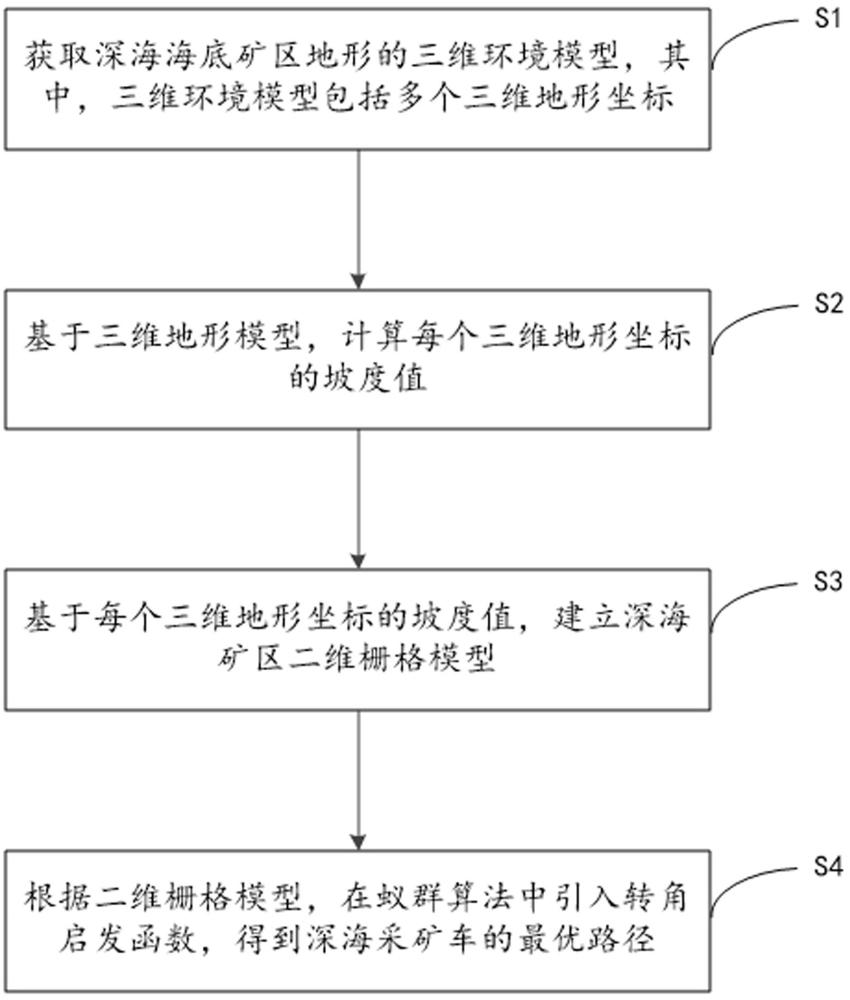
3、s1,获取深海海底矿区地形的三维环境模型,其中,所述三维环境模型包括多个三维地形坐标,
4、s2,基于所述三维地形模型,计算每个三维地形坐标的坡度值,
5、s3,基于每个三维地形坐标的坡度值,建立深海矿区二维栅格模型,
6、s4,根据所述二维栅格模型,在蚁群算法中引入转角启发函数,得到深海采矿车的最优路径。
7、在上述路径规划方法的具体实施方式中,步骤“根据所述二维栅格模型,在蚁群算法中引入转角启发函数,得到深海采矿车的最优路径”进一步包括:
8、获取蚂蚁的数量,并在所述二维栅格模型中确定蚂蚁的起始点位置和目标点位置,
9、基于引入转角启发函数的蚁群算法,获取当前蚂蚁由起始点位置到目标点位置的路径信息,
10、基于蚂蚁的数量,获取全部蚂蚁由起始点位置到目标点位置的路径信息,
11、在所述全部蚂蚁由起始点位置到目标点位置的路径信息中,选取最优的路径信息。
12、在上述路径规划方法的具体实施方式中,步骤“基于引入转角启发函数的蚁群算法,获取当前蚂蚁由起始点位置到目标点位置的路径信息”进一步包括:
13、引用伪随机比例规则,在当前蚂蚁由起始点位置到目标点位置的路程中,计算当前节点周围的八个节点的通行性与每个可通行节点的转移概率,
14、位于节点( i, j)的蚂蚁 k按照以下公式选择下一个可通行点,
15、,
16、式中,为伪随机比例规则, k为迭代次数, m为当前迭代过程中的蚂蚁,为状态转移概率,为信息素浓度, i, j为是蚂蚁当前路径节点, a 为信息素重要程度参数, b 为启发式因子重要程度参数, γ 为表征转角启发函数重要程度参数, q为转移概率系数, q0为转移概率系数阈值, t( k)为转角启发函数,以避免转弯次数较多;
17、其中,转移概率公式来表示蚂蚁 k在经过一段时间 t以后,选择下一个节点的转移概率,
18、,
19、式中,为蚂蚁 m下一步可以选择前往的节点, t为转角启发函数,以避免转弯次数较多;
20、其中,转角启发函数计算公式为:
21、,
22、式中, θ为路径中三个相邻节点之间的转角,且 θ越小代表路径越平滑,
23、,
24、式中,分别为路径中三个相邻节点的空间坐标。
25、在上述路径规划方法的具体实施方式中,所述转移概率系数阈值的计算公式如下:
26、,
27、式中, k为算法最大迭代次数。
28、在上述路径规划方法的具体实施方式中,在蚁群算法中引入正态分布函数,动态调整启发式信息,调整后的启发式信息计算公式如下:
29、,
30、,
31、式中, c为一个常数, d ij为两节点之间的距离,为经过变形的正态分布函数。
32、在上述路径规划方法的具体实施方式中,步骤“在所述全部蚂蚁由起始点位置到目标点位置的路径信息中,选取最短的路径信息”进一步包括:
33、引入信息素挥发机制在每次迭代过程中不断更新信息素,同时,引入sigmoid函数改进信息素挥发机制来控制整个迭代过程中信息素挥发因子的变化范围与速率,
34、信息素更新策略公式包括:
35、,
36、式中为动态信息素挥发因子;为第 k次迭代中节点 i 到节点 j的信息素; m为蚂蚁总数;为第 k次迭代中第 m只蚂蚁从节点 i 到节点 j的信息素增量; q为信息素强度, k为算法最大迭代次数。
37、其中,改进信息素挥发因子计算公式为:
38、,
39、式中,a和b分别为sigmoid函数的参数。
40、在上述路径规划方法的具体实施方式中,步骤“在所述全部蚂蚁由起始点位置到目标点位置的路径信息中,选取最短的路径信息”进一步还包括:
41、引入奖惩机制来更新路径上的信息素,即对最优路径上的信息素采取奖励的措施,增加更多的信息素;对最差路径上的信息素采取惩罚的措施,适当减少该路径上的信息素,从而使算法快速收敛,
42、信息素更新策略公式包括:
43、,
44、式中, 表示在第 k次迭代中第 m只蚂蚁从节点 i 到节点 j的信息素增量; l m表示第 m只蚂蚁在这次循环中所经过的路径总长度; l y 和 l c 为当前迭代中最优路径和最差路径的长度, l mean为当前迭代中的平均路径长度, μ、分别为最优、最差路径的权重系数。
45、另一方面,本发明还提供了一种基于改进蚁群算法的深海采矿车路径规划系统,该系统实施如上述实施例所述的基于改进蚁群算法的深海采矿车路径规划方法,该系统包括:
46、三维模型获取模块,被配置为能够获取深海海底矿区地形的三维环境模型,其中,所述三维环境模型包括多个三维地形坐标,
47、坡度值计算模块,被配置为能够基于所述三维地形模型,计算每个三维地形坐标的坡度值,
48、二维模型建立模块,被配置为能够基于每个三维地形坐标的坡度值,建立深海矿区二维栅格模型,
49、最优路径得到模块,被配置为能够根据所述二维栅格模型,在蚁群算法中引入转角启发函数,得到深海采矿车的最优路径。
50、结合上述的所有技术方案,本发明提供的基于改进蚁群算法的深海采矿车路径规划方法通过获取深海海底矿区地形的三维环境模型、计算每个三维地形坐标的坡度值以及建立深海矿区二维栅格模型为蚁群算法提供数据支撑,并在蚁群算法中引入转角启发函数,进而可以避免转弯次数较多,以降低采矿车能量消耗,提高最优解的质量,因此,本发明可以得到深海采矿车的最优路径。
- 还没有人留言评论。精彩留言会获得点赞!